机器视觉 · 相机分类及通用参数 |
您所在的位置:网站首页 › 帧率越高延迟越低吗 › 机器视觉 · 相机分类及通用参数 |
机器视觉 · 相机分类及通用参数
文章目录
相机分类通用参数解释 · 分辨率(Resolution)通用参数解释 · 传感器通用参数解释 · 感光元件及像元尺寸通用参数解释 · 色彩捕获通用参数解释 · 黑白/色彩的选择通用参数解释 · 动态范围通用参数解释 · 快门类型通用参数解释 · 曝光时间通用参数解释 · 帧率通用参数解释 · 防护等级
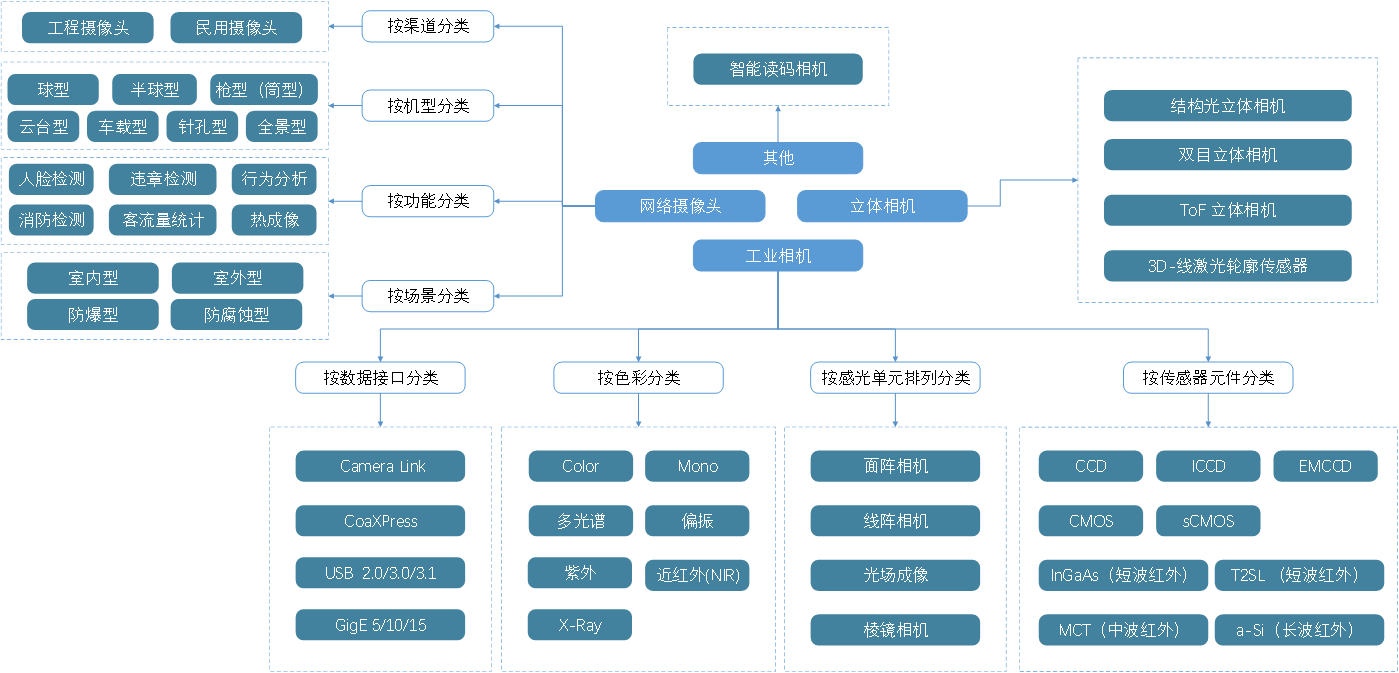
相机分类
 通用参数解释 · 分辨率(Resolution)
相机分辩率:指相机每次采集图像的像素点数(Pixels),即传感器芯片靶面排列的像元数量,如( 1920*1080 )。对于线阵相机而言,分辨率就是传感器水平方向上的像元数,常见有1K、2K、6K等。
相
机
分
辨
率
(
L
/
W
)
≥
视
场
(
L
/
W
)
精
度
(
单
位
:
P
i
x
)
相机分辨率(L/W) ≥ \frac{视场(L/W)}{精度} (单位:Pix)
相机分辨率(L/W)≥精度视场(L/W)(单位:Pix)
通用参数解释 · 分辨率(Resolution)
相机分辩率:指相机每次采集图像的像素点数(Pixels),即传感器芯片靶面排列的像元数量,如( 1920*1080 )。对于线阵相机而言,分辨率就是传感器水平方向上的像元数,常见有1K、2K、6K等。
相
机
分
辨
率
(
L
/
W
)
≥
视
场
(
L
/
W
)
精
度
(
单
位
:
P
i
x
)
相机分辨率(L/W) ≥ \frac{视场(L/W)}{精度} (单位:Pix)
相机分辨率(L/W)≥精度视场(L/W)(单位:Pix)
例如,项目要求视野是100mm*75mm,精度要求为0.05mm,则相机的像素长为100𝑚𝑚/0.05𝑚𝑚=2000 𝑝𝑖𝑥,也就是需要 2000∗1500=3,000,000=300 万像素的相机。 相机极限分辨率:相机的极限空间分辨率不是由相机自身的分辨率决定,而是由传感器芯片的单个像元尺寸决定。具体计算公式如下: 相 机 极 限 分 辨 率 = 1 m m 单 个 像 元 尺 寸 ∗ 2 ( 单 位 : 线 对 / m m ) 相机极限分辨率 = \frac{1mm}{单个像元尺寸*2} (单位:线对/mm) 相机极限分辨率=单个像元尺寸∗21mm(单位:线对/mm)例如,某相机分辨率为130万,传感器为1/3寸CCD,其单个的像元尺寸为3.75um*3.75um,则此相机极限空间分辨率为:1𝑚𝑚/(3.75𝑢𝑚∗2)=133.33 𝑙𝑝/𝑚𝑚 镜头极限分辩率:指在像平面处1毫米内能分辨开的黑白相间的线条对数,单位是线对/毫米 ( l p / m m ) (lp/mm) (lp/mm)。按照相机镜头的匹配原则,镜头的极限分辨率需大于或等于相机的极限分辨率。命名关系:为了方便记忆镜头与相机的匹配关系,人们常采用对应相机的分辨率来命名镜头。