深入解析YOLOv8:网络结构与推理过程 |
您所在的位置:网站首页 › 头部结构怎么画图片简单 › 深入解析YOLOv8:网络结构与推理过程 |
深入解析YOLOv8:网络结构与推理过程
|
深入解析YOLOv8:网络架构与推理过程全解析
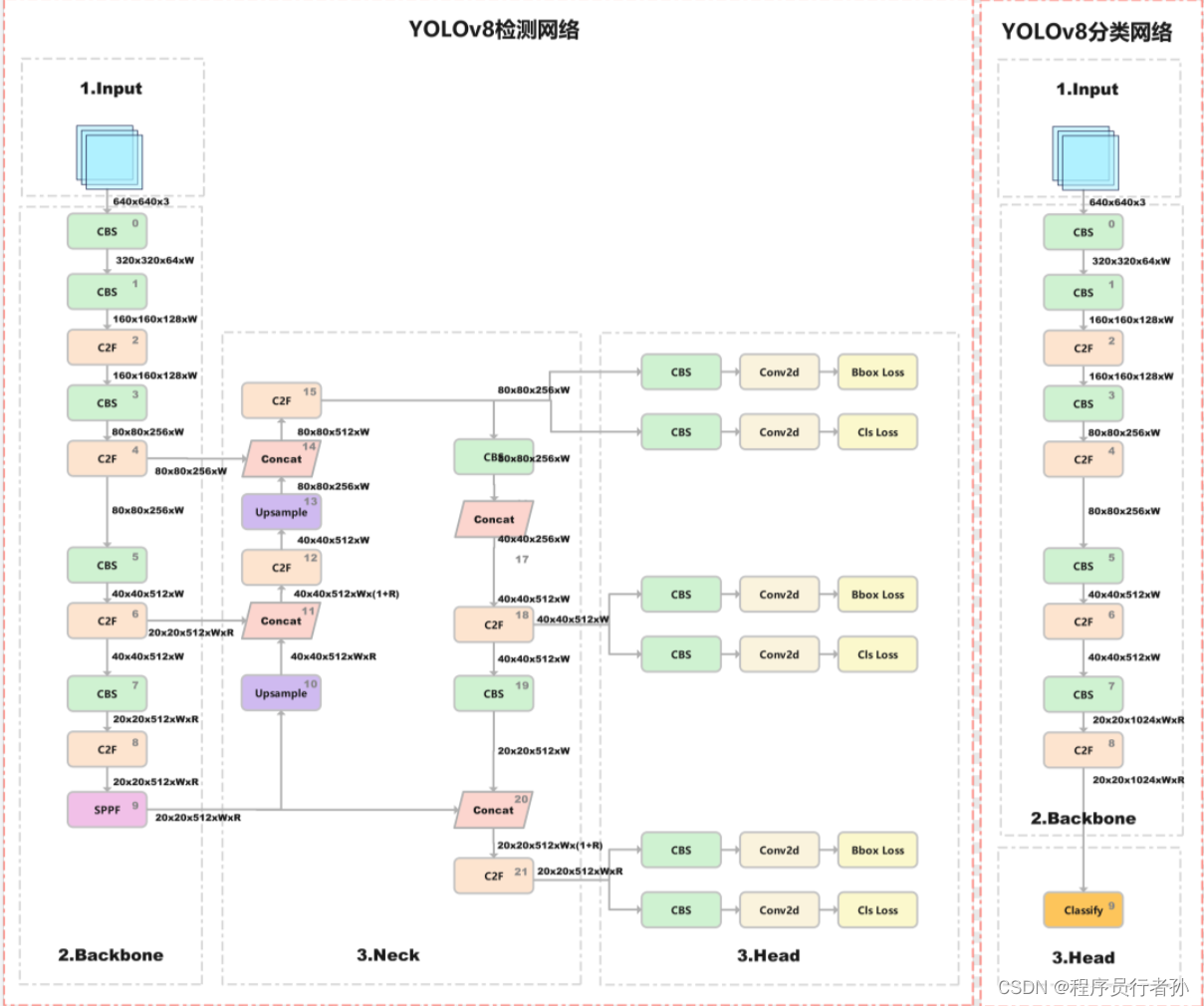
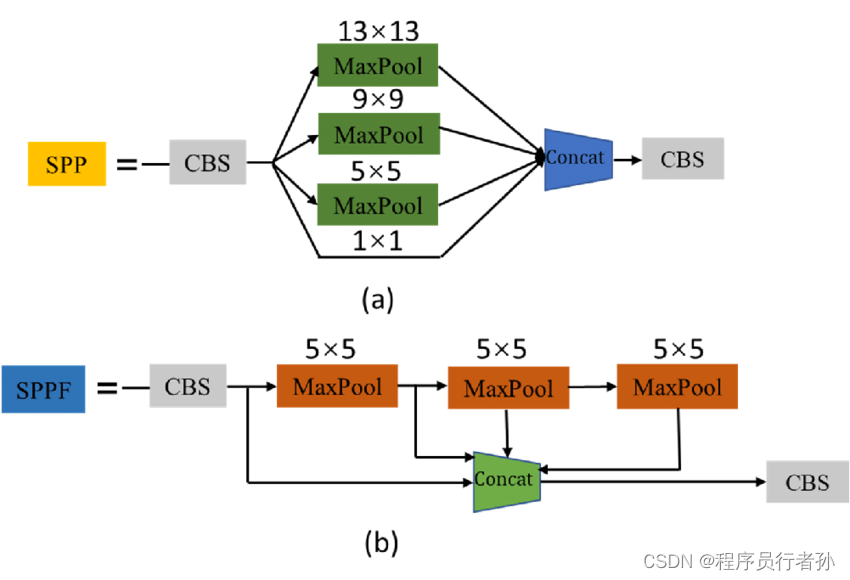
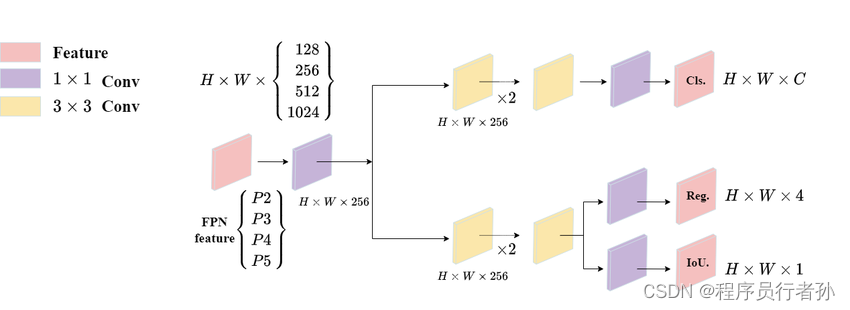
YOLOv8作为目标检测领域的2023年最新力作,继承并发展了YOLO系列的设计理念,实现了在速度和准确性上的新突破。本文将深入解析YOLOv8的网络架构,并探讨其模型推理过程,旨在为读者提供一个全面的技术视角。 从yolo配置文件入手 # Ultralytics YOLO 🚀, AGPL-3.0 license # YOLOv8 object detection model with P3-P5 outputs. For Usage examples see https://docs.ultralytics.com/tasks/detect # Parameters nc: 80 # 类别数量 scales: # 模型复合缩放常数 # [depth, width, max_channels] n: [0.33, 0.25, 1024] # YOLOv8n 摘要: 225层, 参数量3157200, 梯度数3157184, 浮点运算8.9 GFLOPs s: [0.33, 0.50, 1024] # YOLOv8s 摘要: 225层, 参数量11166560, 梯度数11166544, 浮点运算28.8 GFLOPs m: [0.67, 0.75, 768] # YOLOv8m 摘要: 295层, 参数量25902640, 梯度数25902624, 浮点运算79.3 GFLOPs l: [1.00, 1.00, 512] # YOLOv8l 摘要: 365层, 参数量43691520, 梯度数43691504, 浮点运算165.7 GFLOPs x: [1.00, 1.25, 512] # YOLOv8x 摘要: 365层, 参数量68229648, 梯度数68229632, 浮点运算258.5 GFLOPs # YOLOv8.0n backbone (主干网络) backbone: # [from, repeats, module, args] - [-1, 1, Conv, [64, 3, 2]] # 0-P1/2 下采样一次 - [-1, 1, Conv, [128, 3, 2]] # 1-P2/4 下采样一次 - [-1, 3, C2f, [128, True]] # 3次C2f模块,使用128通道 - [-1, 1, Conv, [256, 3, 2]] # 3-P3/8 下采样一次 - [-1, 6, C2f, [256, True]] # 6次C2f模块,使用256通道 - [-1, 1, Conv, [512, 3, 2]] # 5-P4/16 下采样一次 - [-1, 6, C2f, [512, True]] # 6次C2f模块,使用512通道 - [-1, 1, Conv, [1024, 3, 2]] # 7-P5/32 下采样一次 - [-1, 3, C2f, [1024, True]] # 3次C2f模块,使用1024通道 - [-1, 1, SPPF, [1024, 5]] # 9 使用SPPF模块进行空间金字塔池化 # YOLOv8.0n head (头部网络) head: - [-1, 1, nn.Upsample, [None, 2, "nearest"]] # 使用最近邻上采样 - [[-1, 6], 1, Concat, [1]] # 与主干网络的P4层进行拼接 - [-1, 3, C2f, [512]] # 12 - [-1, 1, nn.Upsample, [None, 2, "nearest"]] # 使用最近邻上采样 - [[-1, 4], 1, Concat, [1]] # 与主干网络的P3层进行拼接 - [-1, 3, C2f, [256]] # 15 (P3/8-small) - [-1, 1, Conv, [256, 3, 2]] # 16 - [[-1, 12], 1, Concat, [1]] # 与先前头部的P4层进行拼接 - [-1, 3, C2f, [512]] # 18 (P4/16-medium) - [-1, 1, Conv, [512, 3, 2]] # 19 - [[-1, 9], 1, Concat, [1]] # 与先前头部的P5层进行拼接 - [-1, 3, C2f, [1024]] # 21 (P5/32-large) - [[15, 18, 21], 1, Detect, [nc]] # 在P3, P4, P5上进行检测配置文件是用于定义YOLOv8模型结构和训练参数的YAML文件。以下是配置文件中每个参数的详细解释: 通用参数 nc: 表示类别的数量,这里是80,意味着模型将被训练来识别80个不同的对象类别。 Scales scales: 这部分定义了不同规模的模型版本,每个版本有一组特定的缩放因子。 n: 表示YOLOv8的Nano版本,后面跟着的三个数字分别代表深度缩放因子、宽度缩放因子和最大通道数。s, m, l, x: 分别表示Small、Medium、Large和Extra Large版本的模型,具有不同的缩放因子。 Backbone backbone: 这部分定义了YOLOv8模型的主干网络结构,它由多个卷积层和C2f模块组成。 -1: 表示从上一个层获取特征。Conv: 表示普通的卷积层,后面跟着的是输出通道数、卷积核大小和步长。C2f: 是YOLOv8中的特殊模块,用于替代传统的C3模块,增强梯度流动。SPPF: 表示空间金字塔池化模块,用于增大感受野。 Head head: 这部分定义了YOLOv8模型的头部网络结构,用于将主干网络的特征图与上采样的特征图进行拼接,并通过一系列卷积操作生成最终的检测结果。 nn.Upsample: 表示上采样层,用于将低分辨率的特征图上采样到更高的分辨率。Concat: 表示特征图的拼接操作,用于将不同层级的特征图合并。Detect: 是最终的检测层,它将前面的特征图转换为检测结果,包括边界框、类别和置信度。 特定参数的含义 [from, repeats, module, args]: 这是定义网络层的标准格式。 from: 指定层的输入来源,-1表示前一层。repeats: 表示模块重复的次数。module: 要使用的模块类型。args: 传递给模块的参数,通常是具体的配置,如卷积层的通道数、核大小和步长。 示例 # YOLOv8.0n backbone: 这是YOLOv8 Nano版本的主干网络注释。- [-1, 1, Conv, [64, 3, 2]]: 这表示一个卷积层,输入来自前一层(-1),不重复(1),模块类型为Conv,参数为[64, 3, 2],即64个输出通道,3x3的卷积核,步长为2。 注意 Detect层的参数[nc]表示检测头的输出将包含每个边界框的类别预测,其中nc是类别总数。这个配置文件是YOLOv8模型的蓝图,它详细地描述了模型的每个组件和如何将它们组合在一起。通过调整这些参数,可以定制模型的尺寸和性能,以适应不同的应用需求。 关键改动YOLOv8的架构和算法设计包含以下关键改动: Backbone与Neck的优化YOLOv8的Backbone借鉴了YOLOv7的ELAN设计,通过采用C2f结构替代了YOLOv5中的C3结构,增强了梯度流动,提升了模型性能。此外,不同尺寸的模型调整了通道数,以实现更精细的模型性能优化。 Backbone优化:C2f结构:YOLOv8的Backbone采用了C2f(Cross-convolution with 2 filters)结构,替代了YOLOv5中的C3结构。C2f结构通过使用两个不同大小的卷积核(例如,1x1和3x3)来代替传统的3x3卷积核,增加了网络的感受野,同时减少了计算量。 梯度流动:C2f结构改善了梯度流动,有助于更有效地训练深层网络,从而提高模型性能。 通道数调整:YOLOv8根据不同尺度的模型调整了通道数,这种精心设计的微调使得每个尺度的模型都能以最优的资源消耗实现最佳性能。 下采样策略:通过在关键点使用卷积层进行下采样(例如,使用步长为2的卷积核),YOLOv8能够有效地减少特征图的尺寸,同时保留空间信息。 SPPF模块:在Backbone的最后,YOLOv8使用了SPPF(Spatial Pyramid Pooling Fast)模块,它通过不同尺寸的池化窗口捕捉多尺度的特征,增强了模型对不同尺寸目标的检测能力。 