卡尔曼(kalman)滤波器原理 |
您所在的位置:网站首页 › 卡尔曼低通滤波电路图解大全 › 卡尔曼(kalman)滤波器原理 |
卡尔曼(kalman)滤波器原理
|
引言:卡尔曼滤波器适用于线性高斯系统,若为非线性系统,可以使用扩展卡尔曼滤波器。
一、状态估算器
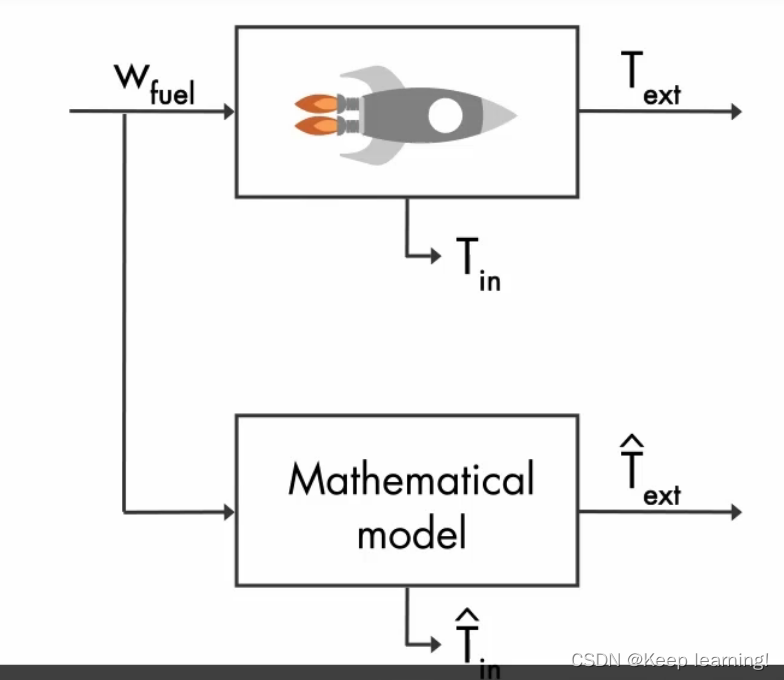
如下图,如果我们需要知道火箭发射时尾部内部的实际温度
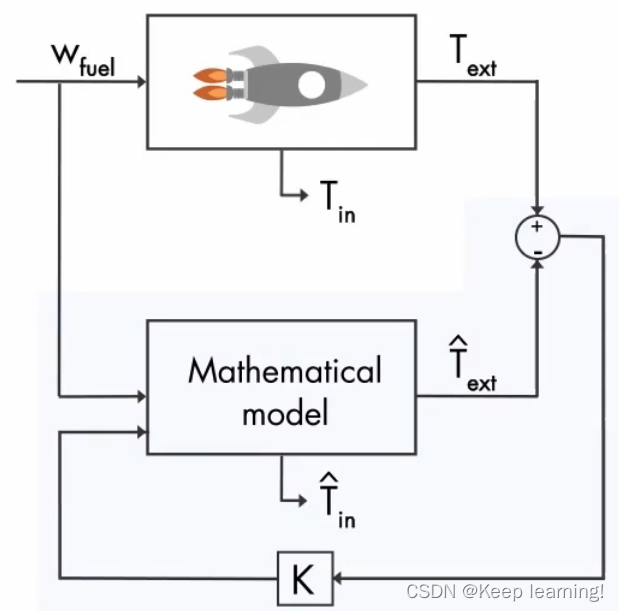
同时,我们也可以推导数学方程,利用输入燃料与外部温度的关系的数学表达式得到一个外部温度 如果有一个完美的系统,使测量值 我们的目标是使估计的外部温度与测量的外部温度温度吻合,如果这两者相等,那么估算的内部温度也能收敛到真实的内部温度,所以我们要做的是尽量减少估算和测量的外部温度之间的差异,如下图 我们需要使误差e变得尽可能小等于0, 使用一个控制器K来对估算数据进行调节(因为测量数据
里面阴影部分表示状态观测器,通过与控制器K形成闭环,不断调节输出值
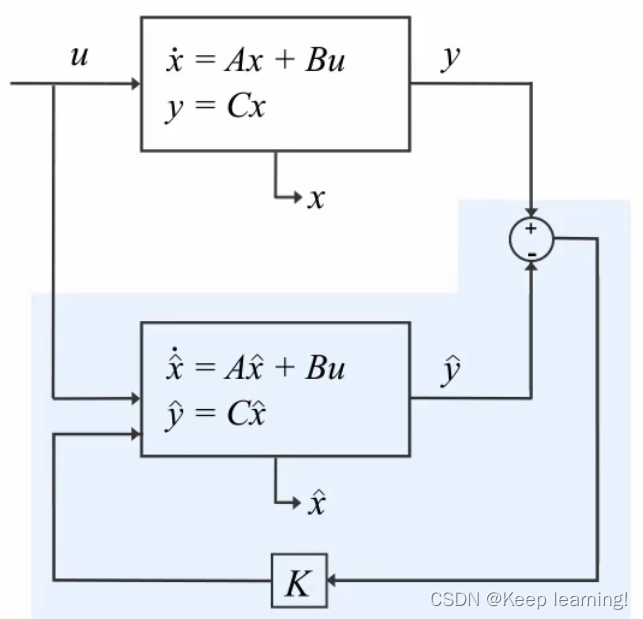
目标变为