这种命名方式其实并不科学,常见命名的对应关系: 极限分辨率商品命名90 线对/mm100 万像素110 线对/mm200 万像素160 线对/mm500 万像素 通用参数解释 · 传感器 传感器芯片按工艺分为: CCD类(Charge Coupled Device,电荷耦合元件),如 CCD、ICCD、EMCCDCMOS类(金属氧化物半导体元件),如 CMOS、sCOMS特殊波长类,如 InGaAs(短波红外)、T2SL(短波红外)、MCT(中波红外)、a-Si(长波红外) 传感器尺寸是以感光元件阵列的有效面积(宽x高)或以对角线大小(英寸)来表示的。相同分辨率的相机,传感器尺寸越大,像元尺寸越大,这样会增加每个像元的感光面积,对提高图像的质量有益。相同工作距离、相同的镜头下,传感器尺寸越大,拍摄的视野越大。同样的500万像素的工业相机,2/3”的传感器成像质量就要优于1/2”的。 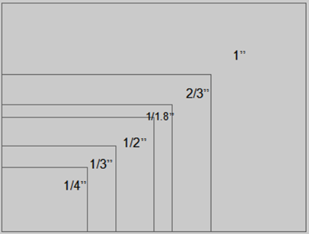 英寸尺寸1/3英寸(4.27mm x 3.2mm)1/2英寸(6.4mm x 4.8mm)1/1.8英寸(7.1mm x 5.3mm)1/1英寸(12.8mm x 9.6mm)
通用参数解释 · 感光元件及像元尺寸
英寸尺寸1/3英寸(4.27mm x 3.2mm)1/2英寸(6.4mm x 4.8mm)1/1.8英寸(7.1mm x 5.3mm)1/1英寸(12.8mm x 9.6mm)
通用参数解释 · 感光元件及像元尺寸
感光元件(像元): 感光元件是传感器芯片中影像捕获的基本单位,每个感光元件对应图像传感器中的一个像素。感光元件的核心是感光二极管(photodiode),感光二极管在接受光线照射之后能够产生输出电流,电流的强度与光照强度对应。像元尺寸: 像元尺寸就是传感器芯片中单个感光元件的面积。单位面积内,像元越小,对细节的解析越好,分辨率越高。像元尺寸和像元数(分辨率)共同决定了相机靶面的大小。随着像元尺寸的缩小,满阱容量(每个感光元件能够储存的电荷数量)也随之减小,造成相机动态范围的降低。
 通用参数解释 · 色彩捕获
通用参数解释 · 色彩捕获
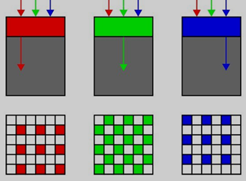
感光元件只能感应光的强度,无法捕获色彩信息。目前,彩色成像工业相机主要分为三棱镜和滤光片2种形式。 滤光片式(拜尔阵列)(单芯片) 在图像传感器前面,设置一个滤光层(Color filter array),上面布满了一个个滤光点,与下层的像素一一对应。滤光层一般使用RGB红绿蓝三色滤光片阵列,以1:2:1的构成,由四个像元构成一个彩色像素。即红蓝滤光片分别覆盖一个像元,剩下的两个像元都覆盖绿色滤光片,采取这种比例的原因是人眼对绿色较为敏感。索尼的四色CCD技术,则将其中的一个绿色滤光片换为翡翠绿色(英文 Emerald,有 些媒体称为E通道),由此组成新的R、G、B、E四色方案。不管是哪一种滤光方案,都要四个像元才能够构成一个彩色像素。由于价格低廉,目前大多数彩色工业相机使用滤光片式采集。