特征融合:YOLOv8的Neck部分通过特征融合技术,如Concatenation(拼接),将不同尺度的特征图结合起来,这样可以恢复因下采样而丢失的空间分辨率,同时保留高层语义信息。 上采样和拼接:YOLOv8在Neck中使用了上采样操作,将高分辨率的特征图与主干网络中的特征图进行拼接,这有助于在不同尺度上进行更精确的目标检测。 解耦头结构(Decoupled-Head):YOLOv8的Head部分采用了解耦头结构,将分类和检测任务分离开来,这样可以专注于各自的任务并提高性能。 Anchor-Free设计:YOLOv8的Head部分从基于锚点(Anchor-Based)的设计转变为无锚点(Anchor-Free)的设计,简化了模型并可能提高了泛化能力。 动态量化:YOLOv8引入了动态量化技术,可以在不牺牲太多准确率的情况下显著减少模型大小和提高推理速度。 通过这些优化,YOLOv8的Backbone和Neck能够更有效地提取和融合特征,从而在目标检测任务中实现更高的准确性和效率。这些改进有助于YOLOv8在各种计算资源和应用场景中发挥出色的性能。 Head的改进YOLOv8的Head部分实现了两大改进: 采用了当前主流的解耦头(Decoupled-Head)结构,将分类和检测任务分离,提高了模型的专注性和效率。从基于锚点(Anchor-Based)的检测转变为无锚点(Anchor-Free)的检测,简化了模型并可能提高了泛化能力。 YOLOv8的Head部分进行了一系列的改进,以提高目标检测的性能和准确性。以下是YOLOv8 Head部分的具体改进,以及它们对模型性能的影响: 1. 解耦头结构 (Decoupled-Head)
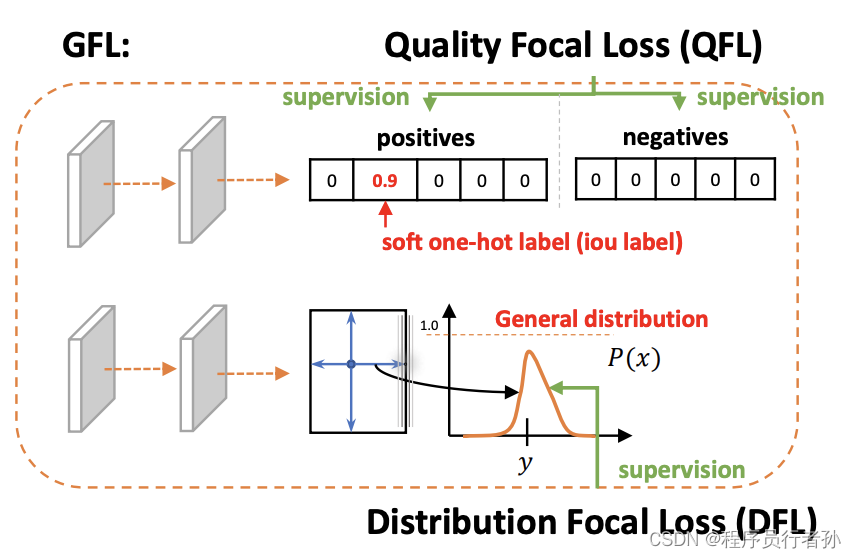
影响: 分离的头结构使得模型能够更有效地学习类别特征和空间特征,从而提升了检测性能。 2. Anchor-Free 设计改进: YOLOv8的Head部分从基于锚点(Anchor-Based)的设计转变为无锚点(Anchor-Free)的设计。 影响: 简化了模型的复杂性,减少了对预定义锚点尺寸的依赖,提高了模型的泛化能力。 3. 多尺度特征融合改进: 通过上采样和拼接操作,YOLOv8将不同尺度的特征图融合在一起。 影响: 融合高分辨率和低分辨率的特征图有助于模型在不同尺度上进行更精确的目标检测。 4. 动态量化改进: YOLOv8引入了动态量化技术。 影响: 在保持准确性的同时,减少了模型的大小和提高了推理速度,有助于在资源受限的设备上部署模型。 结构化展示以下是YOLOv8 Head部分的结构化展示,说明了不同组件及其作用: YOLOv8 Head Structure │ ├── Upsampling & Concatenation │ ├── Upsample low-resolution feature maps │ ├── Concatenate with high-resolution feature maps from backbone │ ├── C2f Modules │ ├── Apply C2f modules for further feature extraction │ ├── SPPF Module │ ├── Capture multi-scale features for improved small object detection │ ├── Decoupled Head │ ├── Separate classification and detection tasks │ ├── Anchor-Free Design │ └── Remove dependency on predefined anchor box sizes │ ├── Loss Function Innovations │ ├── Task-Aligned Assigner for sample matching │ └── Distribution Focal Loss (DFL) for imbalanced datasets │ └── Detect Layer ├── Integrate multi-scale features └── Output predictions: bounding boxes, class probabilities, and confidence scores通过这些结构化的改进,YOLOv8的Head部分能够更有效地处理多尺度的特征图,并生成高质量的检测结果,从而在目标检测任务中实现更高的准确性和效率。 