上图中的
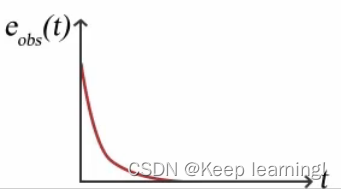
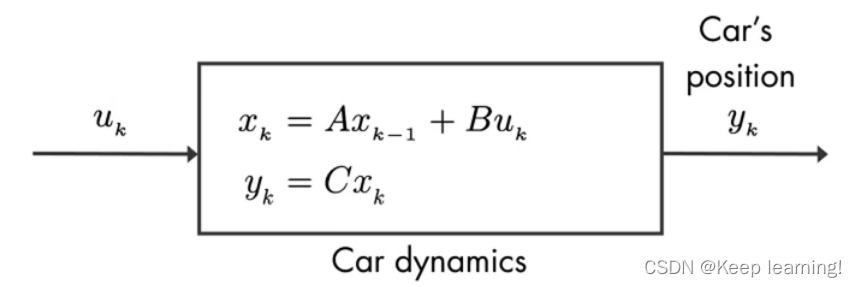
如果A-KC小于0,当t趋向于无穷时, 再举一个例子,当汽车行驶在公路上那个,我们需要知道汽车的位置,此时我们就可以用卡尔曼滤波器来进行估计。如下图,
其中, 与第一节中类似,我们可以通过一个数学模型来计算汽车的位置,那么我们可以得到下图,
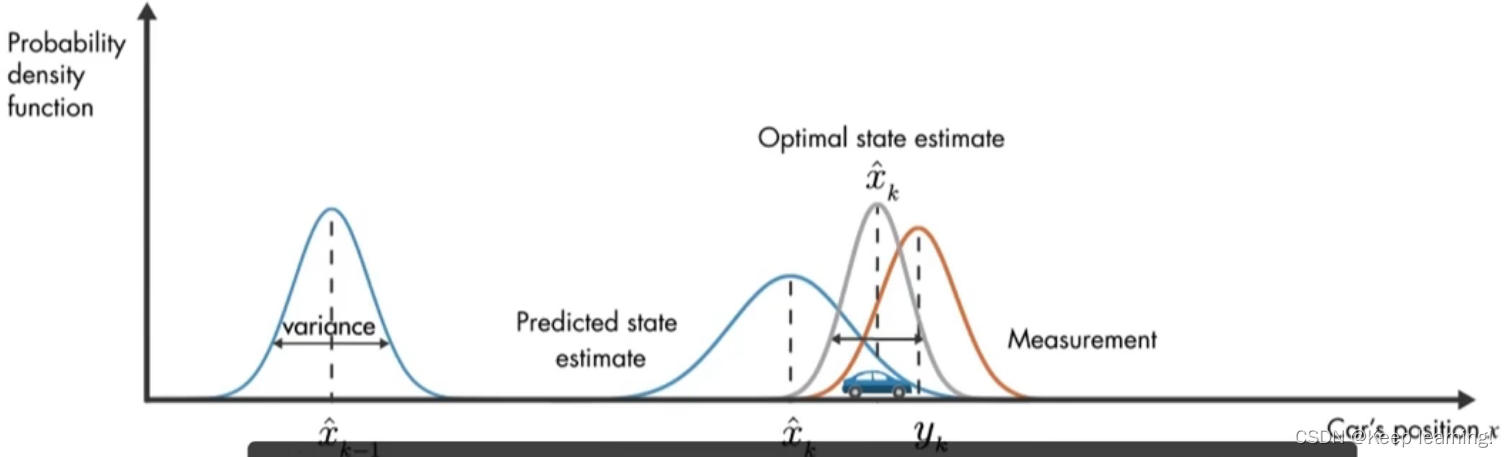
如图,卡尔曼滤波器就是根据观测值和估计值两个信息来确定汽车的最优位置。再解释一下,汽车从位置 估计值
在这里,直接引入卡尔曼滤波器方程
可以看到他与第一节中的状态观测器方程一样,实际上,卡尔曼滤波器就是一种状态观测器。其中大括号括起来的部分是预估值,即根据前面的值估计得到现在的估计值,重写如下
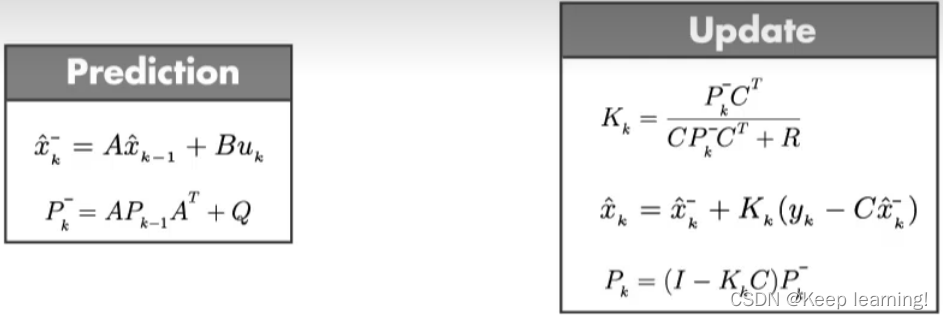
这就是卡尔曼滤波器的核心方程了。下面给出整个卡尔曼滤波器的方程组
