三边测量法及卫星导航的融合(matlab代码) |
您所在的位置:网站首页 › 卫星导航定位算法与程序设计实验报告 › 三边测量法及卫星导航的融合(matlab代码) |
三边测量法及卫星导航的融合(matlab代码)
|
1.前言
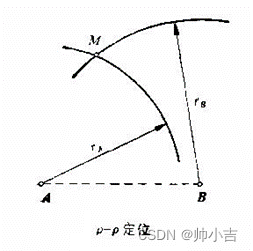
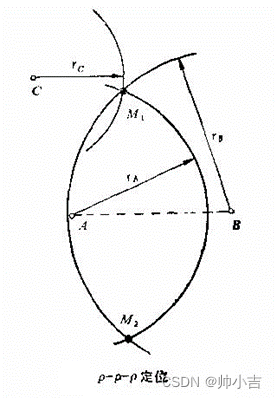
三边测量是一种常见的定位方法,通过测量三个参考点与待定位目标之间的距离或角度来确定目标的位置[1]。这种方法可用于无线电导航和WLAN定位等场景。无线电导航通过测量无线电信号的传播时间和强度来确定位置,而WLAN定位则利用无线局域网的信号强度和多个访问点之间的距离来实现定位。 然而,基于三边测量术的定位方法存在一些限制和问题[2]。首先,无线电导航受到信号衰减、多径效应和干扰等因素的影响,将导致测量误差。其次,WLAN定位依赖于无线局域网的覆盖范围和信号强度,若覆盖范围不足或信号受阻挡,定位精度会下降。此外,基于三边测量术的定位方法通常需要事先收集和构建位置数据库,增加了系统的开销和复杂性。 为了提高定位精度和可靠性,将三边测量术与卫星导航进行融合是一种可行的方法[4]。卫星导航系统如GPS可以提供全球范围的定位服务,并具有较高的精度。融合三边测量术和卫星导航需要解决信号融合、时钟同步、误差补偿等问题。通过合理的算法设计和系统优化,可以实现数据的一致性和准确性。此外,融合方法还需要考虑能耗管理和优化,以及实时性和延迟问题[6]。 总之,融合三边测量和卫星导航具有一定的可行性,可以提高定位的精度和可靠性。随着技术的进步和研究的深入,基于三边测量术和卫星导航融合的定位方法有望在各种应用场景中得到广泛应用[7][8]。 2.国内外研究现状 2.1 无线电导航定位技术 2.1.1 定位特点无线电导航的概念最早可以追溯到20世纪初。美国海军在1904年提出了使用无线电信号进行航行定位的想法,其中,基于三边测量术进行二维坐标的确定是当时的主要方法。随后,在第一次世界大战期间,无线电信号被用于导航、通信和侦察等军事应用。通过电磁波的发射、接收和处理,无线电导航设备能够测量出所在载体相对于导航台的方向、距离、距离差和速度等导航参量。 文献[1]提出了目前无线电导航定位方法:ρ-θ 定位,θ-θ定位,双曲线定位以及距离交会定位。前三种方法原理不涉及本文研究内容,在此不再赘述。第四种方法距离交会定位是指利用2个或3个测距台,进行ρ-ρ 或ρ-ρ-ρ 定位。如图1所示,2个(或3个)测距系统的圆形位置线相交,其交点位置即为目标所在位置。 图 1 距离交互定位示意图[1] 2.1.2 定位精度无线电导航系统的导航精度不仅与距离有关,而且与载体和导航台的相对几何位置有关,即相同距离上的用户定位精度可能存在较大差别,这是由其定位误差在空间的情况和走向决定的。所有的导航定位功能都是通过测量直接或间接实现的,由于各种噪声干扰和不可预见因素的存在,测量总会存在误差。在误差相对较小,影响因素较多的情况下,根据中心极限定理,假定这些误差都是零均值、平稳、遍历的随机过程。文献[2]中得出用户定位误差的三维概率密度函数为:
其中, 文献[5]指出,卫星导航代表了未来无线电导航的发展方向,克服了传统导航的缺陷和不足,使导航领域呈现出崭新的面貌,具有无比广阔和美好的发展前景。GPS和GLONASS系统能够在任何气候条件下,实时、便捷地提供连续的和高精度的位置、航向、速度、姿态和时间信息;卫星导航方式提供全球准确一致的导航信息,将提高世界陆海空运输的经济性与安全性,改变空中、海上和陆上交通管制与调度系统的体制,对全球经济发展和一体化进程做出贡献。 