kuka焊缝跟踪:激光跟踪+寻位功能解决焊接热变形引起的偏差 |
您所在的位置:网站首页 › 库卡机器人位置偏差 › kuka焊缝跟踪:激光跟踪+寻位功能解决焊接热变形引起的偏差 |
kuka焊缝跟踪:激光跟踪+寻位功能解决焊接热变形引起的偏差
|
kuka机器人机械臂工作半径从635毫米到3900毫米,全部由一个基于工业PC平台的控制器控制。库卡机器人广泛应用在仪器仪表、汽车、航天、消费产品、物流、食品、制药、医学、铸造、塑料等工业。主要应用于材料处理、机床装料、装配、包装、堆垛、焊接、表面修整等领域。
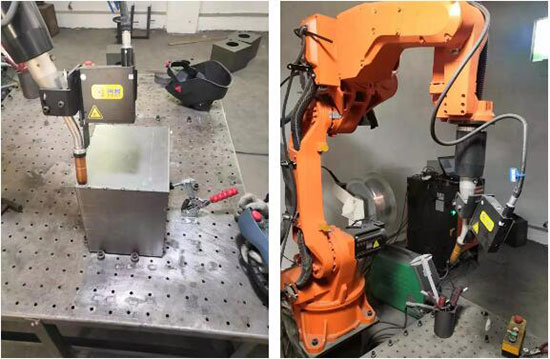
kuka焊缝跟踪采用三角测量原理,通过激光传感器,CCD完成对焊缝位置的识别。 可实现激光跟踪+寻位功能。
功能展示 1)激光跟踪功能 激光前置扫描焊缝位置,并记录在系统里面,kuka机器人行走到测量位置时,纠正偏差。 2)焊缝寻位功能 测量平面焊缝的多个点,计算工件的平面内旋转和平移,将偏差补偿到示教点上。 kuka焊缝跟踪能够解决焊接热变形、工件下料偏差、夹装引起的偏差。
责任编辑: |


 返回搜狐,查看更多
返回搜狐,查看更多【本文地址】
今日新闻 |
推荐新闻 |