在这里看以看出,卡尔曼滤波器分为两步,预测和更新。 预测部分包括状态预估值和误差协方差P,状态预估值根据k-1的最优状态和当前输入u组成,A是状态转移矩阵,B是输入的一个系数,P是状态预估值的方差,用来反映预估值的不确定性,这种不确定性来自过程噪声和k-1状态的不确定性。 更新部分使用预测部分得到的值,其中K为卡尔曼增益,调整卡尔曼增益,可以使更新后的状态值误差协方差最小。 循环上面的预测和更新部分,就是完整卡尔曼滤波器了。 注:本文参考b站MATLAB中国,链接http://【【官方中字】什么是卡尔曼滤波器 (Kalman Filters) ?(全7P) MATLAB&Simulink】https://www.bilibili.com/video/BV1V5411V72J?p=6&vd_source=a887b568bfe8c73e3ba0fa465faf2b6e 如有错误,欢迎批评指正! |


 是通过GPS得到的位置信息,他是已知的,但是他们都会存在噪声,他们都是随机的。见下图,系统模型变为
是通过GPS得到的位置信息,他是已知的,但是他们都会存在噪声,他们都是随机的。见下图,系统模型变为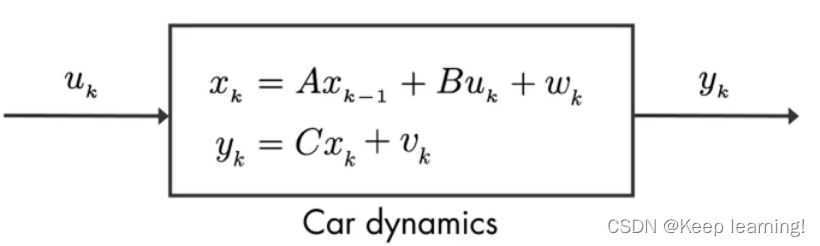



【本文地址】
今日新闻 |
推荐新闻 |