多项式曲线拟合和最小二乘法 · Sika |
您所在的位置:网站首页 › 多项式拟合优缺点 › 多项式曲线拟合和最小二乘法 · Sika |
多项式曲线拟合和最小二乘法 · Sika
|
多项式曲线拟合和最小二乘法
2018年10月24日
python
算法
最小二乘
曲线拟合
目录
1. 曲线拟合2. 多项式曲线拟合2.1. 建立模型——多项式曲线3. 最小二乘法3.1. 普通最小二乘3.2. Gauss-Markov定理3.3. 最小二乘法与最大似然解4. Python实现5. Reference
曲线拟合
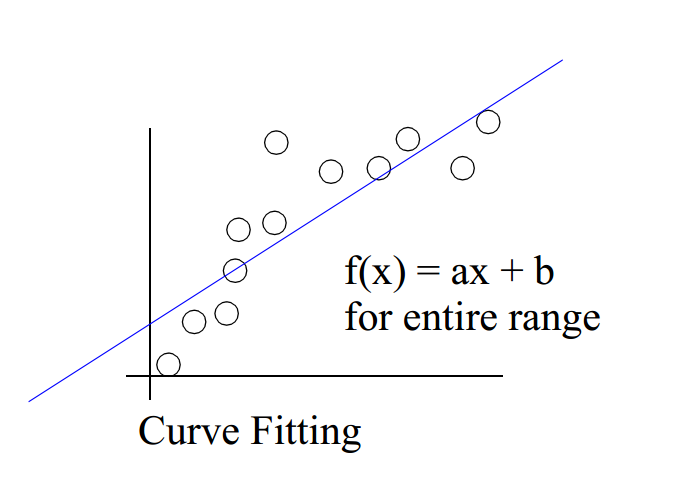
曲线拟合用于查找一系列数据点的“最佳拟合”线或曲线。 大多数情况下,曲线拟合将产生一个函数,可用于在曲线的任何位置找到点。 在某些情况下,也可能不关心找到函数,而是只想使用曲线拟合来平滑数据并改善绘图的外观。 简而言之,曲线拟合就是在受到一定约束条件的情况下,构建可以表示一系列数据点的曲线或数学函数的过程。更加数学化一点的话,对于一个给定的数据集,曲线拟合是以方程形式引入因变量和自变量之间的数学关系的过程。 一般来说,曲线拟合可以认为有以下形式: 平滑 我们使用一个函数来尽可能的表示(即逼近)数据集中点的数据。 逼近 或者如前文所述,我们只想使用曲线拟合来平滑数据并改善绘图的外观。前两种情况下,数据的一般会有相当程度的误差或噪声。 如下所示,为线性拟合:
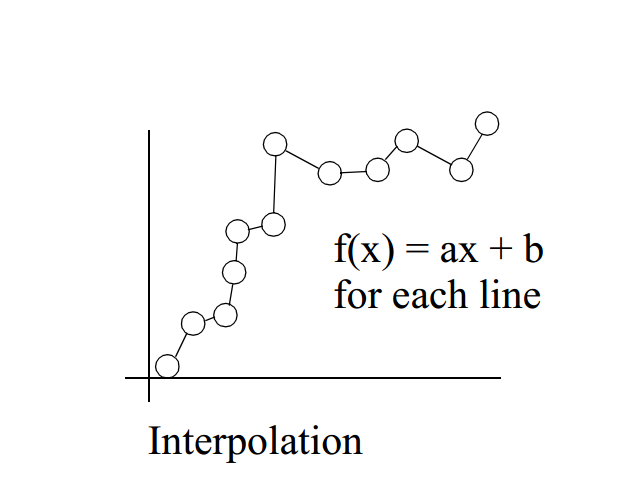
插值 对于给定的数据集,产生一个或多个插值曲线通过数据集的每一个点。这种情况下,我们认为数据点很足够准确的。 如图所示,为线性插值:
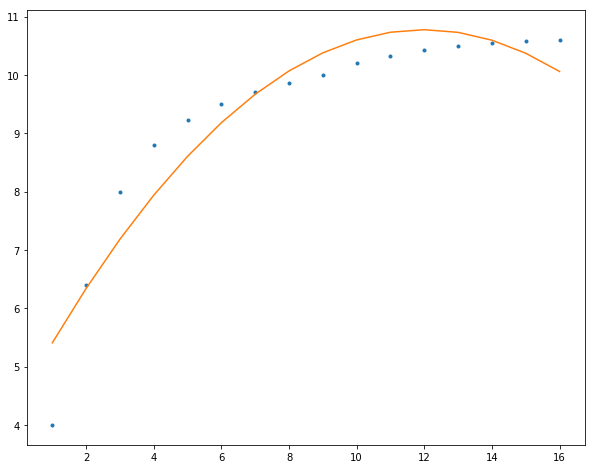
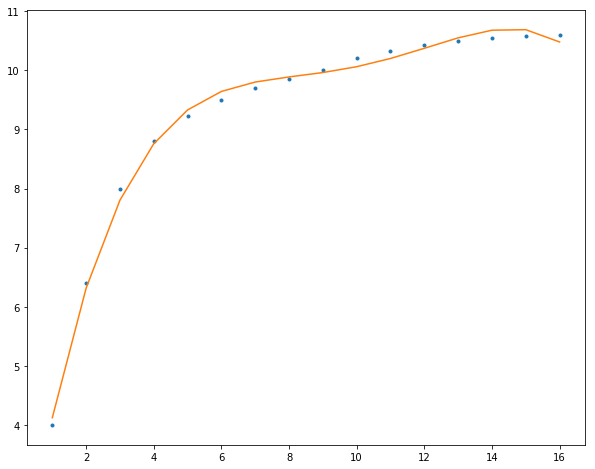
这里我们主要讲述在一定约束条件下,如何用一个函数尽可能的表示(即逼近)数据集中的点。同时,使用基于最小二乘的多项式曲线来拟合数据点。 多项式曲线拟合 建立模型——多项式曲线多项式曲线即为用多项式函数表示的曲线: f(x)=an∗xn+an−1∗xn−1+⋅⋅⋅+a2∗x2+a1∗x+a0f(x)=a_n*x^n+a_{n-1}*x^{n-1}+···+a_2*x^2+a_1*x+a_0 f(x)=an∗xn+an−1∗xn−1+⋅⋅⋅+a2∗x2+a1∗x+a0 f(x)=∑i=0nai∗xif(x)=\sum_{i=0}^{n}{a_i*x^i} f(x)=i=0∑nai∗xi 其中nnn代表多项式函数的阶次(degree)。 当nnn为1时,即为线性函数y=a∗x+by=a*x+by=a∗x+b,nnn为2时,则是二次函数(quadratic function),nnn为3时,自然是三次函数(cubic function)。 