Loss函数的创新YOLOv8在Loss计算上做了重要更新: 引入了Task-Aligned Assigner,这是一种先进的正负样本匹配策略,替代了传统的IOU匹配方法。采用了Distribution Focal Loss(DFL),这是一种新的损失函数,旨在优化模型对不平衡数据集的学习。 1. Task-Aligned Assigner创新点: YOLOv8采用了Task-Aligned Assigner来进行正负样本的匹配。这种匹配策略比传统的基于IOU(交并比)的匹配方式更为先进,它通过考虑分类和回归的分数来动态分配正负样本。 影响: 这种动态分配策略能够更有效地利用训练数据,尤其是在类别不平衡的情况下,提高了模型对少数类样本的检测能力。 2. Distribution Focal Loss (DFL)
创新点: YOLOv8引入了Distribution Focal Loss,这是一种新的损失函数,用于优化边界框预测。DFL通过积分形式的表示法来处理边界框预测,允许模型更细致地学习对象的位置。 影响: DFL有助于解决类别不平衡问题,并且可以减少对难分样本的惩罚,从而提高模型在复杂场景下的性能。 3. CIoU Loss
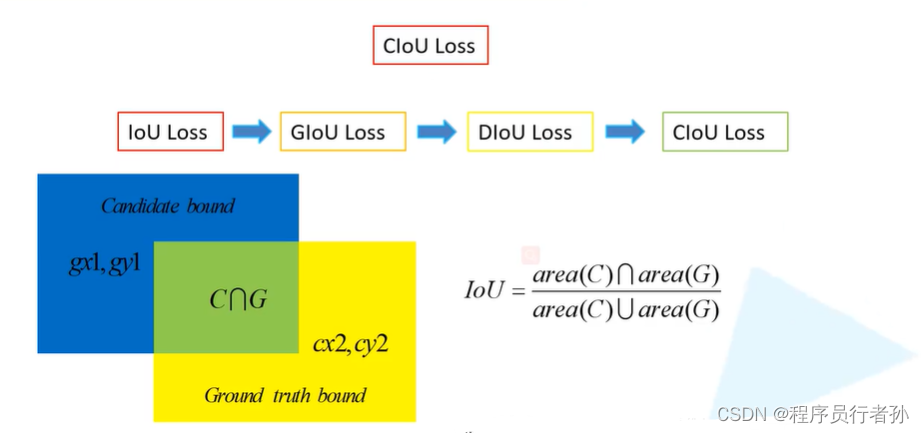
创新点: YOLOv8在边界框预测中使用了CIoU(Complete Intersection over Union)Loss,这是一种改进的IOU损失函数,它考虑了边界框的对齐和尺度。 影响: CIoU Loss有助于更准确地预测边界框,尤其是在目标形状和尺寸变化较大的情况下。 结构化展示以下是YOLOv8损失函数的结构化展示,说明了不同组件及其作用: YOLOv8 Loss Function Components │ ├── Task-Aligned Assigner │ └── Dynamically assign samples based on classification and regression scores │ ├── Distribution Focal Loss (DFL) │ ├── Optimize bounding box predictions with integral representation │ └── Address class imbalance and focus on hard examples │ └── CIoU Loss ├── Predict bounding boxes with consideration of alignment and scale └── Improve accuracy in scenarios with varying object shapes and sizes通过这些创新的损失函数,YOLOv8能够更有效地从训练数据中学习,并在目标检测任务中实现更高的准确性和鲁棒性。这些损失函数的改进使得YOLOv8在处理不平衡数据集和复杂场景时表现更为出色。 训练策略在训练策略上,YOLOv8引入了YOLOX的数据增强策略,特别是在训练的最后10个epoch关闭了Mosaic增强,这一策略有效地提升了模型的精度。 核心特性YOLOv8的主要改进集中在以下几个方面: 模型尺寸与性能YOLOv8提供了多种尺寸的模型,包括Nano(N)、Small(S)、Medium(M)、Large(L)和Extra Large(X),以适应不同的应用场景。这些模型不仅覆盖了从移动设备到高性能服务器的多样化需求,还通过缩放系数实现了性能与资源的平衡。 YOLOv8的设计哲学在于提供一系列不同尺寸的模型,以满足不同计算能力和应用场景的需求。这些模型通过精心设计的缩放系数,实现了在资源消耗和性能之间的平衡。以下是对YOLOv8模型尺寸与性能的进一步扩写: 1. 模型尺寸的多样性YOLOv8的设计者们提供了多种尺寸的模型,以适应不同的硬件平台和应用需求。这些模型的尺寸包括: Nano (N): 这是YOLOv8系列中最小的模型,拥有较少的参数和较低的计算需求,适合在资源受限的环境如移动设备或嵌入式系统上运行。