基于STM32的四旋翼无人机项目(二):MPU6050姿态解算(含上位机3D姿态显示教学) |
您所在的位置:网站首页 › 四旋翼pid调试 › 基于STM32的四旋翼无人机项目(二):MPU6050姿态解算(含上位机3D姿态显示教学) |
基于STM32的四旋翼无人机项目(二):MPU6050姿态解算(含上位机3D姿态显示教学)
|
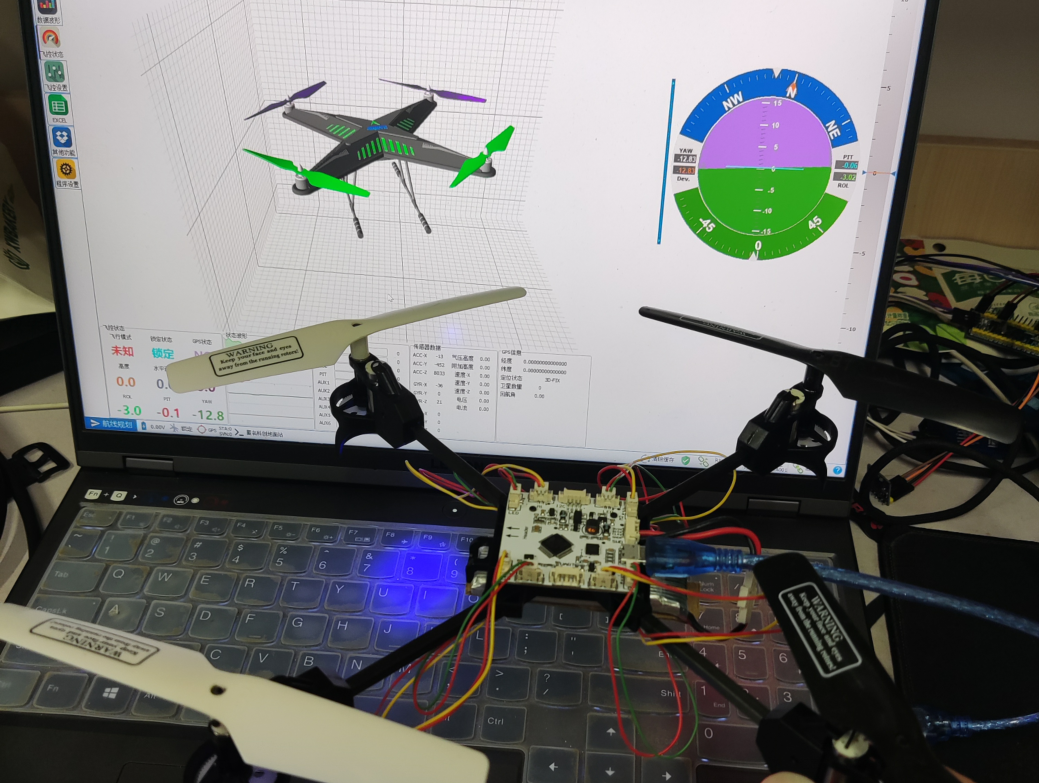
前言:本文为手把手教学飞控核心知识点之一的姿态解算——MPU6050 姿态解算(飞控专栏第2篇)。项目中飞行器使用 MPU6050 传感器对飞行器的姿态进行解算(四元数方法),搭配设计的卡尔曼滤波器与一阶低通滤波器进行数据滤波。当然,本篇博客也将为读者朋友教学业内匿名者上位机的代码移植和使用方法。为了方便读者朋友学习,本博客将使用传感器模块替代整机进行教学,方便读者朋友后续根据自己实际情况移植!(文末有代码开源!) 实验硬件: STM32F103C8T6;MPU6050;USB转TTL 硬件实物图:
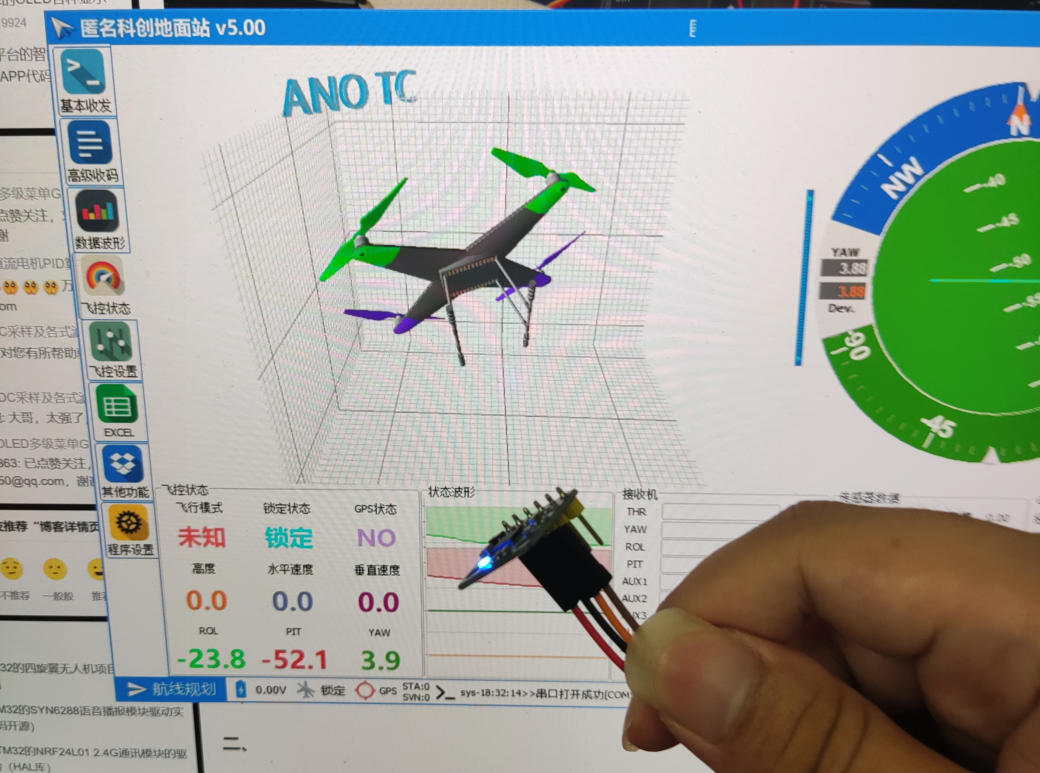
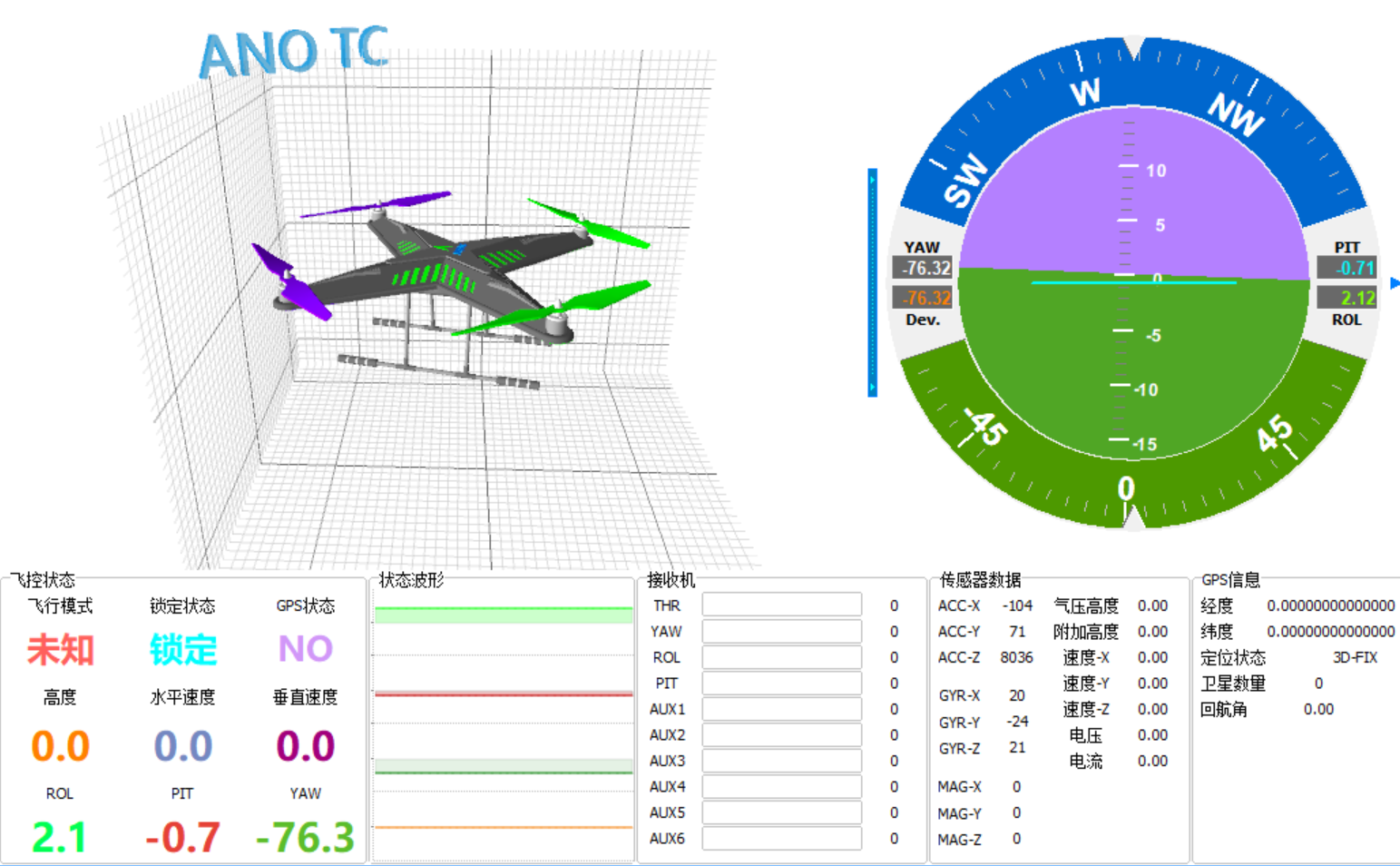
效果图:
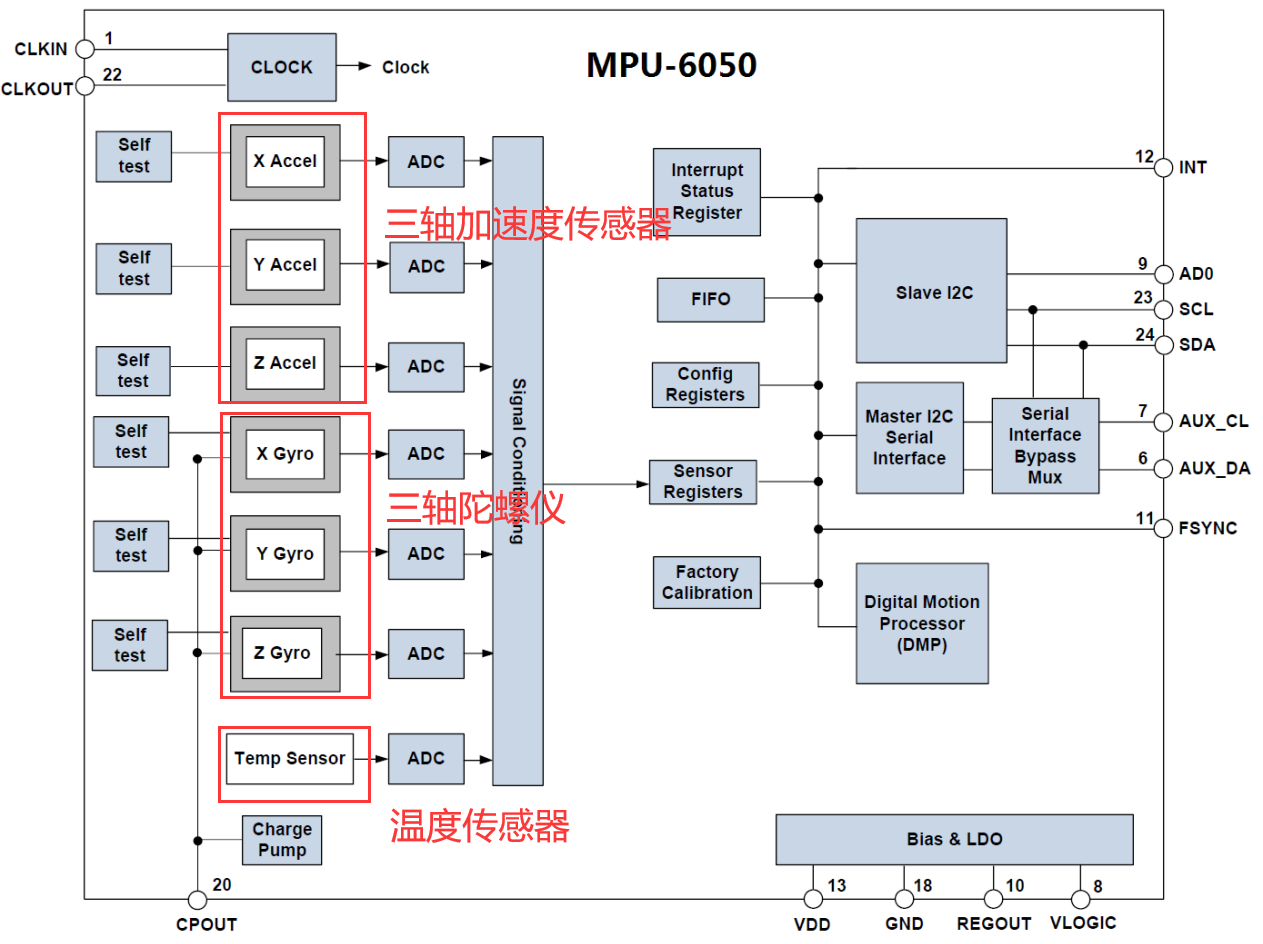
飞行器通常搭载一款姿态传感器(不管是六轴还是九轴姿态传感器),本项目中以最常见的 MPU6050 为例。MPU6050 传感器其实并不能直接输出我们飞行器飞行过程中的欧拉角(Euler-angles),通过读取它的传感器我们可以得到:3轴角速度+3轴角加速度。得到的角速度和角加速度信息我们是无法直接使用的,这个时候我们可以选择使用 DMP 去解算此时飞行器的欧拉角(Euler-angles)情况。当然,作者在项目中并没有使用 DMP 去解算飞行器的欧拉角(Euler-angles),而是使用了四元数解算的方法!
