|
文章目录
一、PID控制原理二、PID控制指令1.PID_Compact2.PID_3Step3.PID_Temp4.指令块功能对比
三、PID控制示例1.调用并组态PID_Compact2.调用被控对象仿真块3.进行预调节4.进行精确调节
四、串级控制1.调用并组态PID_Temp2.调用被控对象仿真块3.进行从控制器预调节加热4.进行从控制器预调节加热/制冷5.进行从控制器预调节制冷6.进行从控制器精确调节加热7.进行从控制器精确调节制冷8.进行主控制器预调节加热9.进行主控制器精确调节加热
一、PID控制原理
基于反馈控制理论,在工程实际中,应用最为广泛的比例、积分、微分控制,简称PID控制。 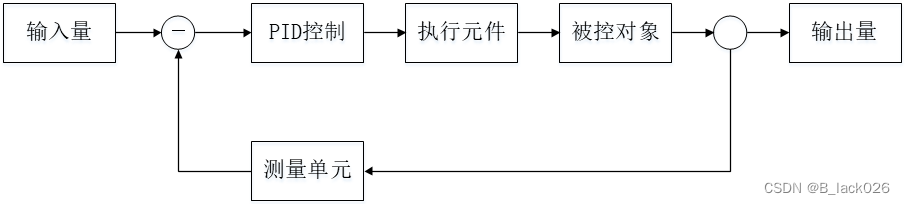 PID具有以下优点: 1.原理简单实用方便; 2.适用性强,可以广泛应用在化工,冶金等领域; 3.控制品质对其被控对象特性的变化不大敏感; 4.对模型依赖性少,按PID控制进行工作的自动控制调节器早已商品化。 S7-1200的PID功能: 1.提供3个PID指令:PID_Compact、PID_3Step、PID Temp; 2.PID的调节回路数仅受程序大小及执行时间影响,没有具体数量限制; 3.支持抗积分饱和功能; 4.支持不同错误的响应。 5.PID_3Step、PID_Temp支持死区; 6.PID_Temp支持控制带; 7.PID Temp支持串级控制。 PID具有以下优点: 1.原理简单实用方便; 2.适用性强,可以广泛应用在化工,冶金等领域; 3.控制品质对其被控对象特性的变化不大敏感; 4.对模型依赖性少,按PID控制进行工作的自动控制调节器早已商品化。 S7-1200的PID功能: 1.提供3个PID指令:PID_Compact、PID_3Step、PID Temp; 2.PID的调节回路数仅受程序大小及执行时间影响,没有具体数量限制; 3.支持抗积分饱和功能; 4.支持不同错误的响应。 5.PID_3Step、PID_Temp支持死区; 6.PID_Temp支持控制带; 7.PID Temp支持串级控制。
二、PID控制指令
1.PID_Compact
PID_Compact是连续的PID控制指令,支持模拟量或脉冲宽度调制(PWM)输出。  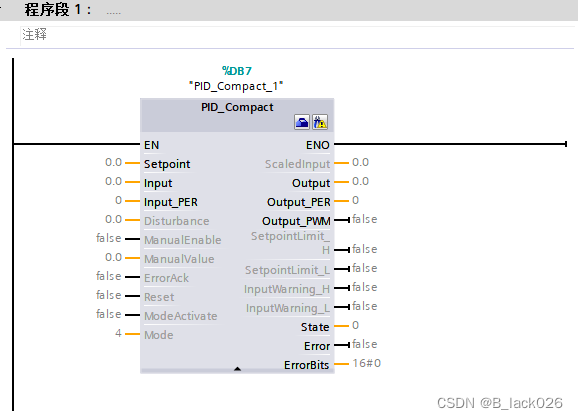
引脚注释Setpoint自动模式下的设定值Input工程量反馈值Input_PER模拟量反馈值(0~27648)Disturbance扰动变量或预控制值ManualEnable上升沿激活“手动”模式;下降沿激活由“Mode”指定的工作模式ManualValue该值在手动模式下使用,用作 PID 输出值ErrorAck确认错误Reset重启控制器ModeActivate上升沿激活由“Mode”指定的工作模式Mode通过“ModeActivate”的上升沿激活的模式;0:未激活;1:预调节;2:精确调节;3:自动模式;4:手动模式ScaledInput线性化输入Output工程量输出Output_PER模拟量输出(0~27648)Output_PWM脉宽调制输出SetpointLimit_H到达设定上限SetpointLimit_L到达设定下限InputWarning_H到达输入上限InputWarning_L到达输入下限State控制器当前操作模式Error错误报警ErrorBits报警信息
2.PID_3Step
PID_3Step是用于开关量信号控制的执行器;其输出用于模拟量和二进制阀门的控制;支持阀门的位置反馈和停止信号的检测;集成了电机转换时间的测量;支持死区控制。  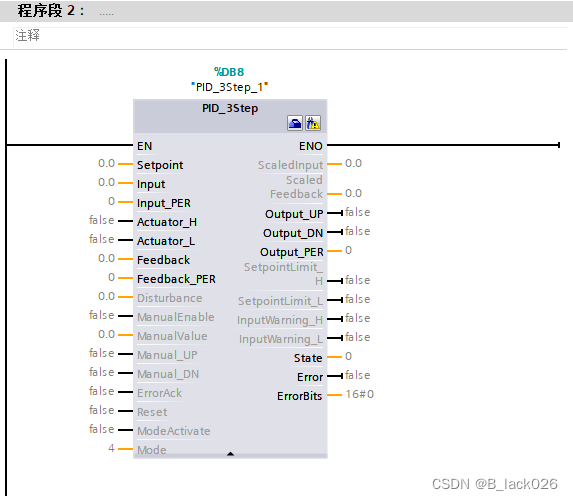