与此同时,无线电导航技术的应用正在迅速超越交通运输的范畴,渗透到国民经济和人民生活的各个方面,包括工业、农业、林业、渔业、公安、急救、邮电、电力传输、地质、石油开采、信息网络以及科学研究等等。无线电导航及其应用技术将发展成一个重要的高科技信息产业,在促进国民经济发展的同时,也在不断提高着人民的生活质量。 在军事应用方面,卫星导航、微波着陆、组合导航等除了广泛用于军民的航行引导外,还具有广泛的军事作战用途。而地形辅助导航系统、联合战术信息分发系统(JTIDS)及定位报告系统(PLRS)等在体制上与传统导航有较大差距,它们一般不为航行提供服务,主要作为军事战场应用,提供了战场所需要的高精度定位、抗干扰、抗毁灭、反利用、反欺骗等性能,形成了新一代的导航混合体,成为发展现代高科技军事的关键环节,并发挥出越来越大的作用。 2.2 WLAN定位技术 2.2.1 定位原理WLAN定位是一种利用WLAN信号进行定位的技术。它通过分析信号的强度、到达时间和其他特征,以确定设备的位置。文献[3]指出,基于RSSI(Received Signal Strength Indiation)技术是WLAN网络室内无线定位的主要研究方法。基于RSSI技术的室内定位技术又可以分为基于距离的方法和非距离计算方法。基于距离的无线定位方法中,三边定位方法和三角定位方法应用最为普遍,非距离计算方法则一般采用指纹匹配法。因三角定位法与指纹匹配法不涉及本文研究内容,在此不过多介绍。其中三边定位法示意图如下所示。
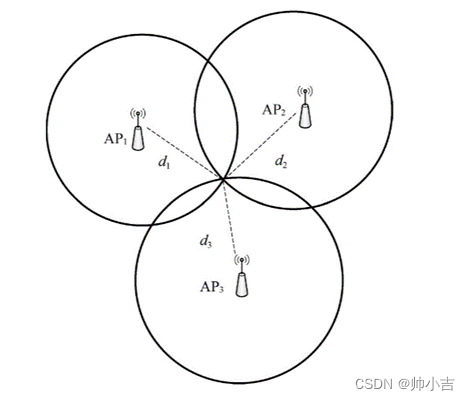
图 2 三边定位法示意图[4] 2.2.2 定位精度如图2所示,已知待定位终端距离信号源APi,i=1,2,3 ,的距离分别是di,i=1,2,3 ,根据几何原理,待定位终端一定位于分别以AP所在位置为圆心,对应距离为半径的3个圆的交点上。设终端的坐标为(x,y) ,3个AP的标为xi,yi,i=1,2,3 ,则根据相关关系可以求出终端坐标(x,y) :
对于WLAN定位技术的精度,常用均方误差(MSE)和均方根误差(RMSE)评价定位误差的离散程度:
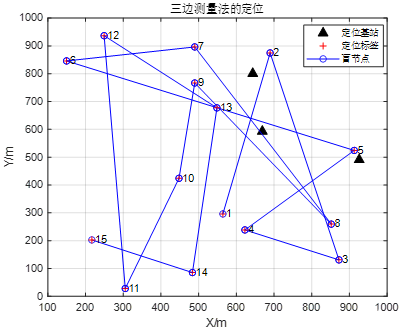
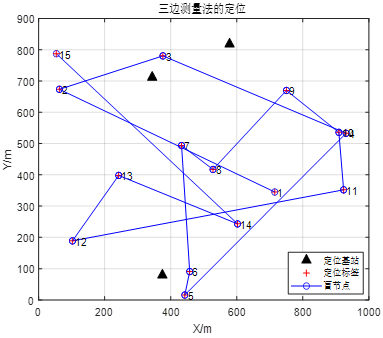
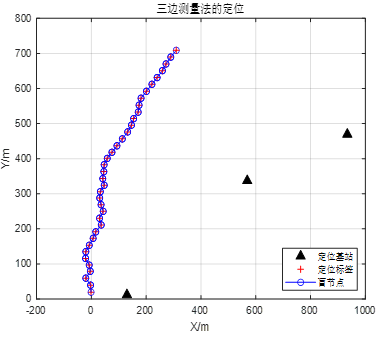
式中:(x,y) 代表移动手持终端的实际位置, 由于WLAN定位技术在室内环境下具有较好的精度和覆盖范围,而卫星导航定位技术在室外环境下具有较高的精度和定位覆盖范围。因此WLAN定位技术和卫星导航定位技术具有互补性优势,将两者融合可以弥补室内和室外环境的差异,提供更全面和准确的定位服务。 卫星导航定位技术(如GPS)在室内环境下存在信号衰减、多径效应等问题,导致室内定位精度较低。而WLAN定位技术可以提供室内的精确位置信息。将两者融合,可以通过使用WLAN的室内定位信息来校正卫星导航定位的误差,从而提高整体定位精度[8]。 3.未来研究方向针对上述问题以及应急救援、个人应用以及其他政府与行业应用对于室内位置服务需求的日益增加,目前融合导航定位技术的发展趋势主要体现在以下3个方向。 提高室内定位精度。由于室内环境复杂,存在着较为严重的反射、衍射和绕射等非视距(Non Light Of Sight, NLOS)传播多径等情况,人员的走动也会对电磁传播环境带来难以预计的变化。以上情况都对室内高精度定位带来了巨大的挑战,是当前待研究解决的技术难题[10]。提高室内定位效率。为克服非视距等导致的误差,当前的室内定位系统多采用了网格定位技术,通过预存网格特征信息,进行特征匹配定位。如要利用该方法实现高精度定位,需要建立并存储大量的特征网格,并增加节点的布设密度。如何进一步提高室内定位效率,以较小的特征信息实现精确的室内定位正成为当前室内定位技术中的研究热点。