棱镜式(三芯片) 使用三棱镜将射入的白光分成三束,每束光都由不同的内置光栅来过滤出某一种三原色,然后使用三块传感器分别感光。最后再将这三张图像合成一张高分辨率、色彩精确的图像。例如,300万像素的棱镜式CCD相机,就是由 3 块300万像素的CCD来感光,做到同点合成,因此拥有高色彩还原特性,可以满足特殊视觉场景下对颜色的高分辨度需求,但造价比较昂贵,可选的镜头少。 通用参数解释 · 黑白/色彩的选择 除非检测目标与色彩相关,否则一般选用黑白工业相机。
精度比较: 目前大多数彩色工业相机使用拜尔滤光式成像,用4个像元合成一个彩色像素点。每个像元只储存了红/绿/蓝中的一种分量值,但又要在输出彩色图像的同时,保持画幅尺寸不变。所以,在后期的算法处理中,系统会将每个像元丢失的两种颜色分量值,通过反马赛克插值来补回(伪彩色)。(所以型号相同的相机,彩色/黑白价格一样)而黑白相机(准确讲应该是“单色相机”)因为把感光元件前面的拜耳滤镜去掉了,所以每一粒像素(像元)都真正用来感光。因此,同样分辨率下的工业相机,黑白相机的精度比彩色相机更高。感光度: 拜尔滤光式传感器,由于使用了滤色片,所以光线到达像素时经过了衰减。而黑白传感器可以使光线接近100% 能量到达像素,因此黑白传感器拥有更高的感光度。干涉现象: 拜尔滤光式成像在拍摄纹路精细的物体时,很容易产生摩尔纹。摩尔纹的产生是因为采用传统拜尔阵列方式,每四个像素(2 x 2)阵列被重复,也就是说每隔一行(列)相同颜色的像素重复出现。从数学上讲,两个频率接近的等幅正弦波叠加,合成信号的幅度将按照两个频率之差变化。所以如果拍摄画面里面有线条形状是隔一个像素重复出现的话,摩尔纹就容易产生。而且摩尔纹是不规则的,没有明显的形状规律。 通用参数解释 · 动态范围
通用参数解释 · 动态范围
动态范围: 动态范围是用来描述每个像素能够分辨出的灰度等级。它是饱和电压(最大的输出电平)相机输出的噪声之比,动态范围可用倍数、dB 或Bit 等方式来表示。 动 态 范 围 = 感 光 元 件 的 满 阱 容 量 / 等 效 噪 声 信 号 动态范围=感光元件的满阱容量/等效噪声信号 动态范围=感光元件的满阱容量/等效噪声信号宽动态范围,能够使场景中非常亮和非常昏暗部分的细节同时被清晰的显示。一般来说,低动态范围的相机噪声比较多,照片会缺失亮部细节和暗部细节。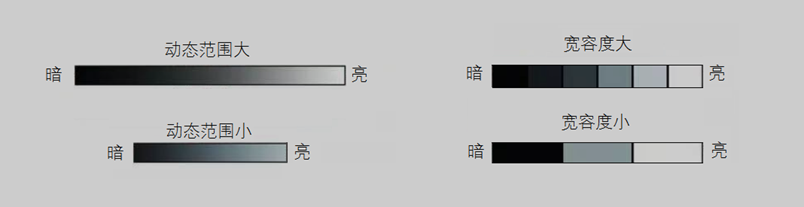 通用参数解释 · 快门类型
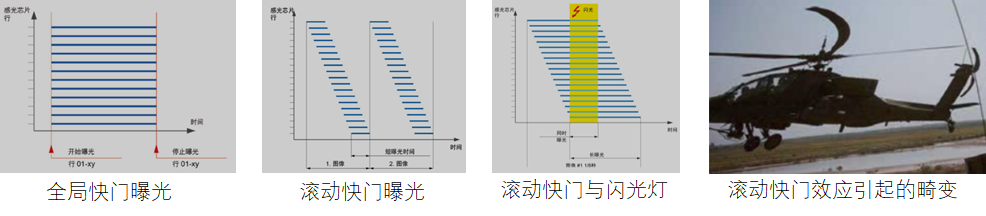
工业相机的快门类型分为:全局快门或滚动快门。全局快门
全局指的是整个表面同时曝光,一次即拍摄整个图像区域。如果相机必须拍摄在快速移动的物体,或相机本身需要快速移动,那么全局快门是理想之选。全局快门每像素需要4-5个晶体管输送电子,往往会产生相对较高的背景噪声和大量热量。 滚动快门(卷帘快门)
相机会以逐行的方式进行连续曝光。滚动快门方法每像素仅需2个晶体管输送电子,因此产生的热量相对较少,背景噪声也低得多。对于运动的目标,滚动快门所造成的畸变往往超出可接受的阈值,因此一般用于拍摄静态对象。搭配频闪光源时,闪光灯周期需与滚动快门周期同步。
通用参数解释 · 快门类型
工业相机的快门类型分为:全局快门或滚动快门。全局快门
