卡尔曼滤波的推导过程详解 |
您所在的位置:网站首页 › 射影定理应用场景是什么 › 卡尔曼滤波的推导过程详解 |
卡尔曼滤波的推导过程详解
|
在学习卡尔曼滤波的时候看了很多博客讲这方面的知识,感觉都讲得表面的东西,无法了解它五个公式真正代表的过程,这篇博客我想以我的理解讲讲卡尔曼滤波。 首先我先写出卡尔曼滤波的具体过程,首先针对如下状态空间模型(因为卡尔曼滤波都是针对状态空间模型进行滤波的): 其中 针对上述模型存在如下卡尔曼滤波迭代公式:
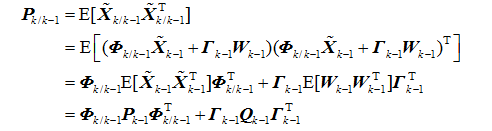
这里我想解释一下这五个公式中变量代表的含义: 1. 2. 3. 4. 5. 通过上述的解释后,我将卡尔曼滤波推导过程写下来,推导的方式我现在看到的有两种:一种是严恭敏老师在捷联惯导算法与组合导航算法中的推导;一种是邓自立老师在信息融合滤波理论及其应用中的推导。严老师的推导过程便于理解,但是推导过程不是特别严谨,邓老师的推导过程严谨,但是过程很难理解,但是理解之后对于后续的学习很有好处,不然你连新息是啥都不知道。 严老师推导过程由状态方程可知,一步预测状态表达式如下:
这里是因为系统方差W为零均值的误差,所以有: 则状态一步预测误差如下: 将状态方程和一步预测表达式带入上式可知:
由此可得一步预测均方差误差阵:
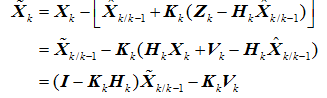
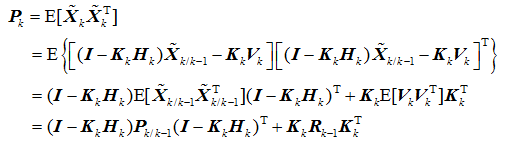
我们定义一个名词:新息,新息表达式如下: 这里可以通过新息来对状态估计值来进行修正,即得到如下式子: 由此我们可以得到k时刻的状态估计误差如下:
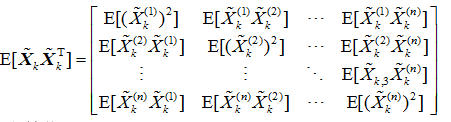
状态估计误差均方差阵如下:
下面就是怎么来求滤波增益K的问题??我们估计状态的目的肯定是为了使得估计值与真实值之间误差最小,这里的误差最小指的各个状态的均方误差之和最小,即:
等价于:
由此可得:
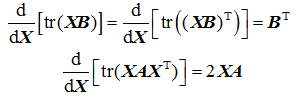
求 下面给出矩阵求导的两个式子如下:
利用矩阵求导式子对
根据函数极值原理,令其右端等于零可得:
将式16带入式9,即可得到:
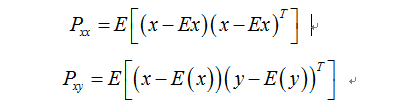
由此卡尔曼滤波的五个迭代式子就都导出了,感觉这样推导比较好理解一点,因为严老师在讲义上讲这部分很细,所以以上部分好多都是照搬的,自己理解的部分很少,有不懂的可以多看看严老师讲义。 邓老师书上推导邓老师推导过程就相对而言更加严谨一点,需要的数学知识也多一点,以下全都是我个人对书上知识的理解。 首先我们要估计一个系统的状态值,我们能够获得的是系统输出的测量值y(t),即我们要做的就是怎么利用y(t)来估计状态x(t),我们采用的是线性最小估计,即: 其中A,b都为矩阵,我们需要做的就是怎么获得参数A和b。 首先我们得到期望方差均方差表达式如下: 选择A和b极小化J,则有 则有: 将式2.4带入式2.2,则有: 这里不妨令:
则有:
置
因为:
则有:
由此可得线性最小估计下,状态估计值表达式如下:
射影定理: 我一直想着怎么将这段知识能把射影定理给绕过去,因为射影定理理解起来比较难,但是没办法,还是绕不过去,还是需要了解一些定义。 推论1:(正交性) 证明:
上述式子成立是因为:
由此证明上述推论。 定义:我们称
推论2:设x为零均值随机变量,y(1),y(2),.....y(k)为零均值互不相关的随机变量,则有:
这个式子应该比较好理解,我就不证明了,你可以看成向量x投影到由y(1),y(2),.....y(k)为基组合构成的向量上投影等于向量x分别投影到y(1),y(2),.....y(k)基向量上分量的组合。 由此我们可以通过x投影到由y(1),y(2),.....y(k)构成的平面上的分量,即我们的估计值,计算过程如下:
从2.15可知,由于 定义:设y(1),y(2),......y(k)为存在二阶矩的随机序列,其新息序列定义为: 定理3:信息序列 综上可得递推射影定理:
证明过程如下:
有了递推射影公式现在来推导卡尔曼滤波的五个公式。 表达式1现在针对状态方程在y(1).............y(k-1)构成的平面空间进行投影,可得;
通过对最上面的状态空间模型不断迭代可知,y(t)的值只与w(1).......w(t-1),v(t),x(0)有关,表达式如下:
由此:
其中L代表线性空间,可得:
由于系统噪声w(t)为零均值白噪声,且与测量v(t)互不相关,则有:
由此可得:
因为:
所以有:
所以简化式2.23可得:
由射影递推公式可得:
其中:
这里是因为有:
这里是因为:
将式2.20和式2.19带入式2.18可得
其中有:
带入上式有:
由此可得卡尔曼滤波所有表达式的推导,希望对你们理解卡尔曼滤波过程有帮助。
|

 (4)
(4) (5)
(5) (8)
(8) (9)
(9) (10)
(10)  (11)
(11) (14)
(14) (15)
(15) (2.5)
(2.5)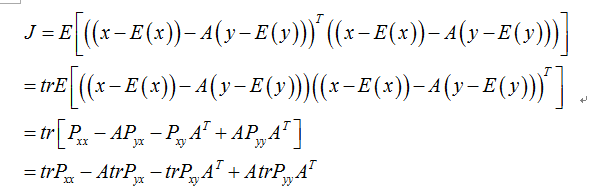 (2.6)
(2.6)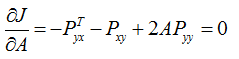 (2.7)
(2.7)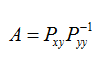 (2.9)
(2.9)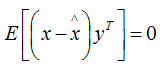 (2.11)
(2.11)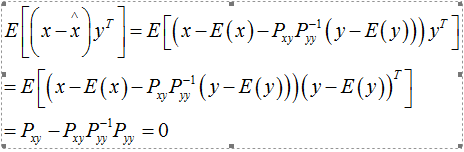 (2.12)
(2.12) (2.13)
(2.13)
 (2.14)
(2.14) (2.15)
(2.15)
 (2.17)
(2.17)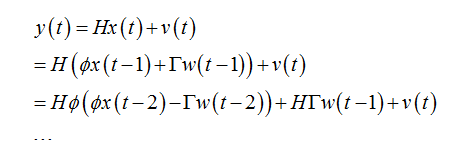 (2.18)
(2.18) (2.23)
(2.23) (2.17)
(2.17) (2.18)
(2.18) (2.19)
(2.19)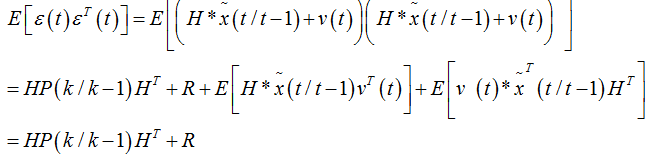 (2.20)
(2.20)

【本文地址】