常见的图像几何变换 |
您所在的位置:网站首页 › 图像旋转方法有哪几种 › 常见的图像几何变换 |
常见的图像几何变换
|
文章目录
旋转平移缩放镜像转置错切(倾斜)刚体变换相似变换仿射变换投影变换
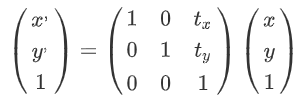
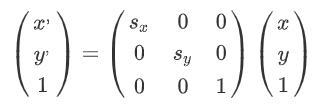
图像的几何变换又称为图像空间变换, 它将一幅图像中的坐标位置映射到另一幅图像中的 新坐标位置。常见的几何变换包括旋转、平移、缩放、镜像、转置、错切等,以及几种组合变换,如刚体变换、仿射变换、单应变换
旋转
( x , y , ) = ( c o s ( θ ) − s i n ( θ ) s i n ( θ ) c o s ( θ ) ) ( x y ) \left(\begin{matrix} x^,\\y^, \end{matrix}\right) = \left(\begin{matrix} cos(θ) & -sin(θ)\\ sin(θ) & cos(θ) \end{matrix}\right) \left(\begin{matrix} x\\y \end{matrix}\right) (x,y,)=(cos(θ)sin(θ)−sin(θ)cos(θ))(xy) 式中,θ表示旋转角(PS:如果是单坐标系,表示将点逆时针旋转;如果是两个坐标系转换,表示坐标系逆时针旋转,点顺时针旋转)。 M = cv2.getRotationMatrix2D((img.shape[1]*0.5, img.shape[0]*0.5), 30, 1) img_dst = cv2.warpAffine(img, M, (width, height))
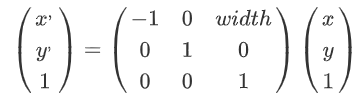
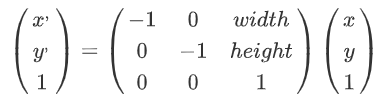
图像的镜像变换,包括水平镜像、垂直镜像和对角镜像。 水平镜像:
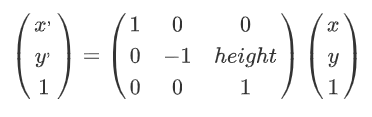 M = np.float32([[1, 0, 0], [0, -1, height]])
img_dst = cv2.warpAffine(img, M, (img.shape[1], img.shape[0]))
M = np.float32([[1, 0, 0], [0, -1, height]])
img_dst = cv2.warpAffine(img, M, (img.shape[1], img.shape[0]))
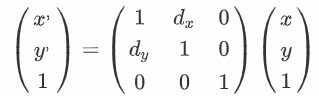
d x = t a n ( θ ) d~x~ =tan(θ) d x =tan(θ), d y = 0 d~y~ =0 d y =0 沿着X方向错切 d x = 0 d~x~ =0 d x =0, d y = t a n ( θ ) d~y~ =tan(θ) d y =tan(θ) 沿着Y方向错切 M = np.float32([[1, np.tan(0.1), 0], [0, 1, 0]]) img_dst = cv2.warpAffine(img, M, (img.shape[1], img.shape[0]))
x , = ( R ⃗ T ⃗ ) x x^,= \left(\begin{matrix} \vec{R} & \vec{T} \end{matrix}\right)x x,=(R T )x 相似变换 相似变换包括旋转、平移变换,增加了均匀的缩放,4个自由度点之间的距离变化,但是比例保持不变,保角性。x , = ( s R T 0 ⃗ 1 ) x x^,=\left(\begin{matrix} sR & T \\ \vec{0} & 1 \end{matrix}\right)x x,=(sR0 T1)x 仿射变换 仿射变换包括旋转(两个方向)、平移变换、缩放变换(两个尺度)、倾斜(错切)变换、翻转变换,6个自由度,没有保持保角性和点距比值,但是具有保持平行性。保持平直性和平行性,但是角度会变二维坐标到二维坐标之间的线性变换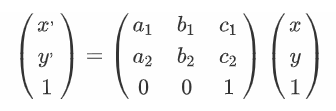 src_point = np.float32([[526, 233],[1010, 411],[499, 1217]])
dst_point = np.float32([[92, 408],[628, 252],[972, 1058]])
warp_mat = cv2.getAffineTransform(src_point, dst_point)
img1_warp = cv2.warpAffine(img1, warp_mat, (img1.shape[1], img1.shape[0]))
src_point = np.float32([[526, 233],[1010, 411],[499, 1217]])
dst_point = np.float32([[92, 408],[628, 252],[972, 1058]])
warp_mat = cv2.getAffineTransform(src_point, dst_point)
img1_warp = cv2.warpAffine(img1, warp_mat, (img1.shape[1], img1.shape[0]))
|


![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-PRwO35Uy-1628429086477)(en-resource://database/2127:1)]](https://img-blog.csdnimg.cn/a02c085b21b14c939f58ac895ee83eb0.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3UwMTA4ODE1NzY=,size_16,color_FFFFFF,t_70)
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-4VqYb2T4-1628429086478)(en-resource://database/2129:1)]](https://img-blog.csdnimg.cn/cb1f59f9500f4a378a210607916b550f.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3UwMTA4ODE1NzY=,size_16,color_FFFFFF,t_70)
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-yCrceqJJ-1628429086479)(en-resource://database/2131:1)]](https://img-blog.csdnimg.cn/80eb04c8da2747cc8ddb6cd8aa0e205b.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3UwMTA4ODE1NzY=,size_16,color_FFFFFF,t_70)
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-YVLLOaVi-1628429086480)(en-resource://database/2133:1)]](https://img-blog.csdnimg.cn/2d07fb54e6304b5a8d8620f813d544b9.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3UwMTA4ODE1NzY=,size_16,color_FFFFFF,t_70)
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-eIcE36Dk-1628429086480)(en-resource://database/2135:1)]](https://img-blog.csdnimg.cn/a06ae524a2b44bbfacc41fea5bd6100f.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3UwMTA4ODE1NzY=,size_16,color_FFFFFF,t_70)
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-oVPIXFTH-1628429086481)(en-resource://database/2137:1)]](https://img-blog.csdnimg.cn/3c0377939b03497cbae851829d6b0723.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3UwMTA4ODE1NzY=,size_16,color_FFFFFF,t_70)
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-KbJHK3Lv-1628429086482)(en-resource://database/2139:1)]](https://img-blog.csdnimg.cn/6ee25208395d46feb6bf9c40465e91f4.png)
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-sENryQez-1628429086482)(en-resource://database/2141:1)]](https://img-blog.csdnimg.cn/c493cbb9fbc9414a8dae5a0ad439d65e.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3UwMTA4ODE1NzY=,size_16,color_FFFFFF,t_70)
【本文地址】
今日新闻 |
推荐新闻 |