融合室外定位系统。位置服务正由室外服务向室内外一体化服务方向发展,融合室外定位系统,实现室内外无缝定位已成室内定位技术发展的必然趋势。在我国,随着我国自主研发的北斗系统的建设,融合室内定位系统与北斗系统正成为我国导航定位系统发展的重要方向[11]。 4. 仿真验证本节针对三遍测量术原理,开展部分matlab仿真实验,主要目的是验证三边测量术的准确性,实现三边测量术的部分功能,以增强对三边测量术的直观理解,下图展示了某点位的15个随机位置的定位情况 图3 三边测量术验证 从上图可以看出,对不同位置的节点,三边测量均可实现高精度定位,定位误差约10-6,但此时的假设是相对静止目标。为更进一步理解三边测量术原理,继续开展部分移动节点位置测量,当节点移动步长较短时,理论上三边测量术可准确描述出节点的移动轨迹,下图展示了一个较为复杂的移动轨迹定位图。 图4 三边测量术路径验证 从上图中可以看出,对于缓慢移动单位,三个基站进行三边测量可实现二维坐标的高精度定位,刻画较为准确的节点移动路径。然而,本次仿真实验没有考虑时延和多普勒的影响,在现实情况中,还需要考虑各种干扰对定位结果的影响,误差和偏差都将会增加。 5.代码实现 % ----------------采用三边定位法对未知节点定位------------------------------- %{ clc命令是用来清除命令窗口的内容。不管开启多少个应用程序,命令窗口只有一个, 所以clc无论是在脚本m文件或者函数m文件调用时,clc命令都会清除命令窗口的内容。 clear命令可以用来清除工作空间的内容。MATLAB有个基本的工作空间,用base标识, 此外,当打开一个函数m文件时,可能会产生很多工作空间。每一个函数对应一个工作空间。 %} clear; maxx = 800;%参考节点分布的最大横坐标 maxy = 800;%参考节点分布的最大纵坐标 %----------------------随机初始化三个已知的参考点[cx,cy]----------------- %{ rand()产生0和1之间均匀分布的随机数 rand(m)产生一个m*m的矩阵,当然矩阵的值是0和1之间均匀分布的随机数 rand(m,n)或者rand([m,n])产生一个m*n的矩阵 randn()产生均值为0, 方差为1的正态分布的随机数。用法和rand类似。 %} cx = maxx*rand(1,3); cy = maxy*rand(1,3); plot(cx,cy,'k^','MarkerSize',8);%参考节点图 % 给定出发点和终点 x0=0; yo=0; sx=500; sy=500; L_total=sqrt(sx^2+sy^2);%直线总距离 mx=0;%初始化节点位置 my=0; l=10;%设置步长 %% %--------随机初始化一个未知节点(mx,my)----------- for ii=1:30 %行走次数 lx=mx;%保存上一次坐标 ly=my; L_now=sqrt((sx-lx)^2+(sy-ly)^2); while 1 mx = lx+20*cos(rand()); %下一次坐标 my = ly+20*sin(l*rand()+1); %前进距离 L_next=sqrt((mx-sx)^2+(my-sy)^2); if L_next1 x=[lx,mx]; y=[ly,my]; plot(x,y,'b-o','Linewidth', 0.7); end % text(mx+10,my,num2str(ii)) da = sqrt((mx-cx(1))^2+(my-cy(1))^2); db = sqrt((mx-cx(2))^2+(my-cy(2))^2); dc = sqrt((mx-cx(3))^2+(my-cy(3))^2); % 