Nano模型特别适用于需要快速推理速度的场景。 Small (S): 小型模型在Nano的基础上增加了一些参数和计算量,以提供更好的性能。S尺寸的模型适合在个人电脑或中等性能的服务器上运行,适用于需要平衡速度和准确性的应用。 Medium (M): 中型模型进一步增加了模型的复杂度,提供了更高的检测准确率。M尺寸的模型适合在具有一定计算资源的服务器上运行,适用于对准确性要求较高的场景。 Large (L): 大型模型具有更多的参数和更高的计算需求,能够提供更精确的检测结果。L尺寸的模型适合在高性能服务器或云端环境中运行,适用于对检测精度有极高要求的专业应用。 Extra Large (X): 这是YOLOv8系列中最大的模型,它拥有最多的参数和最高的计算需求,但同时也能提供顶尖的检测性能。X尺寸的模型适合在大规模计算集群或高性能计算云平台上运行,适用于科研和一些对精度有极端要求的商业应用。 2. 缩放系数的作用YOLOv8的缩放系数是模型尺寸变化的关键,它们通过调整模型的深度(层数)、宽度(每层的通道数)和最大通道数来实现模型的缩放。缩放系数允许用户根据具体的应用需求和硬件限制来选择最合适的模型尺寸,从而在模型的性能和资源消耗之间取得最佳平衡。 3. 性能与资源的平衡不同尺寸的YOLOv8模型在性能和资源消耗方面有不同的权衡: 速度与精度: 较小的模型(如N、S尺寸)在推理速度上有优势,但可能在检测精度上有所妥协。相反,较大的模型(如L、X尺寸)虽然在检测精度上更为出色,但需要更多的计算资源和时间。 资源消耗: 较小的模型占用的内存和存储空间较少,适合在资源受限的设备上运行。而较大的模型则需要更多的内存和存储空间。 能耗考虑: 在电池供电的移动设备上,较小的模型能够减少能耗,延长设备的使用时间。 应用场景匹配: 选择模型尺寸时,需要考虑应用场景的具体需求。例如,实时视频分析可能需要快速的推理速度,而高精度的图像分类任务则可能更注重模型的检测精度。 通过提供多种尺寸的模型,YOLOv8能够灵活地适应不同的应用需求,从简单的物体检测到复杂的场景解析,都能够找到合适的解决方案。 高分辨率检测YOLOv8通过其多尺度检测网络,能够处理不同分辨率的图像。P5 640和P6 1280指的是模型在第五个尺度(P5)上以640像素的分辨率进行检测,在第六个尺度(P6)上以1280像素的分辨率进行检测。这种多尺度的检测能力使得YOLOv8能够适应各种不同的应用场景,包括那些需要极高分辨率图像分析的场景。 实例分割能力除了目标检测,YOLOv8还集成了基于YOLACT的实例分割模型,这使得它能够区分并分割图像中单个对象的像素,进一步拓展了其应用范围。 网络结构 1. Backbone(主干网络)YOLOv8的Backbone负责从输入图像中提取特征,通常采用类似于CSPDarknet的结构,这种结构可以有效减少计算量并提高特征提取效率。根据搜索结果[2],YOLOv8的Backbone可能参考了YOLOv7的ELAN设计思想,通过精心设计的C2f结构(一种改进的Bottleneck结构)来提升梯度流动和模型性能。 下面是一个简化的流程图,展示YOLOv8 Backbone的网络结构: 输入图像 Backbone Conv + C2f 特征金字塔 P3 Conv + C2f 特征金字塔 P4 Conv + C2f + SPPF 特征金字塔 P5 输出特征Conv + C2f:这是YOLOv8中用于构建特征金字塔的基础模块。其中,Conv代表卷积层,C2f代表CSPLayer_2Conv模块,用于减少计算量并增加梯度流。 特征金字塔 P3, P4, P5:这些表示不同层级的特征金字塔,它们分别对应于不同尺度的特征表示。在目标检测中,特征金字塔允许模型同时检测不同尺寸的目标。 SPPF (Spatial Pyramid Pooling Fast):这是一种空间金字塔池化模块的快速版本,用于增大感受野,同时降低计算量。 输出特征:经过Backbone处理后的多尺度特征将被送入后续的Neck和Head部分进行进一步的处理。 