深度学习中常见卷积(普通卷积、1×1卷积、转置卷积、可分离卷积、膨胀(空洞)卷积、3D卷积) |
您所在的位置:网站首页 › 图像卷积有什么用 › 深度学习中常见卷积(普通卷积、1×1卷积、转置卷积、可分离卷积、膨胀(空洞)卷积、3D卷积) |
深度学习中常见卷积(普通卷积、1×1卷积、转置卷积、可分离卷积、膨胀(空洞)卷积、3D卷积)
|
总是在网络上看到各种名词的卷积,但是有搞不懂是什么含义,于是结合网上查阅的资料,总结一下。目前比较常用的卷积主要有常规的卷积、1×1卷积、转置卷积、可分离卷积、膨胀卷积、3D卷积。 以下是一些可参考的链接: https://cloud.tencent.com/developer/article/1413083 https://zhuanlan.zhihu.com/p/267249291 https://www.cnblogs.com/gshang/p/13548561.html https://blog.csdn.net/kangzengxin/article/details/103113839 https://www.bilibili.com/video/BV1mh411J7U4?spm_id_from=333.999.0.0 https://blog.csdn.net/qq_30241709/article/details/88080367 https://blog.csdn.net/lanadeus/article/details/82534425 https://www.zhihu.com/question/56024942 普通卷积普通卷积大家应该都比较熟悉了,如果不熟悉的话,可以参考我之前的博客,或者去网上自行百度。这里主要想补充两个知识点。一:卷积核参数量怎么算? 二:如何高效的并行运算卷积滑窗? 卷积核参数量怎么算? 假设现在有一张单通道的灰度图,卷积核大小是3×3,输出通道是10。那么参数量就是3×3×1×10 假设现在有一张三通道的彩色图,卷积核大小是3×3,输出通道是10。那么参数量就是3×3×3×10 因此要搞清楚一个概念:不是一个卷积核对三个通道做运算,而是三个卷积核对三通道做运算(即每个卷积核只对一个通道运算)。因此一幅图有3个通道,就需要3个卷积核,每个卷积核大小又是3×3,这3个卷积核对3个通道计算完后,会合并成一张新的图(把原先这3个通道分别运算的结果,再加起来,合成一个新通道),因此输出通道是10,因此就需要重复10次这样的过程。也就是再×10。 下面这2个图很生动的说明了,好好体会。
我们计算卷积时,不可能一张张滑动吧,原理是这个原理,但是要考虑GPU并行运算啊,一张张滑动,那么运算就太慢了,所以在实际的程序里是将其转换为矩阵的形式并行处理。什么意思呢,看下面这张图。 1×1卷积很常见的,比如在Resnet中。它通常有两个作用, 降维( dimension reductionality )。比如,一张500 * 500且厚度depth为100 的图片在20个filter上做1*1的卷积,那么结果的大小为500×500×20。就是改变了输入和输出的通道数,可以减少参数。增加非线性。卷积层之后经过激励层,1*1的卷积在前一层的学习表示上添加了非线性激励( non-linear activation ),提升网络的表达能力;很明显,增加了非线性,因为相当于又进行了一次运算呗。 可分离卷积任何看过MobileNet架构的人都会遇到可分离卷积(separable convolutions)这个概念。但什么是“可分离卷积”,它与标准的卷积又有什么区别?可分离卷积主要有两种类型:空间可分离卷积和深度可分离卷积。 空间可分离卷积: 将一个卷积核分为两部分(降低计算复杂度,但并非所有的卷积核都可以分,如下图,必须得合适才行)最常见的情况是将3x3的卷积核划分为3x1和1x3的卷积 核,例如在Inception V3中就用到了,如下所示: 深度可分离卷积,其实只对常规卷积做了一个很小的改动,但是带来的确是参数量的下降,这无疑为网络的轻量化带来了好处。深度可分离卷积主要分为两部分:逐通道卷积(Depthwise Convolution)、逐点卷积(pointwise) 逐通道卷积是在空间特征融合,逐点卷积是在通道特征融合(通过1*1卷积将通道之间的关系连接了起来) 1、假设输入通道数是3,第一步用三个卷积和对三个通道分别做卷积,这样在一次卷积后,输出3个数。(回想一下常规卷积方法,也是用三个卷积核对三个通道分别做卷积,但是会将这三个卷积的结果合成一个新通道,并切进而将这一步骤重复N次,N就是输出通道数) 2、这输出的三个数,再通过一个1x1x3的卷积核(pointwise核),得到一个数。 思考:卷积神经网络里面是否遇到卷积层就可以用可分离卷积替代? depthwise separable convolution,相当于是将空间特征学习和通道特征学习分开的过程。 