这样对于数据集中的nnn个点(x,y)(x,y)(x,y),都有: {y1^(x,w)=w0+w1∗x1+w2∗x12+⋅⋅⋅+wm−1∗x1m−1+wm∗x1my2^(x,w)=w0+w1∗x2+w2∗x22+⋅⋅⋅+wm−1∗x2m−1+wm∗x2m⋮yn−1^(x,w)=w0+w1∗xn−1+w2∗xn−12+⋅⋅⋅+wm−1∗xn−1m−1+wm∗xn−1myn^(x,w)=w0+w1∗xn+w2∗xn2+⋅⋅⋅+wm−1∗xnm−1+wm∗xnm\left\{\begin{matrix} \hat{y_1}(x,w)=w_0+w_1*x_1+w_2*x_1^2+···+w_{m-1}*x_1^{m-1}+w_m*x_1^m \\ \hat{y_2}(x,w)=w_0+w_1*x_2+w_2*x_2^2+···+w_{m-1}*x_2^{m-1}+w_m*x_2^m \\ \vdots \\ \hat{y_{n-1}}(x,w)=w_0+w_1*x_{n-1}+w_2*x_{n-1}^2+···+w_{m-1}*x_{n-1}^{m-1}+w_m*x_{n-1}^m \\ \hat{y_n}(x,w)=w_0+w_1*x_n+w_2*x_n^2+···+w_{m-1}*x_n^{m-1}+w_m*x_n^m \end{matrix}\right. ⎩⎪⎪⎪⎪⎨⎪⎪⎪⎪⎧y1^(x,w)=w0+w1∗x1+w2∗x12+⋅⋅⋅+wm−1∗x1m−1+wm∗x1my2^(x,w)=w0+w1∗x2+w2∗x22+⋅⋅⋅+wm−1∗x2m−1+wm∗x2m⋮yn−1^(x,w)=w0+w1∗xn−1+w2∗xn−12+⋅⋅⋅+wm−1∗xn−1m−1+wm∗xn−1myn^(x,w)=w0+w1∗xn+w2∗xn2+⋅⋅⋅+wm−1∗xnm−1+wm∗xnm 将其写为矩阵形式: Y^=XW\hat{Y}=XW Y^=XW 其中,W= (w_0,w_1,w_2,···,w_{m-1},w_m)^T,为(m+1)×1(m+1)\times 1(m+1)×1的矩阵,XXX为n×(m+1)n\times (m+1)n×(m+1)的矩阵 X=[111⋯1x1x2x3⋯xn⋮⋮⋮⋮⋮x1mx2mx3m⋯xnm]TX=\begin{bmatrix} 1 & 1 & 1 & \cdots & 1\\ x_1 & x_2 & x_3 & \cdots & x_n \\ \vdots & \vdots & \vdots & \vdots & \vdots \\ x_1^m & x_2^m & x_3^m & \cdots & x_n^m \end{bmatrix}^T X=⎣⎢⎢⎡1x1⋮x1m1x2⋮x2m1x3⋮x3m⋯⋯⋮⋯1xn⋮xnm⎦⎥⎥⎤T 自然,我们可以看到随着mmm也就是degreedegreedegree的增大,多项式曲线可以拟合的数据就可以更加复杂。 实际上,我们可以发现多项式曲线拟合所使用的多项式模型,是一个针对非线性函数数据的线性模型。 这样,多项式曲线拟合即可表示为,给定数据集,求近似曲线f(x)f(x)f(x),使得近似曲线和yyy的误差最小。 最小二乘法有了模型,这下我们使用最小二乘法来求解WWW。 对于矩阵方程:Ax=bAx=bAx=b, 根据b∈Rm×1b\in R^{m\times 1}b∈Rm×1, A∈Rm×nA\in R^{m\times n}A∈Rm×n的不同,有以下三种形式: 超定方程 m>nm>nm>n,且AAA和bbb均已知,其中之一或者二者可能存在误差和干扰 盲矩阵方程 均bbb已知,AAA未知 欠定方程 mn。假定bbb存在加性观测误差或噪声,即b=b0+eb=b_0+eb=b0+e,其中b0b_0b0为无误差数据向量,eee为误差向量。 