泽尼克多项式(Zernike)产生背景与其形式 |
您所在的位置:网站首页 › 多项式函数的阶数 › 泽尼克多项式(Zernike)产生背景与其形式 |
泽尼克多项式(Zernike)产生背景与其形式
|
今天给大家分享一下光学检测中的常用的波面拟合方法-泽尼克多项式拟合的相关知识。这也是我之前做毕业设计时用到的一个工具。以下内容来自均于个人的学习,如有措辞不当,概念不严谨的地方还望各位批评指正,我们一起交流学习,感谢大家。 这系列中后续我会分部分详细讲述。主要讲的有三个内容。 首先,我们讲泽尼克多项式概述。讲清楚该多项式的产生背景、原理以及如何进行波面拟合。 第二是讲该多项式在干涉测量的运用,这一部分将从干涉测量的原理说起,随后说在实际中如何获得拟合所需的数据,以及拟合过程。 最后大体聊一下在matlab中如何编写程序实现泽尼克拟合。 0.引言 在引言中首先我要给大家理清楚几个概念,相信如果能看到这篇文章,你一定听说或多少了解过“光学测量”、“波面拟合”、“泽尼克多项式”这几个概念。 (1)面形: 首先,我们在光学测量中如果要测一个面那需要测的什么,一般需要测的光学元件的面有平面、球面、非球面等,测量的结果一般是这个面的参数或者面形。这里我们主要来看面形,面形是空间中面的三维分布,也就是一个表面的高度分布,我们可以用一个矩阵H(x,y)来表示,如图所示,我们使用一个高度矩阵H就能直观的展示面的形态。 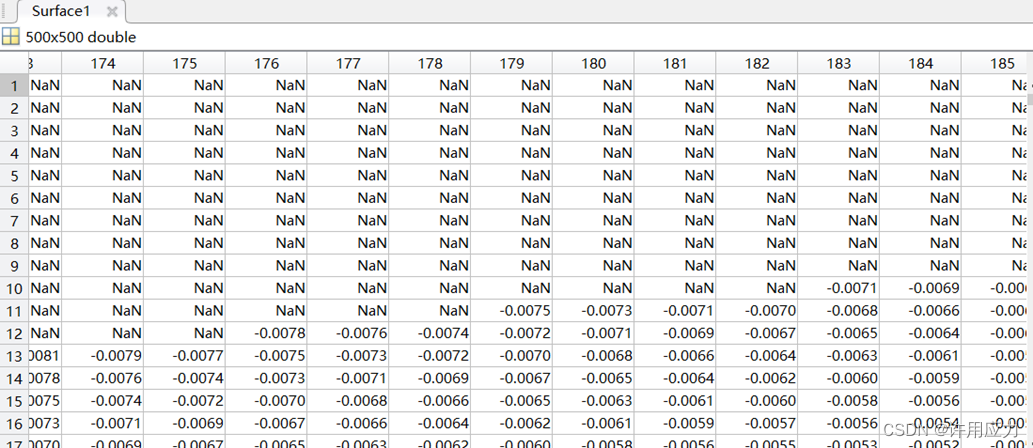 图1 高度矩阵H(x,y)的左上部分
图1 高度矩阵H(x,y)的左上部分
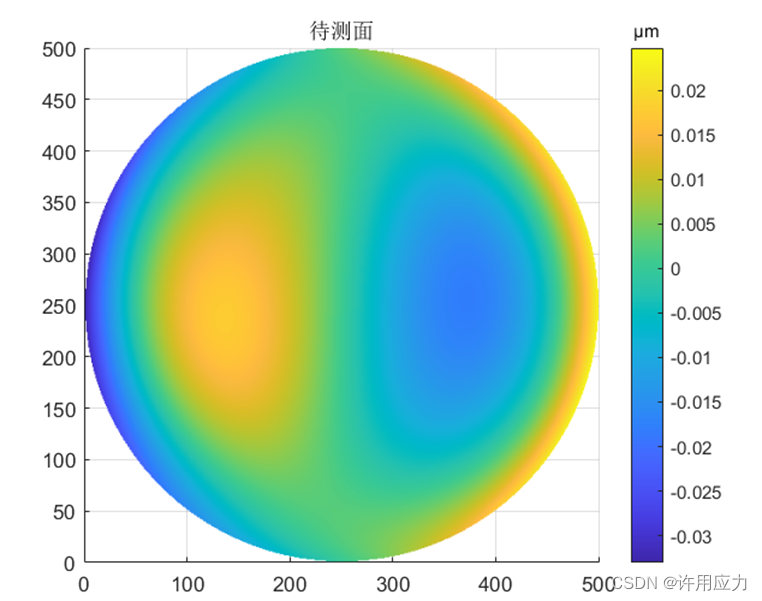 图2 H(x,y)的面形信息