更为详细的: +------------------+ +------------------+ +------------------+ | Input Image | --> | Conv [64] | --> | Conv [128] | | (H x W x 3) | | (Downsample) | | (Downsample) | +------------------+ +------------------+ +------------------+ | | | | | | v v v +------------------+ +------------------+ +------------------+ | C2f [128] | | C2f [256] | | C2f [512] | | (3 repetitions)| --> | (2 repetitions) | --> | (2 repetitions) | +------------------+ +------------------+ +------------------+ | | | | | | +---------------------+---------------------+ | | | v v v +------------------+ +------------------+ +------------------+ | Conv [256] | | Conv [512] | | Conv [1024] | | (Downsample) | | (Downsample) | | (Downsample) | +------------------+ +------------------+ +------------------+ | | | | | | +---------------------+---------------------+ | | | v v v +------------------+ +------------------+ +------------------+ | C2f [1024] | | SPPF [1024] | | ... (Further | | (3 repetitions)| --> | (Spatial Pyramid| | layers/modules)| | | | Pooling - Fast)| | | +------------------+ +------------------+ +------------------+ | | | +---------------------+---------------------+在上述结构中: Conv [n]:表示具有n个输出通道的卷积层。C2f [n]:表示YOLOv8中的特殊C2f模块,用于替代传统的C3模块,增强梯度流动。SPPF [n]:表示空间金字塔池化模块,用于增大感受野并提取多尺度的特征。每个Conv [n]后面通常跟有一次下采样操作(例如,步长为2的卷积),用于将特征图的空间尺寸减半,同时增加通道数以保留或增加特征图的参数量。 2. Neck(颈部网络)Neck位于Backbone和Head之间,用于特征融合和增强。YOLOv8采用了FPN(特征金字塔网络)或PANet(路径聚合网络)的思想,通过多尺度的特征融合来提升对不同大小目标的检测能力。 下面是一个简化的流程图,展示YOLOv8 Neck的网络结构: Backbone输出 SPPF 特征金字塔 P5 特征金字塔 P4 上采样 特征融合 特征金字塔 P3 Detect Head 上采样 特征融合 Detect Head 上采样 特征融合 Detect HeadNeck细节: SPPF (Spatial Pyramid Pooling Fast):Backbone的最后一层会通过SPPF,这有助于增大感受野并降低计算量。 特征金字塔:Backbone的输出会形成不同层级的特征金字塔,分别为P3、P4、P5,对应于不同尺度的特征表示。 上采样与特征融合:从P5到P4、P4到P3的上采样过程中,会将来自Backbone的高分辨率特征与低层次的特征进行融合。 Detect Head:融合后的特征将被送入Detect Head进行目标检测的计算。 