全局指的是整个表面同时曝光,一次即拍摄整个图像区域。如果相机必须拍摄在快速移动的物体,或相机本身需要快速移动,那么全局快门是理想之选。全局快门每像素需要4-5个晶体管输送电子,往往会产生相对较高的背景噪声和大量热量。 滚动快门(卷帘快门)
相机会以逐行的方式进行连续曝光。滚动快门方法每像素仅需2个晶体管输送电子,因此产生的热量相对较少,背景噪声也低得多。对于运动的目标,滚动快门所造成的畸变往往超出可接受的阈值,因此一般用于拍摄静态对象。搭配频闪光源时,闪光灯周期需与滚动快门周期同步。
 通用参数解释 · 曝光时间
相机在拍摄运动的物体时,如果物体运动过快,相机的曝光时间设置过长, 则会引起运动模糊。滚动快门效应并不应该与动作模糊混为一谈,使用全局快门芯片同样会出现动作模糊,解决的方式是缩短曝光时间。快门速度(曝光时间):
如果物体运动速度V=100mm/s,项目检测精度 R=0.01 mm,则最大曝光时间 T 计算公式为:
T
=
R
V
=
0.01
m
m
100
m
m
/
s
=
0.0001
s
=
0.1
m
s
T=\frac{R}{V}=\frac{0.01mm}{100mm/s}=0.0001s=0.1ms
T=VR=100mm/s0.01mm=0.0001s=0.1ms通常来说,物体运动引起的模糊应该比我们要求的测量精度小一个数量级。如此短的曝光时间,对光能量要求比较大,因此需要选择合适的光源与光源控制器。
通用参数解释 · 帧率
相机的帧率决定着设备的测量效率。例如:相机的帧率是30 fps,则每秒钟最多拍摄 30 次。实际拍摄的数量及频率,在此范围内,可以由软件或硬件进行触发控制。需注意,帧率决定了最高拍摄频率,而曝光时间,则决定了拍摄质量(是否有拖影),两者不相关。通常来说,相机的分辨率越低,同样的接口,帧率也会越高,而分辨率越高,帧率也会越低。
帧
率
×
分
辨
率
≤
总
线
带
宽
帧率×分辨率≤总线带宽
帧率×分辨率≤总线带宽即,在接口一定(总线带宽已经确定),分辨率一定时,帧率也是有其最大值的。既想要相机的分辨率高,又要想相机的帧率高,那么就需要找更大带宽的总线,也就是传输率更高的相机数据接口。
通用参数解释 · 防护等级
IP(INGRESS PROTECTION)防护等级系统
由IEC(INTERNATIONAL ELECTROTECHNICAL COMMISSION)所起草,将电器依其防尘防湿气特性加以分级。 IP防护等级是由两个数字所组成:
第1个数字,表示电器防尘、防止外物侵入的等级 (这里所指的外物:含工具,人的手指等均不可接触到电器之内带电部分,以免触电)第2个数字,表示电器防湿气、防水浸入的密闭程度,数字越大表示其防护等级越高。
通用参数解释 · 曝光时间
相机在拍摄运动的物体时,如果物体运动过快,相机的曝光时间设置过长, 则会引起运动模糊。滚动快门效应并不应该与动作模糊混为一谈,使用全局快门芯片同样会出现动作模糊,解决的方式是缩短曝光时间。快门速度(曝光时间):
如果物体运动速度V=100mm/s,项目检测精度 R=0.01 mm,则最大曝光时间 T 计算公式为:
T
=
R
V
=
0.01
m
m
100
m
m
/
s
=
0.0001
s
=
0.1
m