DMP(Digital Motion Processor)是一种数字运动处理器,它可以从MPU6050等传感器中读取数据,并进行解算以获取姿态信息。下面是DMP解算MPU6050的优缺点: 优点: DMP使用简单,可以直接套用官方库进行开发,无需自己编写解算算法。DMP不会占用太多的资源,因为它只需要读取传感器数据并进行简单的解算。DMP的输出数据经过处理,可以直接用于姿态控制等应用,无需再进行复杂的计算。缺点: DMP的输出数据精度可能不够高,特别是在高精度传感场景下。DMP的输出数据不稳定,可能会受到噪声等因素的影响。DMP无法测量偏航角,只能获取滚动角和俯仰角的信息。 1.2 四元数姿态解算本小节将以下方思维导图进行分析讲解:
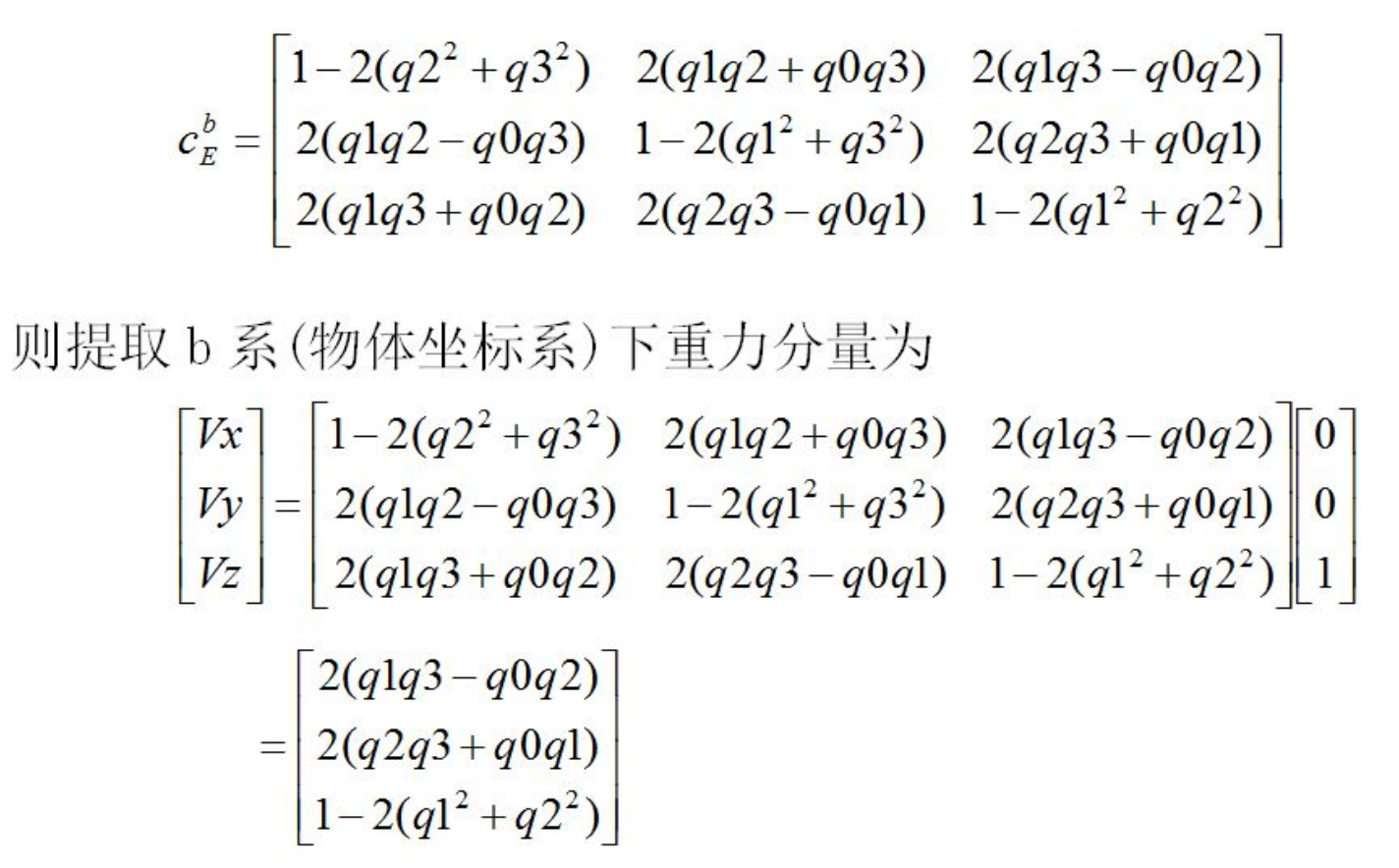
初次接触的读者朋友可能对四元数较为陌生,这里作者建议大家直接去阅读秦永元的《惯性导航》,里面有非常好的讲解,大家可以直接看绪论和第九章就可以。 《惯性导航》PDF地址:惯性导航(第三版) (sciencereading.cn) 下面我们根据思维导图用程序来一步一步实现如何求解欧拉角: 1、定义初始四元数的值为q0=1,q1=0,q2=0,q3=0。 2、读取加速度计值、角速度值,程序定义变量分别为ax、ay、az,gx、gy、gz,将陀螺仪值转为弧度,转换如下: gx = gx * 0.0174f; //1度=0.0174弧度 gy = gy * 0.0174f; gz = gz * 0.0174f;3、对加速度值进行归一化 //提取等效旋转矩阵中的重力分量 Gravity.x = 2*(NumQ.q1 * NumQ.q3 - NumQ.q0 * NumQ.q2); Gravity.y = 2*(NumQ.q0 * NumQ.q1 + NumQ.q2 * NumQ.q3); Gravity.z = 1-2*(NumQ.q1 * NumQ.q1 + NumQ.q2 * NumQ.q2); //加速度归一化 NormAcc = 1/sqrt(squa(MPU6050.accX)+ squa(MPU6050.accY) +squa(MPU6050.accZ)); //归一化计算 Acc.x = pMpu->accX * NormAcc; Acc.y = pMpu->accY * NormAcc; Acc.z = pMpu->accZ * NormAcc;4、提取姿态矩阵中的重力分量,我们已经得到数学计算公式为
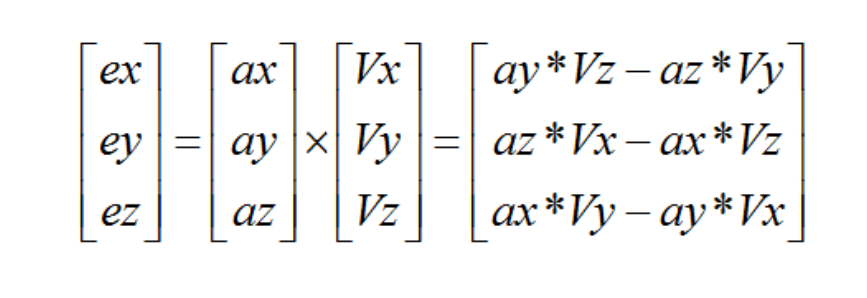
5、求姿态误差,对两向量进行叉乘(定义ex、ey、ez为三个轴误差元素),数学计算为:
6、互补滤波,将误差输入PID控制器后与陀螺仪测得的角速度相加,修正角速度值,程序实现如下(Kp为互补滤波系数这里取Kp=0.5,实际值根据需要进行调整):
7、解四元数微分方程,其数学计算如下(初始值q0 = 1,q1 = 0,q2 = 0,q3 = 0,