更为详细的: +------------------+ +------------------+ +------------------+ | High-Level | | Medium-Level | | Low-Level | | Feature Map | --> | Feature Map | --> | Feature Map | | (P5/32) | | (P4/16) | | (P3/8) | +------------------+ +------------------+ +------------------+ | Upsample | Upsample | v v v +------------------+ +------------------+ +------------------+ | 1x1 Conv | | 1x1 Conv | | 1x1 Conv | | (Reduce Channels)| | (Reduce Channels)| | (Reduce Channels)| +------------------+ +------------------+ +------------------+ | | | | | | +-------------+--------------+---------------------+ | | v v +------------------+ +------------------+ | C2f [512] | | C2f [256] | | (2 repetitions) | --> | (2 repetitions) | +------------------+ +------------------+ | | | | +---------------------+ | v +------------------+ | C2f [1024] | | (2 repetitions) | +------------------+ | v +------------------+ | Detect Layer | | (Combine all | | features) | +------------------+在这个流程图中: High-Level, Medium-Level, Low-Level Feature Maps: 分别代表不同尺度的特征图,例如P5/32、P4/16和P3/8。Upsample: 表示将高级别的特征图进行上采样,以便与低级别的特征图尺寸匹配,进行融合。1x1 Conv (Reduce Channels): 1x1的卷积层通常用于降低特征图的通道数,以便于后续操作。C2f [n] (n repetitions): C2f模块是YOLOv8中的一个组件,用于进一步提取特征,其中n表示输出通道数,括号内的数字表示模块重复的次数。Detect Layer: 最后一层,用于将融合后的特征图转换为最终的检测结果,包括边界框坐标、类别概率和置信度分数。 3. Head(头部网络)Head是模型的最后一层,负责产生最终的检测结果。YOLOv8的Head部分可能包括上采样层、连接层和最终的Detect层,用于生成类别预测和边界框坐标。 YOLOv8的Head网络结构是目标检测模型中的关键部分,它负责对提取到的特征进行最终的分类和边界框回归。根据提供的搜索结果,尤其是搜索结果索引1和索引3,我们可以了解到YOLOv8的Head结构采用了Decoupled Head,即将分类和回归分支进行分离,并且每个输出分支进一步细分为两部分,分别用于分类和回归边框。 下面是一个简化的流程图,展示YOLOv8 Head的网络结构: 输入特征图 Decoupled Head 分类分支 回归分支 Cls类别分支 Box回归分支 类别预测 边界框预测 类别输出 边界框输出在搜索结果索引1中提到的Decoupled Head具有以下特点: 分类分支 (Cls类别分支):负责预测每个边界框内对象的类别。其通道数 Ccls 是基于类别数量和模型配置来确定的。 回归分支 (Box回归分支):负责预测边界框的位置。其通道数 Creg 是基于模型配置和回归任务的复杂性来确定的。 此外,YOLOv8的回归分支采用了DFL(Distribution Focal Loss)策略,将坐标预测视为一个分布而不是一个确定性的单值,这有助于解决边界框不清晰的问题。 搜索结果索引3进一步解释了Head结构的一些细节: C2f结构:在Backbone和Neck中有所不同,增加了跳层连接和Split操作。Anchor-Free:YOLOv8放弃了传统的Anchor Box,转而使用基于多尺度分配的正负样本匹配策略。 