基于无人机低空摄影测量技术进行矿山大比例尺地形测绘的 可行性研究 |
您所在的位置:网站首页 › 大疆航拍地形图片 › 基于无人机低空摄影测量技术进行矿山大比例尺地形测绘的 可行性研究 |
基于无人机低空摄影测量技术进行矿山大比例尺地形测绘的 可行性研究
|
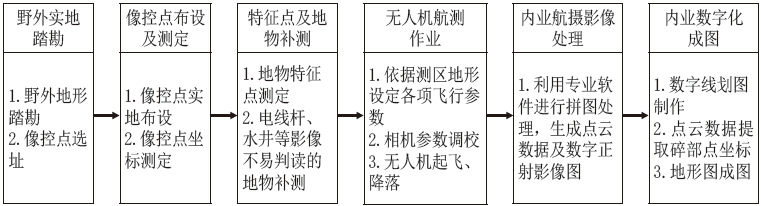
1.1 无人机飞行平台 本文所述的无人机航测平台为深圳市大疆创新科技有限公司生产的大疆精灵4(Phantom-4),该平台的安全飞行高度不高于500 m,续航时间为30 min,作业过程中平均飞行速度为11 m/s,最大飞行速度为20 m/s;相机焦距为20 mm,最大光圈为f/2.8,相机像素为1 200万(4 000×3 000);飞行器起飞载重1.38 kg,起降场地要求较高,最好为平坦的水泥地或其他硬化路面。 1.2 无人机航测作业流程 利用大疆精灵4(Phantom-4)无人机对平顶山市宝丰县孟庄村某采坑进行航空数字摄影测量,采坑东西长约500 m,南北长约900 m,面积共27.96,最高点高程约155.7 m,最低点采坑底部高程约126.0 m。作业区内部有小面积树林和灌木丛,其余均为裸露岩体。航飞作业时天气晴朗,风力约2~3级,日期为2018年10月23日。本次作业的主要工作内容包括测区野外实地踏勘、野外像控点布设及测定、野外特征点及部分地物补测、无人机航测作业、内业航摄影像处理、内业数字化成图等几个步骤,如图1所示。其中野外像控点、特征点以及部分地物的测定采用网络RTK方式,采用的仪器为中海达A12 GNSS RTK,平面坐标系统采用国家2000大地坐标系,高程坐标系采用1985国家高程系统,投影坐标系为高斯投影3°分带,中央子午线为114°,像控点分布情况如图2所示;无人机航测作业前依据测区边界并外扩一定区域作为航测范围,然后设定各项飞行参数后选择合适场地起飞,本次作业各项飞行参数见表1;内业航摄影像处理主要采用Pix4Dmapper Pro 4.3软件进行影像拼图、点云数据及数字正射影像图制作;内业数字化成图首先利用南方CASS 9.0进行数字线划图制作,然后利用QT Modeler处理点云数据,提取测区碎部点三维坐标,最后在南方CASS 9.0中展出并生成等高线。
图1 无人机航摄地形图测绘生产工艺流程 Fig.1 The production process of topographic map with UAV aerial photogrammetry
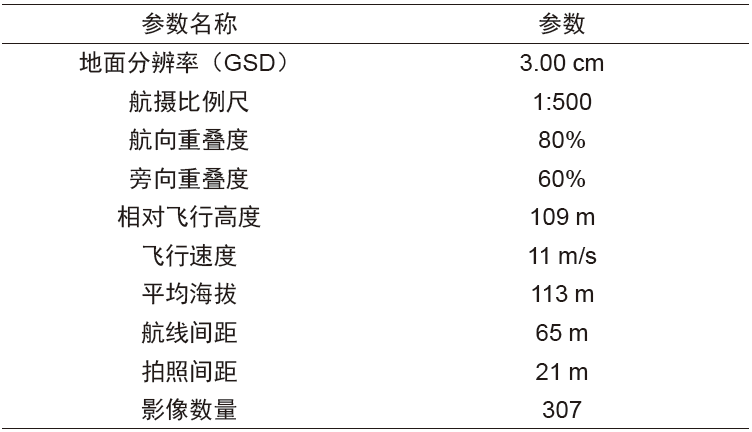
图2 地面像控点空间位置分布图 Fig.2 The spatial positions of image control points 表1 飞行参数 Tab.1 The flight parameters
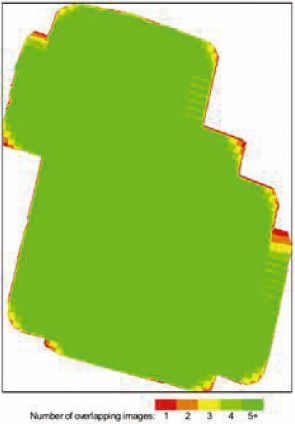
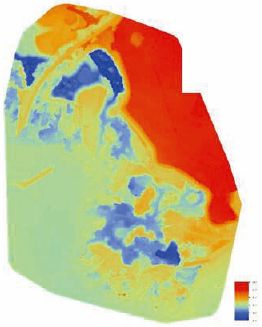
2 数字成图及地形图精度分析 2.1 影像数据处理结果 将外业无人机航拍的影像图及像控点坐标导入到Pix4D mapper Pro 4.3软件中,完成拼图及点云数据处理步骤后,生成正射影像图(DOM)、数字表面模型(DSM)和三维点云数据。图3为航拍影像的重叠度,图中绿色表示该区域有5张及以上照片覆盖;图4为该矿山的数字正射影像图,图5为数字表面模型,图6为QT Modeler软件中打开的三维点云数据,点云密度为61.0个/。
图3 影像重叠度 Fig.3 Degree of overlapping images
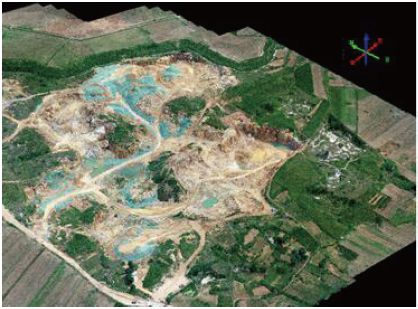
图4 数字正射影像图 Fig.4 Digital orthophoto map
图5 数字表面模型 Fig.5 Digital surface map