图2 H(x,y)的面形信息
(2)拟合 何为“拟合”,拟合就是将我们获得的面的离散数据计算表示成一个连续的面形分布函数Z(x,y)。如果做过大学物理实验,我们想必对使用一对二维散点拟合直线不陌生。形象的说,拟合就是把平面上一系列的点,用一条光滑的曲线连接起来。因为这条曲线有无数种可能,从而有各种拟合方法。拟合的曲线一般可以用函数表示,根据这个函数的不同有不同的拟合名字。 而现在我们所尝试的三维拟合就是尝试去拟合一个与所求面最接近的理想波面,这才能完成我们波面测量的目的。  图3 二维直线拟合
图3 二维直线拟合
泽尼克多项式是如何实现面的拟合的?先抛开其真正原理不谈,我们可以先将泽尼克多项式视为圆域上的无穷多个形态不一的三维面。这些三维面它就长这样,我们给这些三维面分别编一个号,然后呢,给它乘以一个系数,也就是我们所说的权重,然后将这些三维面与权重的乘积进行线性相加,这样我们就可以用这样的一个形式来表示一个面,理论上说,只要改变不同的系数,就可以得到不同的面。实际运用中,我们只需要计算泽尼克多项式各项的系数,就可以得到我们要拟合的这个面。计算方法会在后续部分中讲到。
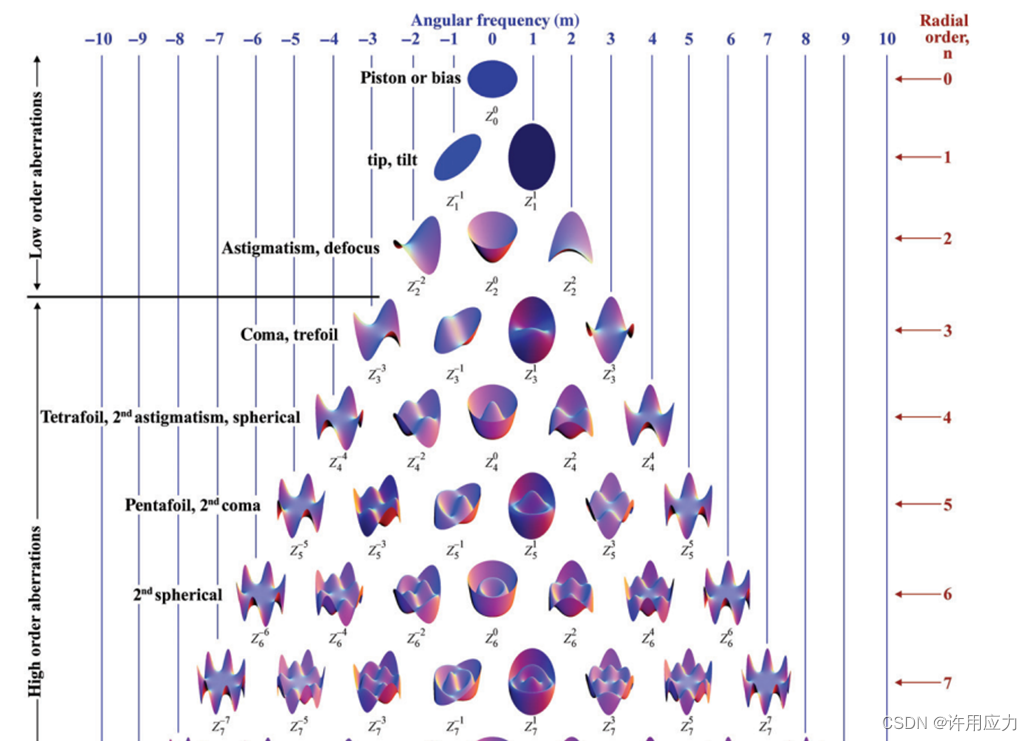 图4 前36项泽尼克多项式
图4 前36项泽尼克多项式
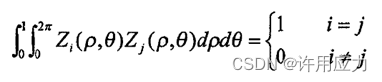