s
T=\frac{R}{V}=\frac{0.01mm}{100mm/s}=0.0001s=0.1ms
T=VR=100mm/s0.01mm=0.0001s=0.1ms通常来说,物体运动引起的模糊应该比我们要求的测量精度小一个数量级。如此短的曝光时间,对光能量要求比较大,因此需要选择合适的光源与光源控制器。
通用参数解释 · 帧率
相机的帧率决定着设备的测量效率。例如:相机的帧率是30 fps,则每秒钟最多拍摄 30 次。实际拍摄的数量及频率,在此范围内,可以由软件或硬件进行触发控制。需注意,帧率决定了最高拍摄频率,而曝光时间,则决定了拍摄质量(是否有拖影),两者不相关。通常来说,相机的分辨率越低,同样的接口,帧率也会越高,而分辨率越高,帧率也会越低。
帧
率
×
分
辨
率
≤
总
线
带
宽
帧率×分辨率≤总线带宽
帧率×分辨率≤总线带宽即,在接口一定(总线带宽已经确定),分辨率一定时,帧率也是有其最大值的。既想要相机的分辨率高,又要想相机的帧率高,那么就需要找更大带宽的总线,也就是传输率更高的相机数据接口。
通用参数解释 · 防护等级
IP(INGRESS PROTECTION)防护等级系统
由IEC(INTERNATIONAL ELECTROTECHNICAL COMMISSION)所起草,将电器依其防尘防湿气特性加以分级。 IP防护等级是由两个数字所组成:
第1个数字,表示电器防尘、防止外物侵入的等级 (这里所指的外物:含工具,人的手指等均不可接触到电器之内带电部分,以免触电)第2个数字,表示电器防湿气、防水浸入的密闭程度,数字越大表示其防护等级越高。
防护等级 · IP后第一位数字防尘等级 数字防护范围说明0无防护对外界的人或物无特殊的防护1防止直径大于50mm的固体外物侵入防止人体(如手掌)因意外而接触到电器内部的零件,防止较大尺寸(直径大于50mm)的外物侵入2防止直径大于12.5mm的固体外物侵入防止人的手指接触到电器内部的零件,防止中等尺寸(直径大于12.5mm)的外物侵入3防止直径大于2.5mm的固体外物侵入防止直径或厚度大于2.5mm的工具、电线及类似的小型外物侵入而接触到电器内部的零件4防止直径大于1.0mm的固体外物侵入防止直径或厚度大于1.0mm的工具、电线及类似的小型外物侵入而接触到电器内部的零件5防止外物及灰尘完全防止外物侵入,虽不能完全防止灰尘侵入,但灰尘的侵入量不会影响电器的正常运作6防止外物及灰尘完全防止外物及灰尘侵入防护等级 · IP后第二位数字:防水等级 数字防护范围说明0无防护对水或湿气无特殊的防护1防止水滴浸入垂直落下的水滴(如凝结水)不会对电器造成损坏2倾斜15度时,仍可防止水滴浸入当电器由垂直倾斜至15度时,滴水不会对电器造成损坏3防止喷洒的水浸入防雨或防止与垂直的夹角小于60度的方向所喷洒的水侵入电器而造成损坏4防止飞溅的水浸入防止各个方向飞溅而来的水侵入电器而造成损坏5防止喷射的水浸入防持续至少3分钟的低压喷水6防止大浪浸入防持续至少3分钟的大量喷水7防止浸水时水的浸入在深达1米的水中防30分钟的浸泡影响8防止沉没时水的浸入在深度超过1米的水中防持续浸泡影响。准确的条件由制造商针对各设备指定。 |
【本文地址】