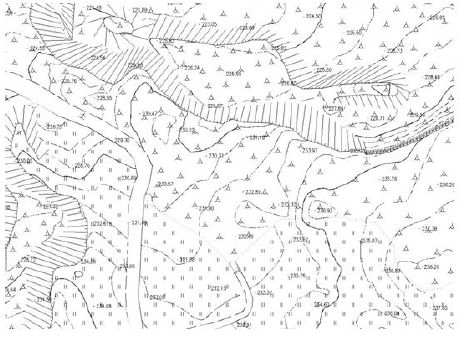
图6 三维点云数据 Fig.6 3D point cloud data 2.2 调绘补测与数字化成图 内业数字化成图采用南方CASS 9.0制作完成,主要依据数字正射影像图及三维点云数据进行数据采集,针对一些在影像及点云数据中无法判读的地物需要在现场补测,比如电线杆、通讯杆、地面上被建筑物或植被遮挡的地物等。地形图高程点由QT Modeler打开点云数据后提取,提取过程中针对地形发生变化比较大的地方,如陡坎、陡崖等,通过增加高程点密度来提高地形的精度。此外,测区范围内树林覆盖区域、建筑物遮挡区域的高程点则由现场实测高程后进行内业补充,确保高程的准确性。高程点提取完成后展到南方CASS 9.0中生成等高线,经过外业补测及内业数字化成图后制作的数字线划图如图7所示。
图7 数字线划图 Fig.7 Digital line graph 2.3 外业检查点精度分析 成果质量检查采用网络RTK进行补测抽查,检查点主要有电线杆或通讯杆、房角、道路交叉处等共42个,另外由于采坑内部特征地物较少,因此另外单独布设了5个像控点作为检查点,检查点基本能均匀覆盖整个测区,可在一定程度上反映测区无人机航测精度。为评价分析无人机低空摄影测量的精度,本文假定利用RTK测量的坐标值为真实值,因此采用平均误差(Mmean )和相对均方根误差(RMSE)两个指标来分别验证无人机航测值的精度与离散程度,具体公式如下:
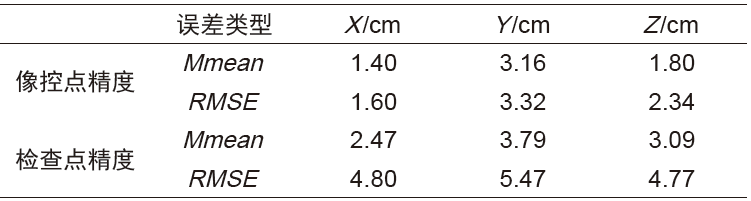
式中,n 代表参与计算的像控点数量;Xi代表该点的无人机航空摄影测量值;Yi代表该点的地面实测值。 数据处理分析后计算结果见表2,从表中可以看出参与影像拼图的像控点精度较高,平面坐标及高程的平均误差和相对均方根误差均在4 cm以内,尤其X 方向精度最高,达到了2 cm以内。未参与计算的地面布设的像控点精度也达到了较高的精度,平面坐标及高程的平均误差和相对均方根误差均在6 cm以内,其中平均误差较小,均在4 cm以内,而相对均方根误差较大,达到了4~6 cm,说明检查点坐标精度较高,但误差分布的离散程度也较高。从表中可以看出,检查点的精度可以满足1:1 000地形图精度的要求,可以为矿山地质环境恢复治理、矿山地质调查等矿山工程项目提供较高的测量精度。 表2 测量点位精度统计结果 Tab.2 The statistical analysis results of the measuring accuracy
3 结束语 本文从作业流程、数字产品制作以及精度验证等方面对利用无人机开展矿山大比例尺地形图测绘工作的可行性进行了详细阐述,得到如下结论: 1)利用无人机在矿山开展低空摄影测量获得了较高的点位精度,可以满足矿山1:1 000数字地形图测绘的平面精度及高程精度的要求。但由于矿山色调单一、风力较大,野外无人机航测作业时仍需要严格按照航测外业规范要求,尽量降低影响无人机航拍影像质量的外界环境因素。 2)目前无人机航拍影像的数据处理软件及方法仍占据大量内业时间,其中测区范围内被建筑物、植被或其他地物遮挡区域的高程仍需要人工实地补测,不能实现点云数据自动剔除,目前市面上有多款软件可以进行点云分类,如Pix4Dmapper、Global Mapper等,但由于矿山地形复杂,地势起伏变化较大,因此点云分类效果并不理想,依旧依赖于人工现场实测。 3)利用无人机开展矿山大比例尺地形图测量不仅可以大大提高测绘工作效率,且矿山中地形环境复杂,对于一些人员或仪器设备无法达到区域利用无人航空摄影测量依然可以达到较高的精度,从而为矿山地质环境恢复治理、工程施工等工作提供效率更高、精度更高、数据产品更加丰富的基础测量服务。 编辑 /安有硕 审核 / 呼慧珊 刘峰返回搜狐,查看更多 |


【本文地址】
今日新闻 |
推荐新闻 |