惯性导航基本原理 |
您所在的位置:网站首页 › 惯性导航系统基本原理 › 惯性导航基本原理 |
惯性导航基本原理
|
一、 基本概念
载体:导航系统的装载对象,可以是空间飞行器,导弹,飞机,潜艇,水面舰船,陆用战车,民用车辆等。导航:在规定的条件下,在规定的时间内,按照规定的精度,沿预先拟定的航线,引导航行体(飞行器,船舶,地面车辆等)从起始点到达目的地的技术或方法。导航系统:用来完成引导任务的设备,称为导航系统。导航系统必须具备“测量”和“定位”的功能,才能最终完成“引导”使命。测量和定位是手段,引导是目的。制导系统:如果导航系统既有测量和定位的功能,又有引导功能,再加上控制系统,就是一个完整的“制导系统”。自主导航:安装在航行体(或载体)上的导航系统,仅仅依靠载体上的设备即可完成导航任务。例如惯导。非自主导航:依赖载体上的设备,而且还需利用来自载体外部的参考信息才能够完成导航任务。例如:无线电导航系统和微型导航系统。惯性导航系统是一种“航位推算”系统,利用前一时刻已知的信息和当前时刻的测量信息,推算当前时刻的导航参数(位置、速度和姿态信息)。
二、惯导系统中常用的坐标系
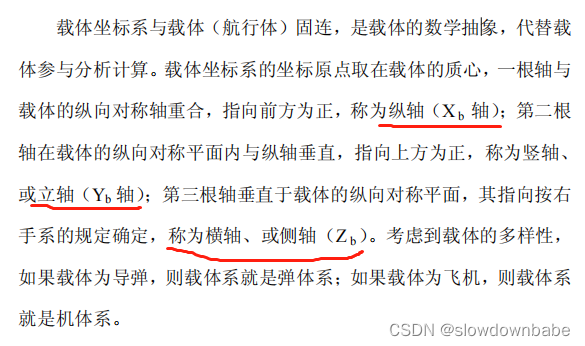
2.1 惯性坐标系(i 系):近似静止的参照物作为惯性参考系。 在惯性技术领域,常用的惯性系有两个: 一个是以太阳中心为坐标原点的“日心惯性系”,三根坐标轴分别指向三个恒星; 另一个是以地球中心为坐标原点的“地心惯性系”,一根坐标轴沿地球的极轴(自转轴)、另外两根轴在地球的赤道平面内,三根轴正交,并分别指向宇宙空间的三个恒星,记为oxiyizi。 地心惯性系与地球不是固连的,不跟随地球一起旋转。 日心惯性系多应用于天文观测和空间飞行器中; 地心惯性系多应用于相对地球表面运动的航行体(飞机,导弹,舰船和战车等)。本文的内容,均以地心惯性系作为参考基准。 2.2 地球坐标系(e 系):地球坐标系与地球固连,随地球一起旋转。 地球坐标系的坐标原点取在地球的中心,并与地球固连。Ze轴沿地球的极轴,指向北极为正,其余两根轴在地球的赤道平面内。Xe轴为零度子午线(0度经线)与赤道平面的交线,由地心向外指为正。Ye轴为东经90°子午面与赤道平面的交线,同样由地心向外指为正。三根轴共同构成右手直角坐标系OXeYeZe. 2.3 载体坐标系(b 系):和之前“前(X)右(Y)下(Z)”有差别。 |
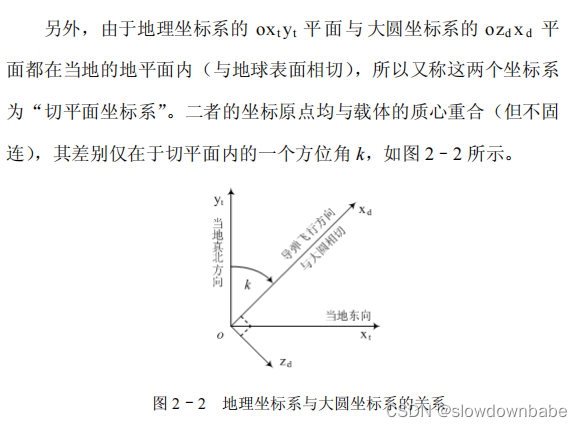
 2.4 地理坐标系(t 系) 地理坐标系的原点取在航行体的质心,随航行体一起运动,但与载体不固连。地理坐标系的定义不同,投影的结果也不同。由于工程界经常采用经度和纬度来表示航行器在地球表面的地理位置,所以又称地理坐标系为“经纬度坐标系”。 国际上统一规定,通过英国格林威治天文台的子午线为零度子午线,也成本初子午线。
2.4 地理坐标系(t 系) 地理坐标系的原点取在航行体的质心,随航行体一起运动,但与载体不固连。地理坐标系的定义不同,投影的结果也不同。由于工程界经常采用经度和纬度来表示航行器在地球表面的地理位置,所以又称地理坐标系为“经纬度坐标系”。 国际上统一规定,通过英国格林威治天文台的子午线为零度子午线,也成本初子午线。 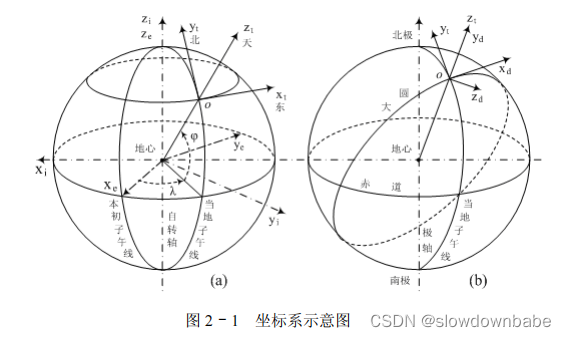 2.5 目标方位坐标系(d 系) 目标方位坐标系,主要用于短程,战术导弹的惯导系统。引入这个坐标系的目的,是为了简化导航方程,从而减少计算量。
2.5 目标方位坐标系(d 系) 目标方位坐标系,主要用于短程,战术导弹的惯导系统。引入这个坐标系的目的,是为了简化导航方程,从而减少计算量。 
 2.6 导航坐标系
2.6 导航坐标系  2.7 平台坐标系(P系)
2.7 平台坐标系(P系) 
【本文地址】
今日新闻 |
推荐新闻 |