也就是这里带来的假设是这批数据的空间位置高度相关,但不同通道之间相互独立,那么这么做是有积极意义的,并且在参数量减少很多的情况下,获得性能更好的模型。但我个人认为如果数据非上面所说的性质,那么dsc不一定会有好的效果。 膨胀(空洞、扩张)卷积 扩张卷积(Dilated Convolution)也被称为空洞卷积或者膨胀卷积,是在标准的卷积核中注入空洞,以此来增加模型的感受野(reception field)。相比原来的正常卷积操作,除了卷积核大小,步长和填充外,扩张卷积多了一个参数: dilation rate,指的是卷积核的点的间隔数量,比如常规的卷积操作dilatation rate为1。扩张的卷积为卷积层引入另一个参数,称为扩张率。这定义了卷积核中值之间的间距。扩张率为2的3x3内核与5x5内核具有相同的视野,而仅使用9个参数。想象一下,获取一个5x5内核并删除每一个第二列和第二行(间隔删除)。 这就在不丢失特征分辨率的情况下扩大了感受野,进而对检测大物体有比较好的效果。所以总的来说,空洞卷积主要作用:不丢失分辨率的情况下扩大感受野;调整扩张率获得多尺度信息。但是对于一些很小的物体,本身就不要那么大的感受野来说,这就不那么友好了。 Dilated Convolution存在的问题: 1、Dilated Convolution的kernel并不连续,也就是并不是所有的像素都用来计算了,因此这里将信息看作checker-board的方式将会损失信息的连续性。(即栅格效应,膨胀卷积不能覆盖所有的图像特征) 2、Dilated Convolution的设计更像是用于获取long-range information,这样或许对一些大物体有较好的分隔效果,而对于小物体来说可能是有弊无利了。如何同时处理好大小物体的关系,则是设计好dilated convolution网络的关键。 转置卷积转置卷积又叫反卷积、逆卷积。不过转置卷积是目前最为正规和主流的名称,因为这个名称更加贴切的描述了卷积的计算过程,而其他的名字容易造成误导。因此,以后统一叫做转置卷积,而不是反卷积。 那么转置卷积和反卷积的区别在哪里?转置卷积只是将形状变回去了,但是数值变不回去;反卷积是指形状数值都变回去了。 我们先从转置卷积的用途来理解下,转置卷积作用是上采样(由少变多),通常用于几个方面: 1、CNN可视化,通过反卷积将卷积得到的feature map还原到像素空间,来观察feature map对哪些pattern相应最大,即可视化哪些特征是卷积操作提取出来的; 2、FCN全卷积网络中,由于要对图像进行像素级的分割,需要将图像尺寸还原到原来的大小,类似upsampling的操作,所以需要采用反卷积,用于语义分割; 3、GAN对抗式生成网络中,由于需要从输入图像到生成图像,自然需要将提取的特征图还原到和原图同样尺寸的大小,即也需要反卷积操作。 转置卷积的步骤: 3D卷积的对象是三维图像,因此卷积核变成了depth×height×width,简写为D × H × W 多通道的3D卷积核shape为D × H × W × Channels Channels就是输出的通道数(滤波器的个数) 比如说一下子是10帧,10张RGB图片,每张提取出RGB三个通道,如下图所示,比如通道1中是10个图片的R,通道2是10个图片的G,通道3是10个图片的B,然后这些分别与3D卷积核做运算,运算后得到3个结果嘛,3个结果再求和累加起来。其实过程和2D的差不多(回想,2D其实也是RGB,只不过每个RGB通道只有一张图)。 |
 输入是3个channels,输出是4个channels,然后把原先这3个通道分别运算的结果,再加起来,合成一个新通道。
输入是3个channels,输出是4个channels,然后把原先这3个通道分别运算的结果,再加起来,合成一个新通道。 输入一个4×4的图片,卷积核是3×3,那么每次就有一部分取不到,取不到的那部分就用0代替,如上图的红黄绿紫矩阵。把这四个矩阵拉成向量,就如下图所示,将输入的图片拉成向量,将卷积核及补0的图片也拉成向量,然后就可以当成一个矩阵运算了,这样运算效率就高了。
输入一个4×4的图片,卷积核是3×3,那么每次就有一部分取不到,取不到的那部分就用0代替,如上图的红黄绿紫矩阵。把这四个矩阵拉成向量,就如下图所示,将输入的图片拉成向量,将卷积核及补0的图片也拉成向量,然后就可以当成一个矩阵运算了,这样运算效率就高了。  假设本来是4×4是输入图片,就被拉成了1×16,然后卷积核及补零后,也被拉成了16维,总共有4组(总共可以滑动4次),所以就成了上图这样。这就是实际计算的方法,因为计算时不可能用一张张滑动的方式,这样太低效了。