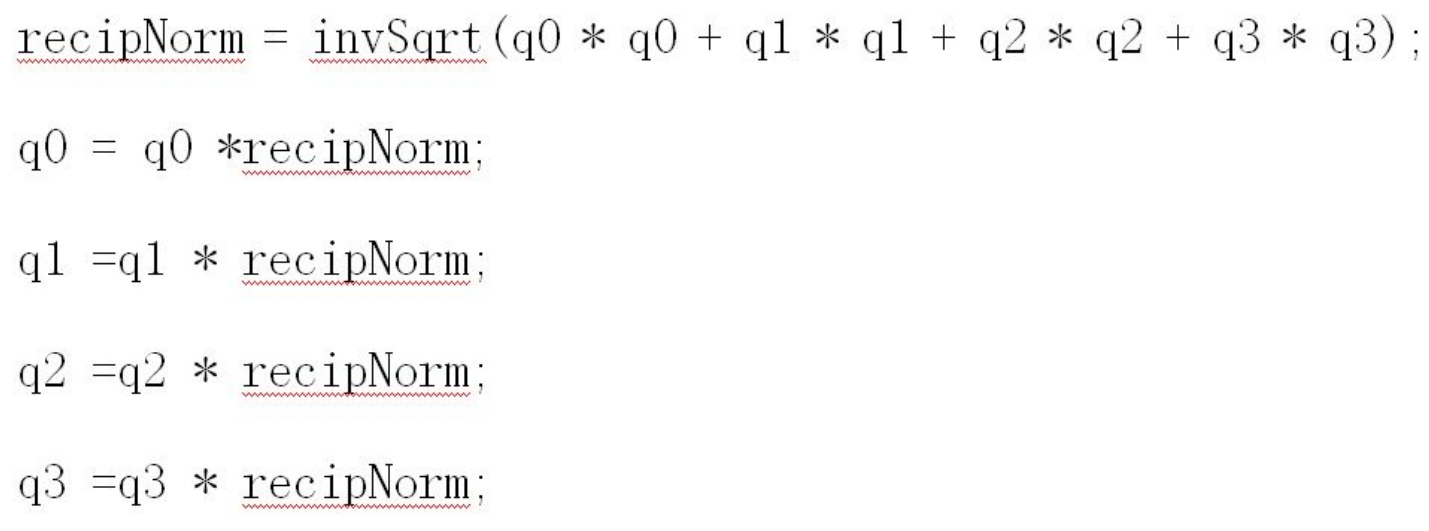
8、四元数归一化,归一化方法与加速度归一化方法一样;
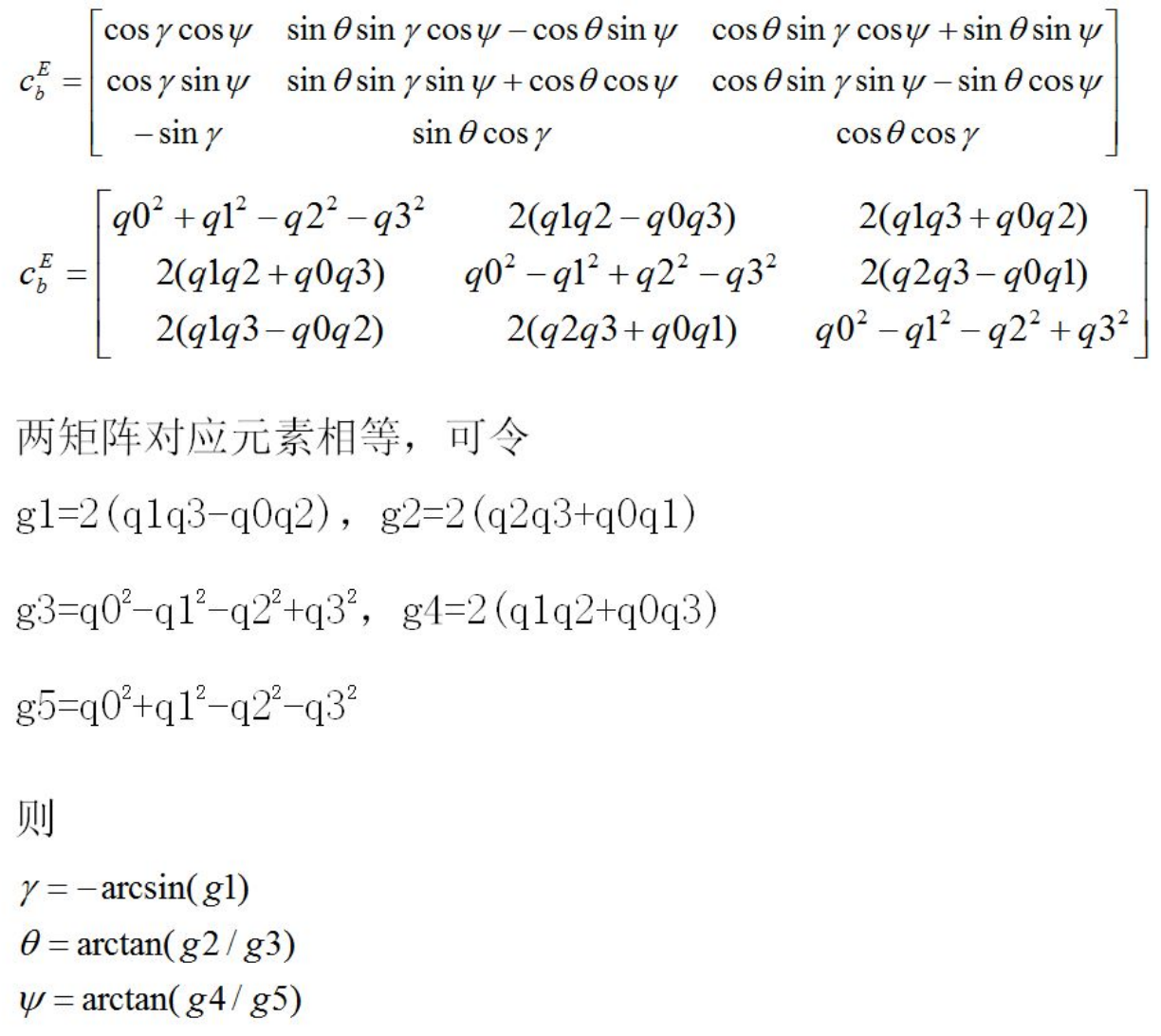
9、计算姿态角,数学公式为:
在飞行器中卡尔曼滤波的高效率性是十分优秀的,但是卡尔曼不能抵抗突变干扰,这点在飞行器中一般不会出现数据突变跳变,所以卡尔曼很适合运用于四轴飞行器。 飞行器项目中卡尔曼滤波的目标对象是加速度,三轴加速度都是独立变量,可以分别独立用一维线性卡尔曼进行滤波。由于加速度容易受震动干扰,它就是一个很典型的高频高斯白噪声(噪声随机,对称,符合高斯分布的噪声),所以加速度用卡尔曼滤波。 角速度不容易受到干扰,就用简单的一阶低通互补滤波。 飞控中的滤波算法:角加速度(卡尔曼滤波);角速度(一阶互补滤波);
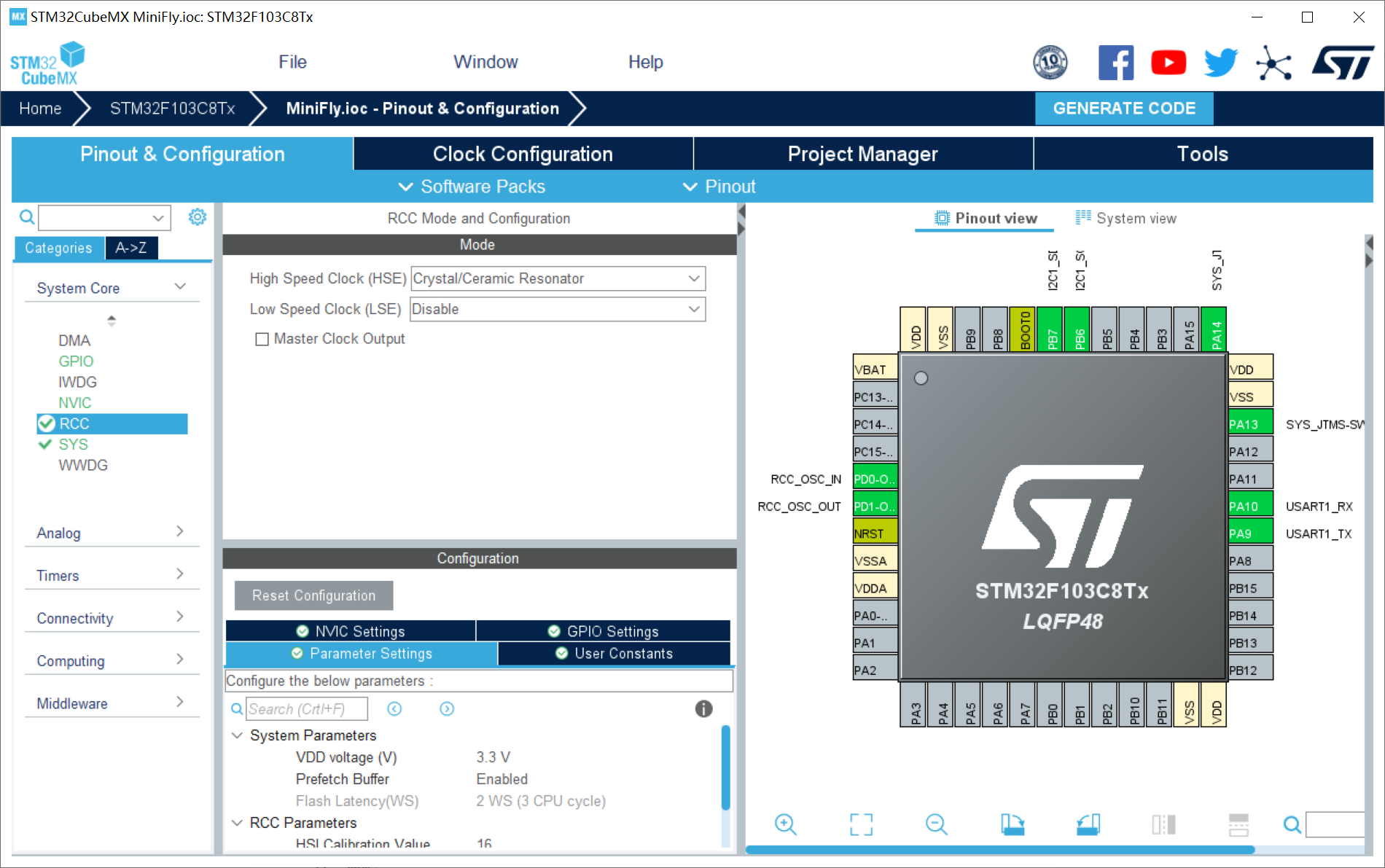
将上述数学公式代码化后可以得到卡尔曼滤波代码: #include "kalman.h" //一维卡尔曼滤波 void kalmanfiter(struct KalmanFilter *EKF,float input) { EKF->NewP = EKF->LastP + EKF->Q; EKF->Kg = EKF->NewP / (EKF->NewP + EKF->R); EKF->Out = EKF->Out + EKF->Kg * (input - EKF->Out); EKF->LastP = (1 - EKF->Kg) * EKF->NewP; } 三、CubeMX配置1、RCC配置外部高速晶振(精度更高)——HSE;
2、SYS配置:Debug设置成Serial Wire(否则可能导致芯片自锁);
3、TIM1配置:在TIM1的中断回调函数中发生MPU6050姿态解算与控制都是,中断周期:3ms;
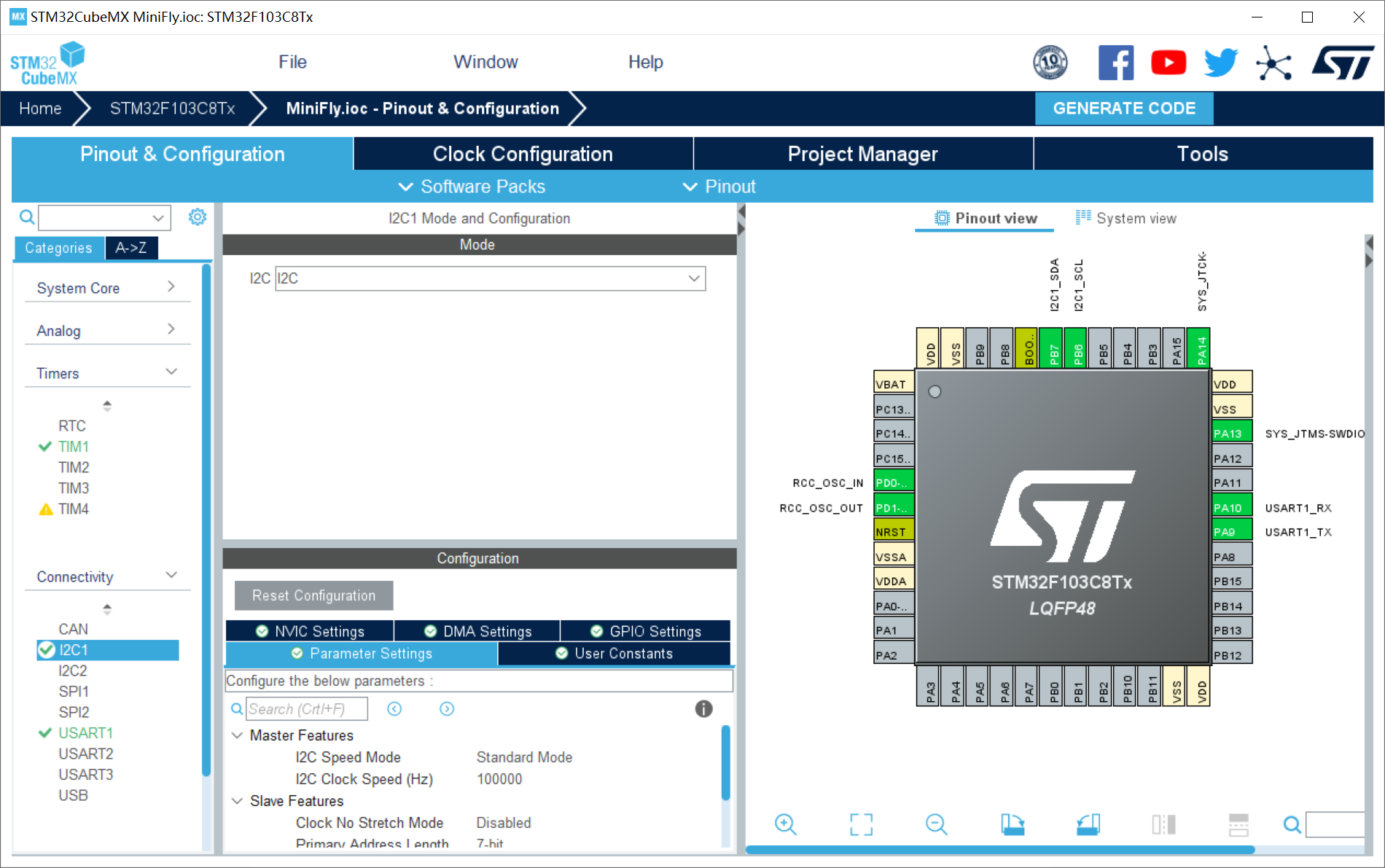
4、I2C1配置:配置MCU与MPU6050之间的通讯协议;
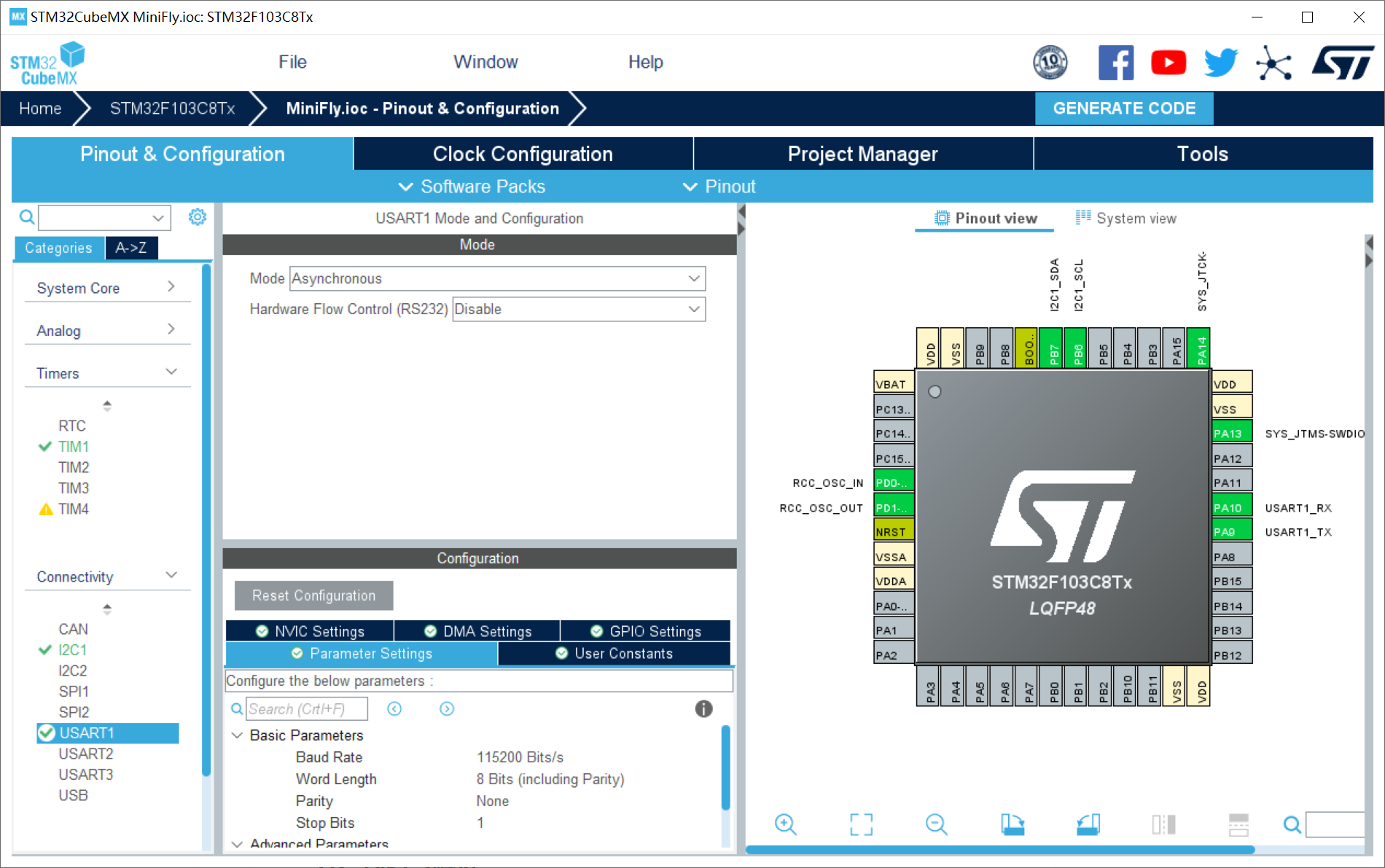
5、UART配置:通过UART1与匿名上位机进行通讯,显示飞行器3D姿态;
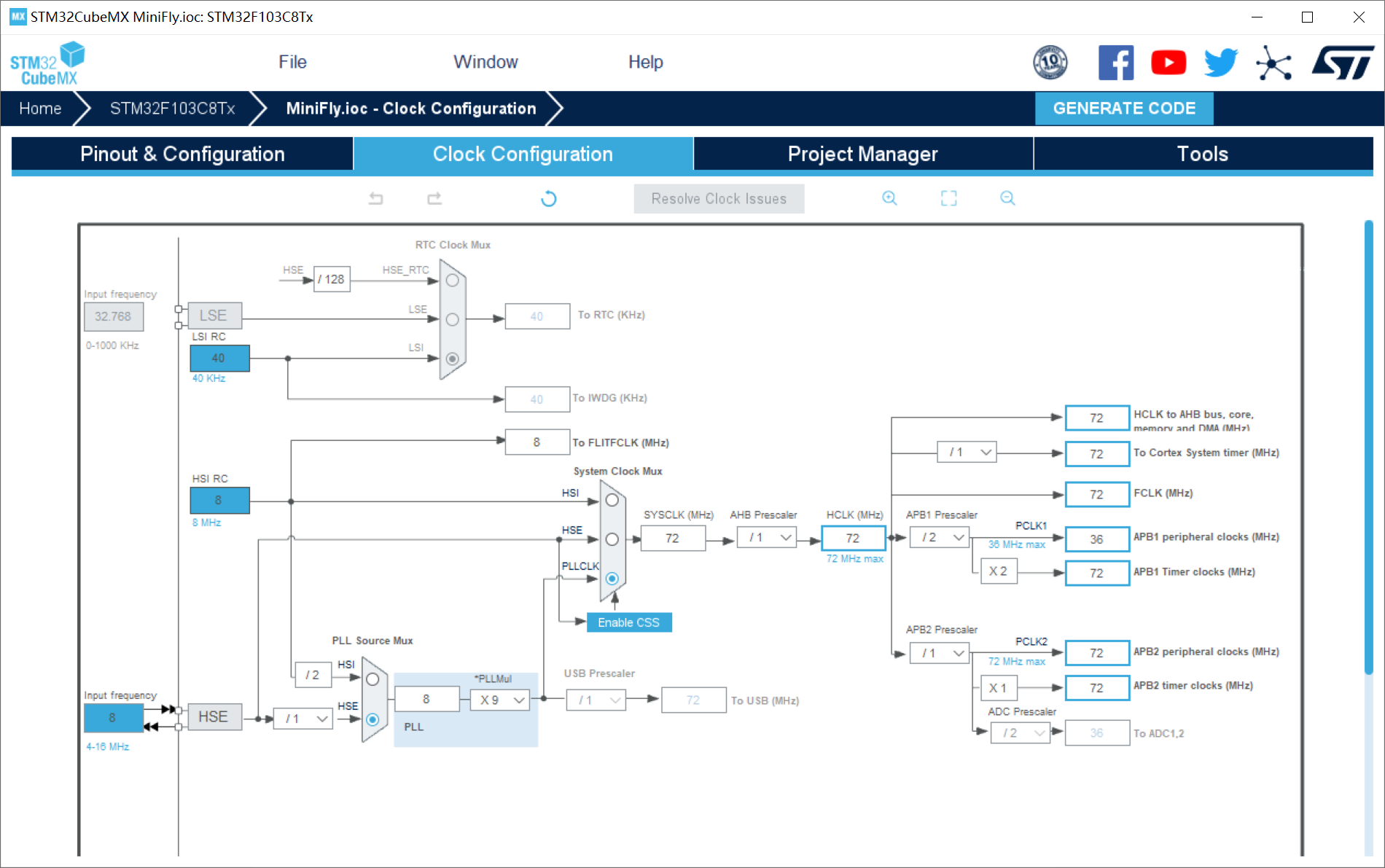
6、时钟树配置
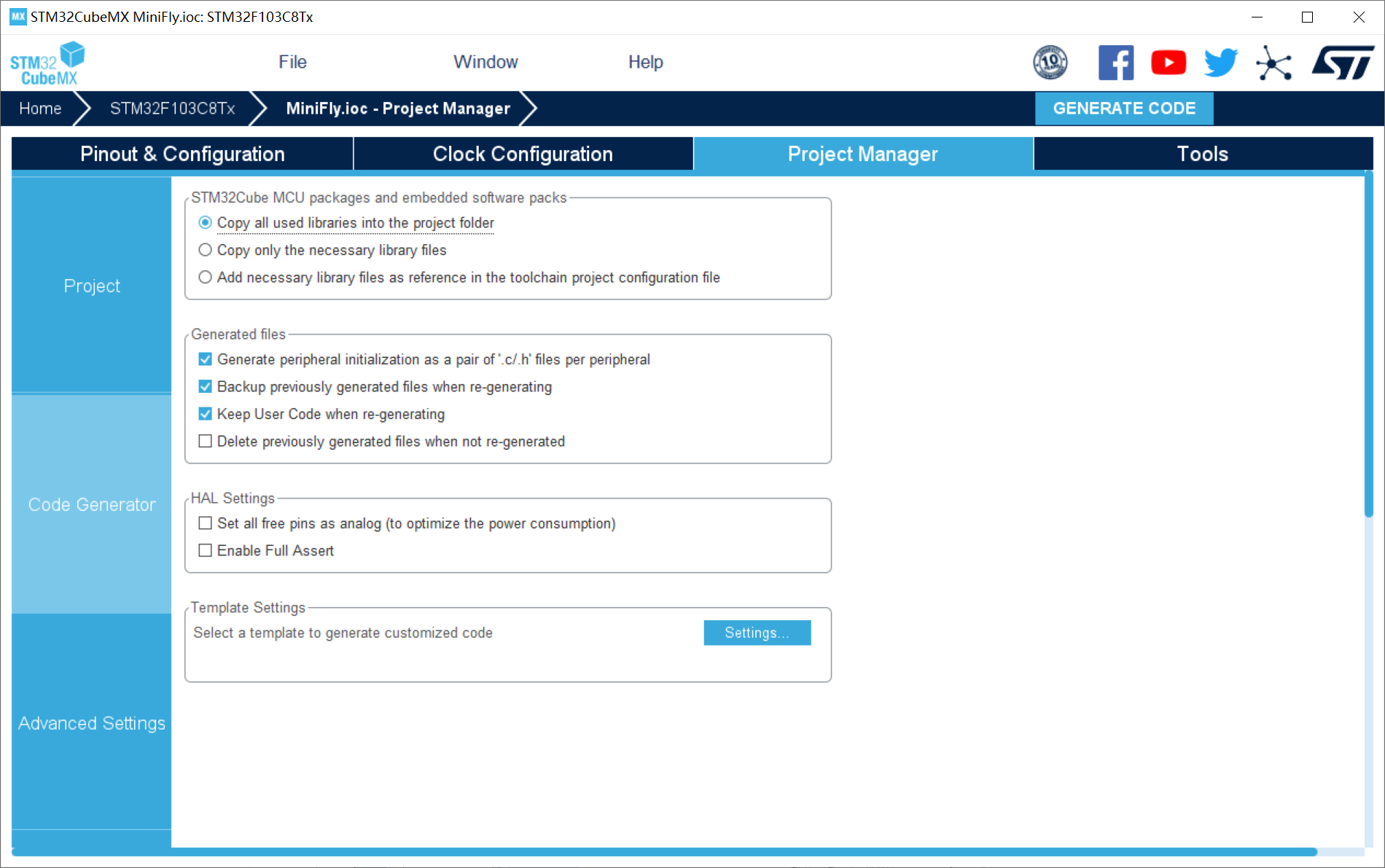
7、工程配置
mpu6050.h代码: mpu6050代码中核心是通过I2C通讯读取寄存器地址为:0X3B 和 0x43 的数值(分别为角加速度和角速度)。 #ifndef __MPU6050_H #define __MPU6050_H #include "stm32f1xx_hal.h"//用什么系列就是什么 //#define MPU_ACCEL_OFFS_REG 0X06 //accel_offs寄存器,可读取版本号,寄存器手册未提到 //#define MPU_PROD_ID_REG 0X0C //prod id寄存器,在寄存器手册未提到 #define MPU_SELF_TESTX_REG 0X0D //自检寄存器X #define MPU_SELF_TESTY_REG 0X0E //自检寄存器Y #define MPU_SELF_TESTZ_REG 0X0F //自检寄存器Z #define MPU_SELF_TESTA_REG 0X10 //自检寄存器A #define MPU_SAMPLE_RATE_REG 0X19 //采样频率分频器 #define MPU_CFG_REG 0X1A //配置寄存器 #define MPU_GYRO_CFG_REG 0X1B //陀螺仪配置寄存器 #define MPU_ACCEL_CFG_REG 0X1C //加速度计配置寄存器 #define MPU_MOTION_DET_REG 0X1F //运动检测阀值设置寄存器 #define MPU_FIFO_EN_REG 0X23 //FIFO使能寄存器 #define MPU_I2CMST_CTRL_REG 0X24 //IIC主机控制寄存器 #define MPU_I2CSLV0_ADDR_REG 0X25 //IIC从机0器件地址寄存器 #define MPU_I2CSLV0_REG 0X26 //IIC从机0数据地址寄存器 #define MPU_I2CSLV0_CTRL_REG 0X27 //IIC从机0控制寄存器 #define MPU_I2CSLV1_ADDR_REG 0X28 //IIC从机1器件地址寄存器 #define MPU_I2CSLV1_REG 0X29 //IIC从机1数据地址寄存器 #define MPU_I2CSLV1_CTRL_REG 0X2A //IIC从机1控制寄存器 #define MPU_I2CSLV2_ADDR_REG 0X2B //IIC从机2器件地址寄存器 #define MPU_I2CSLV2_REG 0X2C //IIC从机2数据地址寄存器 #define MPU_I2CSLV2_CTRL_REG 0X2D //IIC从机2控制寄存器 #define MPU_I2CSLV3_ADDR_REG 0X2E //IIC从机3器件地址寄存器 #define MPU_I2CSLV3_REG 0X2F //IIC从机3数据地址寄存器 #define MPU_I2CSLV3_CTRL_REG 0X30 //IIC从机3控制寄存器 #define MPU_I2CSLV4_ADDR_REG 0X31 //IIC从机4器件地址寄存器 #define MPU_I2CSLV4_REG 0X32 //IIC从机4数据地址寄存器 #define MPU_I2CSLV4_DO_REG 0X33 //IIC从机4写数据寄存器 #define MPU_I2CSLV4_CTRL_REG 0X34 //IIC从机4控制寄存器 #define MPU_I2CSLV4_DI_REG 