YOLOv8模型推理过程YOLOv8的模型推理过程包括图像预处理、模型前向传播和后处理三个主要步骤。 输入图像 通过卷积神经网络CNN 特征提取 区域提议网络RPN 特征图 预测边界框 预测类别 非极大值抑制NMS 输出检测结果在这个流程图中: 输入图像:表示原始图像输入到模型中。通过卷积神经网络(CNN):表示图像通过CNN进行处理。特征提取:表示CNN从图像中提取特征。区域提议网络(Region Proposal Network, RPN):这一步在传统的YOLO模型中不常见,但在某些变体中可能存在,用于生成候选的目标区域。特征图:表示从卷积层输出的特征图,这些特征图用于后续的边界框和类别预测。预测边界框:表示网络预测的边界框坐标。预测类别:表示网络预测的目标类别。非极大值抑制(Non-Maximum Suppression, NMS):表示去除重叠的边界框,保留最佳的预测结果。输出检测结果:表示模型最终的输出,包括目标的类别和边界框。 1. 图像预处理在推理之前,需要对输入图像进行预处理,以满足模型的输入要求。这通常包括图像尺寸调整、归一化等操作。根据搜索结果[3],YOLO V8的预处理步骤与YOLO V5相似,包括Letterbox resize等。 根据您的要求,下面是YOLOv8推理过程之前的图像预处理步骤的流程图。这个流程图包括了图像尺寸调整、归一化等操作,使用了Mermaid语法: 开始 读取原始图像 图像尺寸调整 归一化 处理完成 输入模型进行推理在这个流程图中: 开始:表示预处理流程的开始。读取原始图像:表示加载需要处理的图像。图像尺寸调整:表示将图像调整到模型所需的尺寸,YOLO系列模型通常使用Letterbox resize方法,即保持图像比例的同时填充边缘,使图像尺寸统一。归一化:表示将图像的像素值缩放到0到1之间,或者根据模型训练时的统计数据进行均值和标准差归一化。处理完成:表示预处理步骤已经完成。输入模型进行推理:表示将预处理后的图像输入到YOLOv8模型中进行推理。 2. 模型前向传播输入图像通过模型的Backbone进行特征提取,然后通过Neck进行特征融合,最后在Head部分生成检测结果。YOLOv8通过单次前向传播即可完成所有这些步骤,这也是其能够实现快速推理的关键。 以下是使用Mermaid语法创建的YOLOv8模型前向传播的流程图,展示了从输入图像到生成检测结果的整个流程: 开始 输入图像 通过Backbone 特征提取 通过Neck 特征融合 送入Head 预测边界框和类别 应用阈值过滤 非极大值抑制NMS 输出检测结果 结束在这个流程图中: 开始:表示模型前向传播流程的起始点。输入图像:表示模型接收到的待处理图像。通过Backbone:表示图像通过模型的主干网络进行初步处理。特征提取:表示从图像中提取出有用的特征信息。通过Neck:表示将Backbone的输出传递到Neck部分,进行进一步的特征处理。特征融合:表示Neck部分将不同尺度的特征图进行融合,以增强特征的表达能力。送入Head:表示将融合后的特征图送入Head部分进行最终的预测。预测边界框和类别:表示Head部分预测出目标的边界框和类别。应用阈值过滤:表示移除那些置信度低于预设阈值的预测结果。非极大值抑制(NMS):表示对剩余的预测结果执行NMS操作,以去除重叠的检测框并保留最佳的预测结果。输出检测结果:表示最终的检测结果,包括目标的类别和边界框信息。结束:表示模型前向传播流程的结束。 3. 后处理模型的输出通常包括预测的边界框坐标、类别概率等。后处理步骤包括应用阈值来过滤低置信度的预测,以及使用非极大值抑制(NMS)来去除重叠的检测框。 以下是使用Mermaid语法创建的YOLOv8后处理步骤的流程图,展示了从模型输出到最终检测结果的整个流程: 开始 模型输出预测结果 应用置信度阈值过滤 过滤低置信度预测 非极大值抑制NMS 去除重叠检测框 输出最终检测结果 结束 结语YOLOv8作为目标检测领域的新星,其网络架构和推理过程体现了YOLO系列的最新技术进展。通过精心设计的网络结构和优化的推理流程,YOLOv8在保持实时性的同时,也实现了更高的检测准确率。随着未来研究的深入,YOLOv8有望在更多应用场景中展现其强大的性能。
祝大家实验顺利,有效涨点~ 如果有用欢迎点赞收藏文章!!! 免费资料获取关注博主公众号,获取更多粉丝福利。 |

【本文地址】
今日新闻 |
推荐新闻 |