惯性导航原理简介 |
您所在的位置:网站首页 › 惯性导航系统组成部分 › 惯性导航原理简介 |
惯性导航原理简介
|
惯性导航的工作原理 ,惯性导航的目的是实现自主式导航,即不依赖外界信息,包括卫星信号、北极指引等。那么惯性是如何实现的呢? 惯性导航工作的核心原理是:它从过去自身的运动轨迹推算出自己目前的方位。其工作技术原理不外乎就是以下三条基本公式: 1. 距离=速度×时间 2. 速度=加速度×时间 3 . 角度=角速度×时间1.首先,检测(或设定好)初始信息,包括初始位置、初始朝向、初始姿态等。 2.用IMU(Inertial Measurement Unit)时刻检测物体运动的变化信息。其中,加速度计测量加速度,利用原理 a=F/M,测量物体的线加速度, 3.乘以时间得到速度,再乘以时间就得到位移,从而确定物体的位置;s=v0+at 4. 陀螺仪则测量物体的角速率,以物体的初始方位作为初始条件,对角速率进行积分,进而时刻得到物体当前方向; 5. 电子罗盘,能在水平位置确认物体朝向。这3个传感器可相互校正,得到较为准确的姿态参数。 最后,通过计算单元实现姿态解、加速度积分、位置计算以及误差补偿,最终得到准确的导航信息 。 惯性导航是如何通过坐标系模型实现定位的?
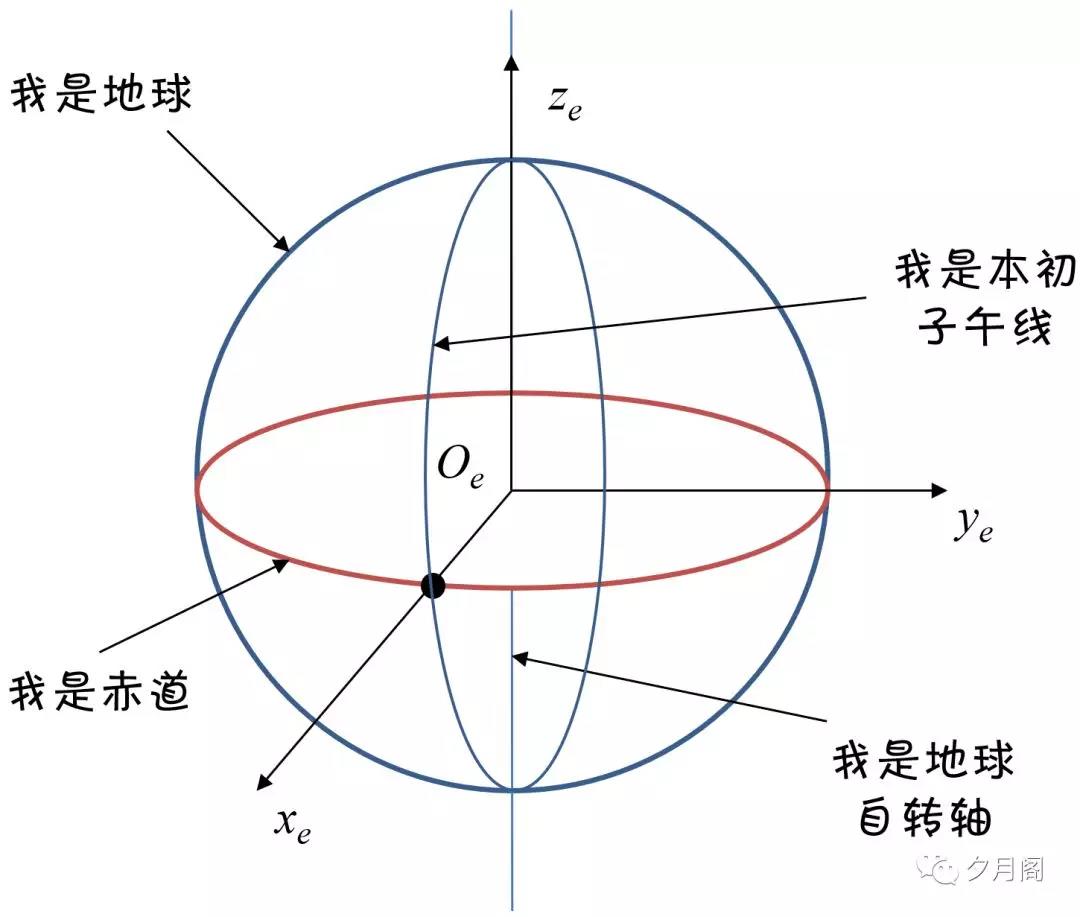
常生活中,我们都通过坐标来定位,二维定位是x轴和y轴,三维定位则加上z轴。通过x轴、y轴和z轴的坐标系模型,传感器能够测量各轴方向的线性运动,以及围绕各轴的旋转运动。 但在实际应用惯性导航中,惯性测量器件是直接安装在运动载体上的,因此惯性器件测得的角速度和加速度的数值都是在载体运动坐标系下的量,即传感器得到的是以物体的固连坐标系为参照的数据(也叫地理坐标系),但我们日常定位用的是地球坐标系,因此如何把测得的固连坐标系数据转换成地球坐标系数据,是惯性导航重要的第一步。 此时,需要引入一个第三者才能实现坐标系转换,即相对静止的惯性坐标系——地心惯性系。 地心惯性系:以地球的地心为原点,以地心指向春分点和秋分点的连线为X轴、Y轴,以地球自转轴指向北极为Z轴组成的右手坐标系。因为春分点和秋分点不是地球表面上和地球固定的两个点,而是地球所属宇宙空间中两个固定的点(因为赤道面和黄道面是固定的面)。所以,春分点和秋分点不会因为地球的自转而移动,故地心惯性系是相对静止的,不会随地球自转而移动。
|

【本文地址】
今日新闻 |
推荐新闻 |