假设本来是4×4是输入图片,就被拉成了1×16,然后卷积核及补零后,也被拉成了16维,总共有4组(总共可以滑动4次),所以就成了上图这样。这就是实际计算的方法,因为计算时不可能用一张张滑动的方式,这样太低效了。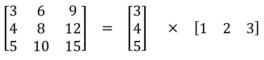 普通的3x3卷积在一个5x5的feature map上的计算方式如下图,每个位置需要9此惩罚,一共9个位置,整个操作要81次做乘法:
普通的3x3卷积在一个5x5的feature map上的计算方式如下图,每个位置需要9此惩罚,一共9个位置,整个操作要81次做乘法:  同样的状况在空间可分离卷积中的计算方式如下图,第一步先使用3x1的filter,所需计算量为:15x3=45;第二步使用1x3的filter,所需计算量为:9x3=27;总共需要72次乘法就可以得到最终结果,要小于普通卷积的81次乘法。
同样的状况在空间可分离卷积中的计算方式如下图,第一步先使用3x1的filter,所需计算量为:15x3=45;第二步使用1x3的filter,所需计算量为:9x3=27;总共需要72次乘法就可以得到最终结果,要小于普通卷积的81次乘法。 
 假设输出通道是4,常规卷积的参数个数为: N_std = 4 × 3 × 3 × 3 = 108 Separable Convolution的参数由两部分相加得到: N_depthwise = 3 × 3 × 3 = 27 N_pointwise = 1 × 1 × 3 × 4 = 12 N_separable = N_depthwise + N_pointwise = 39
假设输出通道是4,常规卷积的参数个数为: N_std = 4 × 3 × 3 × 3 = 108 Separable Convolution的参数由两部分相加得到: N_depthwise = 3 × 3 × 3 = 27 N_pointwise = 1 × 1 × 3 × 4 = 12 N_separable = N_depthwise + N_pointwise = 39 上图左侧为对0-9共10颗像素的正常3x3卷积,padding为same,stride=1的情况下,我们知道其卷积后共得到10个特征,每个特征的感受野均为3x3,如左侧红色的那个特征覆盖3,4,5三颗像素(想象二维情况下应该是3x3)。 上图右侧为对0-9共10颗像素的空洞3x3卷积,这里的3x3是指有效区域,在padding为same,stride=1的情况下,也得到了10个特征,但是每个特征的感受野为5x5,如右侧蓝色的那个特征覆盖2,3,4,5,6五颗像素(想象二维情况下应该是5x5)。 下面两张图解释了标准卷积(Standard Convolution)和膨胀卷积(Dilated Convolution)之间的区别(膨胀卷积是间隔取点的):
上图左侧为对0-9共10颗像素的正常3x3卷积,padding为same,stride=1的情况下,我们知道其卷积后共得到10个特征,每个特征的感受野均为3x3,如左侧红色的那个特征覆盖3,4,5三颗像素(想象二维情况下应该是3x3)。 上图右侧为对0-9共10颗像素的空洞3x3卷积,这里的3x3是指有效区域,在padding为same,stride=1的情况下,也得到了10个特征,但是每个特征的感受野为5x5,如右侧蓝色的那个特征覆盖2,3,4,5,6五颗像素(想象二维情况下应该是5x5)。 下面两张图解释了标准卷积(Standard Convolution)和膨胀卷积(Dilated Convolution)之间的区别(膨胀卷积是间隔取点的): 

 这张是普通卷积的运算示意图,可以看见 I×C=O,我们是已经知道了I和C,求O;那么我们做转置卷积的时候,两边直接乘C的逆矩阵不就行了吗,就可以反推出I了呗?可是这样有个前提,逆矩阵必须是方阵才行,明显这个C不一定是方阵。
这张是普通卷积的运算示意图,可以看见 I×C=O,我们是已经知道了I和C,求O;那么我们做转置卷积的时候,两边直接乘C的逆矩阵不就行了吗,就可以反推出I了呗?可是这样有个前提,逆矩阵必须是方阵才行,明显这个C不一定是方阵。  虽然求不了逆矩阵,但是我们可以求C的转置矩阵呀,如下图
虽然求不了逆矩阵,但是我们可以求C的转置矩阵呀,如下图  因此就变成了O跟每一列去求,
因此就变成了O跟每一列去求, 
 可参考这篇https://blog.csdn.net/lanadeus/article/details/82534425 https://www.bilibili.com/video/BV1mh411J7U4?spm_id_from=333.999.0.0
可参考这篇https://blog.csdn.net/lanadeus/article/details/82534425 https://www.bilibili.com/video/BV1mh411J7U4?spm_id_from=333.999.0.0
【本文地址】
今日新闻 |
推荐新闻 |