为了抵消误差对矩阵方程的求解的影响,我们引入一校正向量Δb\Delta bΔb,使得b+Δb=b0+e+Δb→b0b+\Delta b=b_0+e+\Delta b\rightarrow b_0b+Δb=b0+e+Δb→b0,从而实现 Ax=b+Δb⇒Ax=b0Ax=b+\Delta b\Rightarrow Ax=b_0 Ax=b+Δb⇒Ax=b0 的转换。也就是说,选择校正向量Δb=Ax−b\Delta b=Ax-bΔb=Ax−b,并使校正向量“尽可能小”,则可以实现无误差的矩阵方程Ax=b0Ax=b_0Ax=b0的求解。 矩阵方程的这一求解思想可以用下面的优化问题描述 minx∣∣Δb∣∣2=∣∣Ax−b∣∣22=(Ax−b)T(Ax−b)\mathop{min}_x ||\Delta b||^2=||Ax-b||^2_2=(Ax-b)^T(Ax-b) minx∣∣Δb∣∣2=∣∣Ax−b∣∣22=(Ax−b)T(Ax−b) 这一方法被称为普通最小二乘(Ordinary least squares, OLS)法,一般称为最小二乘法。 于是,矩阵方程的Ax=bAx=bAx=b的最小二乘解为 x^LS=argminx∣∣Ax−b∣∣22\hat{x}_{LS}=arg\mathop{min}_x||Ax-b||^2_2 x^LS=argminx∣∣Ax−b∣∣22 展开ϕ=(Ax−b)T(Ax−b)\phi =(Ax-b)^T(Ax-b)ϕ=(Ax−b)T(Ax−b)得 ϕ=xTATAx−xTATb−bTAx+bTb\phi = x^TA^TAx-x^TA^Tb-b^TAx+b^Tb ϕ=xTATAx−xTATb−bTAx+bTb 求ϕ\phiϕ相对于xxx的导数,并令结果等于零,则有 dϕdx=2ATAx−2ATb=0\frac{d\phi}{dx}=2A^TAx-2A^Tb=0 dxdϕ=2ATAx−2ATb=0 也就是说,xxx必然满足 ATAx=ATbA^TAx=A^Tb ATAx=ATb 当矩阵Am×nA_{m\times n}Am×n具有不同的秩时,上述方程的解不同: 超定方程(m>nm>nm>n)列满秩时,即rank(A)=nrank(A)=nrank(A)=n 由于ATAA^TAATA非奇异,所以方程有唯一解 xLS=(ATA)−1ATbx_{LS}=(A^TA)^{-1}A^Tb xLS=(ATA)−1ATb 对于不满秩(rank(A) print(np.polyfit(x, y, 3))>>> [ 0.00624491 -0.20371114 2.18193147 2.57208791] 最后,我们使用多项式曲线拟合我们的数据,阶数越高,模型参数更多就可以表示更加复杂的数据: 2阶 12345678f = np.polyfit(x, y, 2)p = np.poly1d(f)yvals = p(x)plt.figure(figsize=(10,8))plt.plot(x, y, '.')plt.plot(x, yvals)plt.show()
3阶
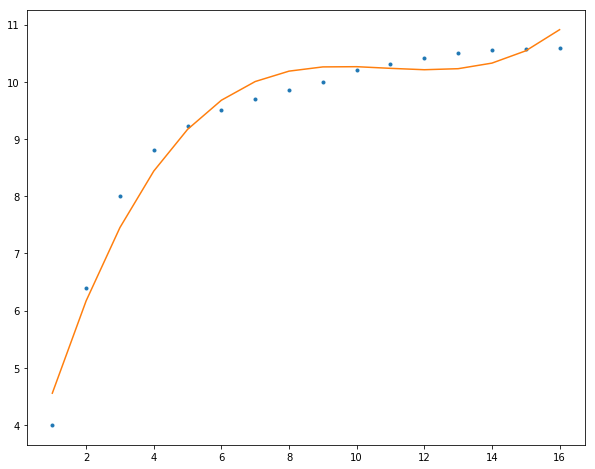
4阶
作者: Sikasjc 链接: http://sikasjc.github.io/2018/10/24/curvefitting/ 知识共享署名-非商业性使用 4.0 国际许可协议 python 算法 最小二乘 曲线拟合 |
【本文地址】
今日新闻 |
推荐新闻 |