0X35 //IIC从机4读数据寄存器 #define MPU_I2CMST_STA_REG 0X36 //IIC主机状态寄存器 #define MPU_INTBP_CFG_REG 0X37 //中断/旁路设置寄存器 #define MPU_INT_EN_REG 0X38 //中断使能寄存器 #define MPU_INT_STA_REG 0X3A //中断状态寄存器 #define MPU_ACCEL_XOUTH_REG 0X3B //加速度值,X轴高8位寄存器 #define MPU_ACCEL_XOUTL_REG 0X3C //加速度值,X轴低8位寄存器 #define MPU_ACCEL_YOUTH_REG 0X3D //加速度值,Y轴高8位寄存器 #define MPU_ACCEL_YOUTL_REG 0X3E //加速度值,Y轴低8位寄存器 #define MPU_ACCEL_ZOUTH_REG 0X3F //加速度值,Z轴高8位寄存器 #define MPU_ACCEL_ZOUTL_REG 0X40 //加速度值,Z轴低8位寄存器 #define MPU_TEMP_OUTH_REG 0X41 //温度值高八位寄存器 #define MPU_TEMP_OUTL_REG 0X42 //温度值低8位寄存器 #define MPU_GYRO_XOUTH_REG 0X43 //陀螺仪值,X轴高8位寄存器 #define MPU_GYRO_XOUTL_REG 0X44 //陀螺仪值,X轴低8位寄存器 #define MPU_GYRO_YOUTH_REG 0X45 //陀螺仪值,Y轴高8位寄存器 #define MPU_GYRO_YOUTL_REG 0X46 //陀螺仪值,Y轴低8位寄存器 #define MPU_GYRO_ZOUTH_REG 0X47 //陀螺仪值,Z轴高8位寄存器 #define MPU_GYRO_ZOUTL_REG 0X48 //陀螺仪值,Z轴低8位寄存器 #define MPU_I2CSLV0_DO_REG 0X63 //IIC从机0数据寄存器 #define MPU_I2CSLV1_DO_REG 0X64 //IIC从机1数据寄存器 #define MPU_I2CSLV2_DO_REG 0X65 //IIC从机2数据寄存器 #define MPU_I2CSLV3_DO_REG 0X66 //IIC从机3数据寄存器 #define MPU_I2CMST_DELAY_REG 0X67 //IIC主机延时管理寄存器 #define MPU_SIGPATH_RST_REG 0X68 //信号通道复位寄存器 #define MPU_MDETECT_CTRL_REG 0X69 //运动检测控制寄存器 #define MPU_USER_CTRL_REG 0X6A //用户控制寄存器 #define MPU_PWR_MGMT1_REG 0X6B //电源管理寄存器1 #define MPU_PWR_MGMT2_REG 