计算定位坐标 [locx,locy] = triposition(cx(1),cy(1),da,cx(2),cy(2),db,cx(3),cy(3),dc); plot(locx,locy,'r+', 'Linewidth', 1); legend('定位基站','定位标签','盲节点','Location','SouthEast'); title('三边测量法的定位'); xlabel('X/m') ylabel('Y/m') grid on derror = sqrt((locx-mx)^2 + (locy-my)^2); disp(derror); end 参考文献 黄智刚,主编;孙国良,冯文全,陈金平,郑玉簋编著. 无线电导航原理与系统[M]. 北京:北京航空航天大学出版社, 2007. 董梅,杨曾,张健,等.基于信号强度的无线局域网定位技术[J]. 计算机应用2004,24(12):49-52. 邓中亮,余彦培,徐连明等编著.室内外无线定位与导航[M]. 北京:北京邮电大学出版社,2013. PRATT T, BOSTIAN C. Satellite Communications[M].2nd ed. Beijing: Publishing House of Electronics Industry, 2003. 杨章林,基于RSSI的WLAN定位系统研究与实现[D].大连:大连理工大学 ,2009. 赵军,基于射频信号强度的零配置室内定位系统[D].杭州:浙江大学,2007. 范录宏,皮亦鸣,李晋著. 北斗卫星导航原理与系统[M]. 北京:电子工业出版社,2021. Dias, Ryan, Abdulhayan, Sayed, S. B., Vinay Kumar. Localized Positioning Systems using Trilateration Algorithm. [J]. Journal of Pharmaceutical Negative Results, 2022, vol.13: 508-516. Qinghua Luo, Kexin Yang, Xiaozhen Yan, Jianfeng Li, Chenxu Wang, Zhiquan Zhou. An Improved Trilateration Positioning Algorithm with Anchor Node Combination and K-Means Clustering[J]. Sensors (Basel, Switzerland),2022, vol. 22(16): 6085. Mahmoud F Mosleh, Mohammed J Zaiter, Ali H Hashim. Enhanced Distance Utilized ToA/RSS to Estimate Position using Trilateration in Outdoor[J]. IOP Conference Series: Materials Science and Engineering, 2021, vol. 1105: 012023. Irwan Hadi Saputra, Gede Putra Kusuma. Indoor Positioning System Using Combination of Trilateration and Fingerprinting Methods[J]. International Journal of Advanced Trends in Computer Science and Engineering,2020, vol.9(4): 6331-6339. |





【本文地址】
今日新闻 |
推荐新闻 |