1.泽尼克多项式概述 (1)背景: 光学成像系统通常有一个旋转对称轴,并且光瞳通常是圆形或环形。所以用一组圆域上的幂级数或一组完整的正交多项式来表示一个波面是自然合理的。 泽尼克多项式拟合法是一种模式法波前重建方法。模式法假设待测波前可以用一组基函数拟合得到。 在1934年,F.zernike在研究刀口检验法和相衬法时首次提出了泽尼克多项式这个概念并作了初步探讨,后来是A.B.Bhatia和E.Wolf推导出了泽尼克多项式。 泽尼克多项式有以下几个优点: a.泽尼克多项式在单位圆或波面边界上正交
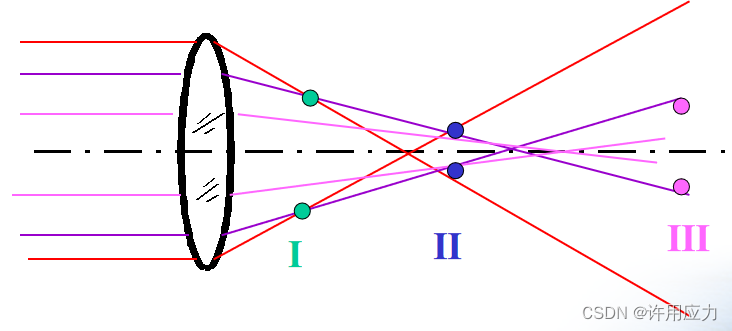
函数正交的数学意义是在域上两个不同项乘积的积分为零。 正交的好处每一项不互相影响,因此増加或减少多项式项数并不影响其它项的系数。 b.多项式拥有转对称性 ,即函数或波面绕圆心旋转时,多项式的数学表示不变,因而有良好的收敛性。 c.泽尼克多项式项式与光学测试中所测得的像差具有相同形式,容易建立联系,方便进行误差分析和误差消除。 其中像差是:光学成像系统在实际成像过程中,因系统本身的非理想特征,而使光线在经系统各面的传输过程中的路线出现偏差,进而形成各类像差,使成像结果表现不佳。像差是对光学系统成像质量的重要评价指标,对其校正是光学系统设计中非常关键的环节,一般来说,像差可分为球差、慧差、畸变、场曲、像散、位置色差和倍率色差七种,可以根据对其每种像差分析建立数学模型,并以此作为像差函数,该类函数还可展开为幂级数或一组正交多项式。 我们挑一个出来简单介绍一下,这是球差,级不同孔径对理想像点的位置之差:
图5 球差 实际中单正透镜产生负球差,单负透镜产生正球差。 综上,泽尼克多项式是一个很好的光学波面拟合工具,下面我们来看它的形式。 3.形式: (1)多项式形式 研究泽尼克拟合方法时,我们常考虑的光学系统是: a,光瞳为圆形,b,没有旋转对称轴。 这种系统的多项式是比较泛用的,其像差函数通常含有cosmθ和sinmθ项。 对于一个在极坐标系下的波面W(ρ,θ)(也就是我们之前提到过的高度矩阵),可以把它写成展开为泽尼克多项式的形式:
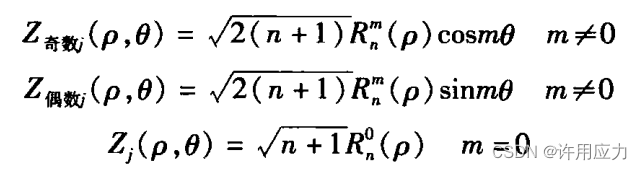
其中Zj(ρ,θ)为第j项泽尼克多项式。aj为该项的泽尼克多项式系数。 多项式可以写成如下形式,该多项式可以分为三部分:ρ项、cos项、sin项。
其中径向多项式Rnm(ρ)
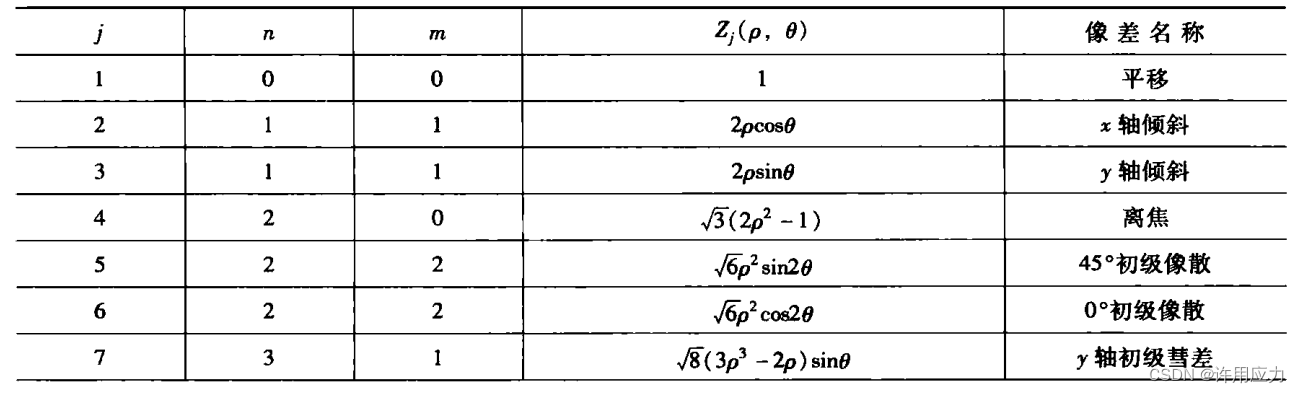
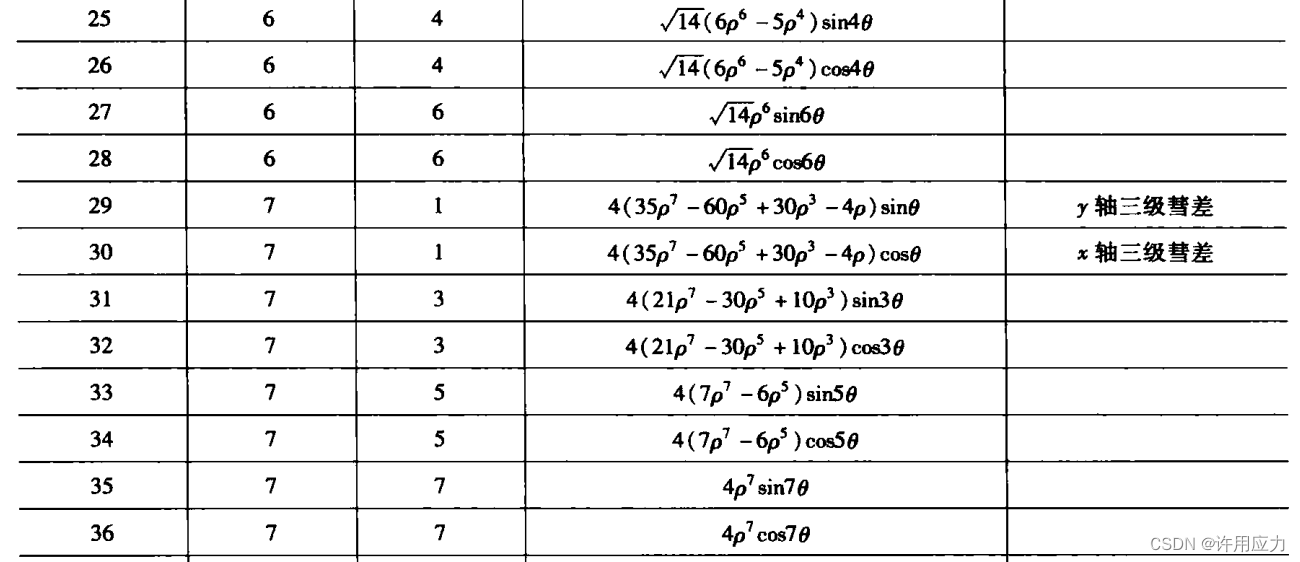
参数j是多项式阶数并且是n和m的函数。n和m是含零正整数,并且n-m≥0且为偶数。参数n表示多项式最高阶 但是使用时我们不需要纠结具体的推导和总体公式形式,之后我们直接看每一项的具体形式。对此推导感兴趣的朋友可以翻阅《光学车间检测》和相关论文。 需要注意的是,泽尼克多项式在圆形光瞳上是正交的,在矩形域和有中心遮拦的环形光瞳上直接转换使用时,不再满足正交条件,需要再进行正交化。 (2)泽尼克多项式的序列 泽尼克多项式有很多套表达方式,其实就是我们给每一项的编号不同,其顺序和系数会有所改变。这是由于改变公式中不同n和m的排列方式造成的,不同的泽尼克多项式排列称为不同的序列,常用的有以下几个序列: Fringe Zernike 条纹泽尼克 (常用于干涉测量,如Zygo) Standard Zernike 标准泽尼克 (Zemax) Noll Zernike (常用于大气测量) OSA Zernike(人眼像差) 这里我们来看一下《光学车间检验》里Standard Zernik e序列的前36项具体形式:
从具体形式看该序列是径向多项式增大,从而cos项和sin项的方位角频率m再增大的排列。 (3)泽尼克像差与赛德尔像差的关系 泽尼克多项式是一套独特的像差体系,可以将多项式称为泽尼克像差。 泽尼克像差和赛德尔像差不是单纯的系数转换关系。一个赛德尔像差由多个泽尼克像差构成,一个泽尼克像差也由多个赛德尔像差构成。例如泽尼克彗差 我们来看一下单项泽尼克像差的几何含义:
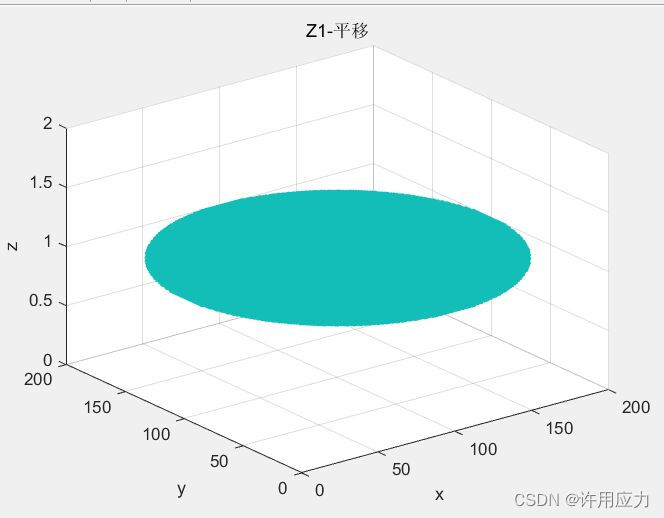 图6 平移
图6 平移
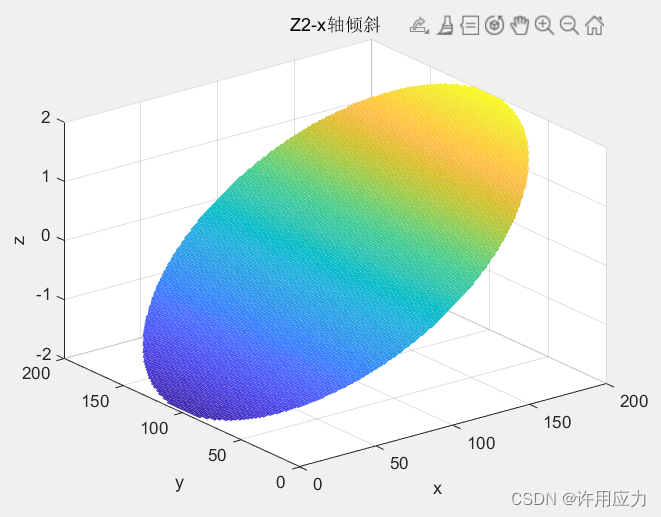 图7 x轴倾斜
图7 x轴倾斜
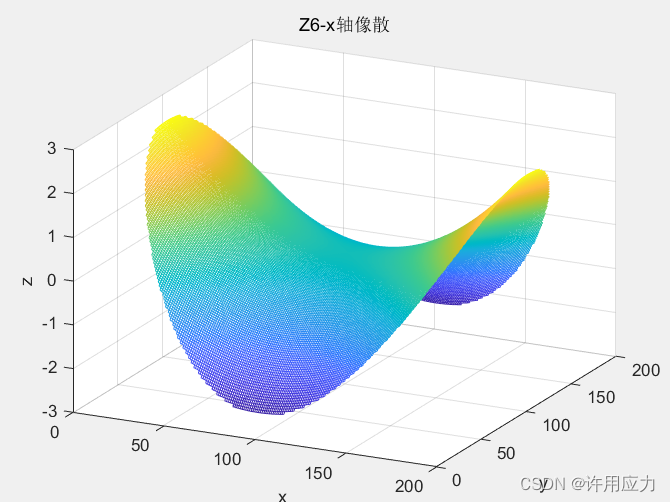 图7 像散
图7 像散
参考文献(不正规的写法): [1] 百度百科-拟合 [2]Vasudevan Lakshminarayanan & Andre Fleck (2011) Zernike polynomials: a guide, Journal of Modern Optics, 58:7, 545-561, DOI: 10.1080/09500340.2011.554896 [3] 蔡慧娟.基于共轭差分法的光学平面面形绝对测量的关键技术研究[D].南京:南京理工大学, 2016. [4] 翟天保Steven.光学算法——Zernike拟合-CSDN [5] 李林,黄一帆.应用光学[M].北京:北京理工大学出版社,2017.1 [6] 光学车间检验(参考书,懒得去查形式了) |



【本文地址】