0X6C //电源管理寄存器2 #define MPU_FIFO_CNTH_REG 0X72 //FIFO计数寄存器高八位 #define MPU_FIFO_CNTL_REG 0X73 //FIFO计数寄存器低八位 #define MPU_FIFO_RW_REG 0X74 //FIFO读写寄存器 #define MPU_DEVICE_ID_REG 0X75 //器件ID寄存器,who am i寄存器 //如果AD0脚(9脚)接地,IIC地址为0X68(不包含最低位). //如果接V3.3,则IIC地址为0X69(不包含最低位). #define MPU_ADDR 0X68 //因为MPU6050的AD0接GND,所以则读写地址分别为0XD1和0XD0 // (如果AD0接VCC,则读写地址分别为0XD3和0XD2) #define MPU_READ 0XD1 #define MPU_WRITE 0XD0 uint8_t MPU_Init(void); //初始化MPU6050 uint8_t MPU_Write_Len(uint8_t reg,uint8_t len,uint8_t *buf); //IIC连续写 uint8_t MPU_Read_Len(uint8_t reg,uint8_t len,uint8_t *buf); //IIC连续读 uint8_t MPU_Write_Byte(uint8_t reg,uint8_t data); //IIC写一个字节 uint8_t MPU_Read_Byte(uint8_t reg); //IIC读一个字节 uint8_t MPU_Set_Gyro_Fsr(uint8_t fsr); uint8_t MPU_Set_Accel_Fsr(uint8_t fsr); uint8_t MPU_Set_LPF(uint16_t lpf); uint8_t MPU_Set_Rate(uint16_t rate); uint8_t MPU_Set_Fifo(uint8_t sens); float MPU_Get_Temperature(void); uint8_t MPU_Get_Gyroscope(short *gx,short *gy,short *gz); uint8_t MPU_Get_Accelerometer(short *ax,short *ay,short *az); void MpuGetData(void); #endifmpu6050.c代码: #include "mpu6050.h" #include "alldata.h" #include "kalman.h" #include "stdio.h" #include "i2c.h" static volatile int16_t *pMpu = (int16_t *)&MPU6050; int16_t MpuOffset[6] = {0}; //MPU6050补偿数值 //初始化MPU6050 //返回值:0,成功 // 其他,错误代码 uint8_t MPU_Init(void) { uint8_t res; extern I2C_HandleTypeDef hi2c1; HAL_I2C_Init(&hi2c1); MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X80); //复位MPU6050 MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X00); //唤醒MPU6050 MPU_Set_Gyro_Fsr(3); //陀螺仪传感器,±2000dps MPU_Set_Accel_Fsr(0); //加速度传感器,±2g MPU_Set_Rate(50); //设置采样率50Hz MPU_Write_Byte(MPU_INT_EN_REG,0X00); //关闭所有中断 MPU_Write_Byte(MPU_USER_CTRL_REG,0X00); //I2C主模式关闭 MPU_Write_Byte(MPU_FIFO_EN_REG,0X00); //关闭FIFO MPU_Write_Byte(MPU_INTBP_CFG_REG,0X80); //INT引脚低电平有效 res=MPU_Read_Byte(MPU_DEVICE_ID_REG); printf("\r\nMPU6050:0x%2x\r\n",res); if(res==MPU_ADDR)//器件ID正确 { MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X01); //设置CLKSEL,PLL X轴为参考 MPU_Write_Byte(MPU_PWR_MGMT2_REG,0X00); //加速度与陀螺仪都工作 MPU_Set_Rate(50); //设置采样率为50Hz }else return 1; return 0; } //设置MPU6050陀螺仪传感器满量程范围 //fsr:0,±250dps;1,±500dps;2,±1000dps;3,±2000dps //返回值:0,设置成功 // 其他,设置失败 uint8_t MPU_Set_Gyro_Fsr(uint8_t fsr) { return MPU_Write_Byte(MPU_GYRO_CFG_REG,fsr=20)data=4; else if(lpf>=10)data=5; else data=6; return MPU_Write_Byte(MPU_CFG_REG,data);//设置数字低通滤波器 } //设置MPU6050的采样率(假定Fs=1KHz) //rate:4~1000(Hz) //返回值:0,设置成功 // 其他,设置失败 uint8_t MPU_Set_Rate(uint16_t rate) { uint8_t data; if(rate>1000)rate=1000; if(rate |






【本文地址】