引脚注释Setpoint自动模式下的设定值Input工程量反馈值Input_PER模拟量反馈值(0~27648)Actuator_H阀门处于上端停止位时的数字位置反馈Actuator_L阀门处于下端停止位时的数字位置反馈Feedback阀门的位置反馈Feedback_PER阀门的模拟位置反馈Disturbance扰动变量或预控制值ManualEnable上升沿激活“手动”模式;下降沿激活由“Mode”指定的工作模式ManualValue在手动模式下指定阀门的绝对位置Manual_UP1:即使正在使用 Output_PER 或位置反馈,阀门也打开。如果已达到上端停止位,则阀门将不再移动;0:如果正在使用 Output_PER 或位置反馈,则阀门移至 ManualValue。否则阀门不再移动Manual_DN1:即使正在使用 Output_PER 或位置反馈,阀门也关闭。如果已达到下端停止位,则阀门将不再移动;0:如果正在使用 Output_PER 或位置反馈,则阀门移至 ManualValue。否则阀门不再移动ErrorAck确认错误Reset重新启动控制器ModeActivate上升沿激活由“Mode”指定的工作模式ScaledInput线性化输入ScaledFeedback线性化位置反馈Output_UP用于打开阀门的数字量输出值Output_DN用于关闭阀门的数字量输出值Output_PER模拟量输出值SetpointLimit_H到达设定上限SetpointLimit_L到达设定下限InputWarning_H到达输入上限InputWarning_L到达输入下限State控制器当前操作模式Error错误报警ErrorBits报警信息Mode通过“ModeActivate”的上升沿激活的模式;0:未激活;1:预调节;2:精确调节;3:自动模式;4:手动模式;6:转换时间测量;10:无停止位信号的手动模式
3.PID_Temp
PID_Temp转为温度控制而设计,支持加热和制冷控制;支持模拟量或脉冲宽度调制(PWM)输出;提供加热和制冷的自整定;带有抗积分饱和的级联控制功能;支持死区和控制带功能。 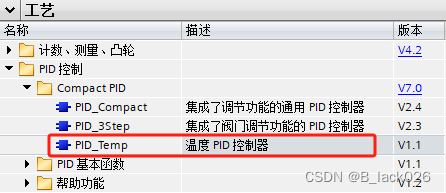 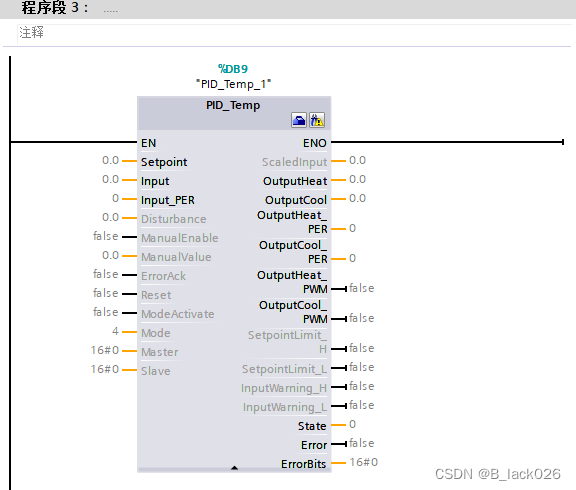
引脚注释Setpoint自动模式下的设定值Input工程量反馈值Input_PER模拟量反馈值(0~27648)Disturbance扰动变量或预控制值ManualEnable上升沿激活“手动”模式;下降沿激活由“Mode”指定的工作模式ManualValue该值在手动模式下使用,用作 PID 输出值ErrorAck确认错误Reset重启控制器ModeActivate上升沿激活由“Mode”指定的工作模式Mode通过“ModeActivate”的上升沿激活的模式;0:未激活;1:预调节;2:精确调节;3:自动模式;4:手动模式Master级联控制的接口,通过主控制器“PID_Temp_1”调用从控制器“PID_Temp_2”Slave级联控制的接口,需要将主站Slave接口变量,在从站Master接口处调用ScaledInput标定后的过程值OutputHeat工程量加热输出OutputCool工程量制冷输出OutputHeat_PER模拟量加热输出OutputCool_PER模拟量制冷输出OutputHeat_PWM脉宽调制加热输出OutputCool_PWM脉宽调制制冷输出SetpointLimit_H到达设定上限SetpointLimit_L到达设定下限InputWarning_H到达输入上限InputWarning_L到达输入下限State控制器当前操作模式Error错误报警ErrorBits报警信息
4.指令块功能对比
指令PID_CompactPID_3StepPID_Temp模拟量输出支持支持支持PWM支持支持支持加热/指令输出不支持不支持支持死区不支持支持支持控制带不支持不支持支持串级控制不支持不支持支持预调节支持支持支持精确调节支持支持支持抗积分饱和支持支持支持执行器阀位反馈不支持支持不支持
三、PID控制示例
1.调用并组态PID_Compact
PID指令块需要在循环中断组织块中调用;  在默认变量表中创建如下变量; 在默认变量表中创建如下变量;  将变量连接到PID_Compact指令块的对应引脚; 将变量连接到PID_Compact指令块的对应引脚; 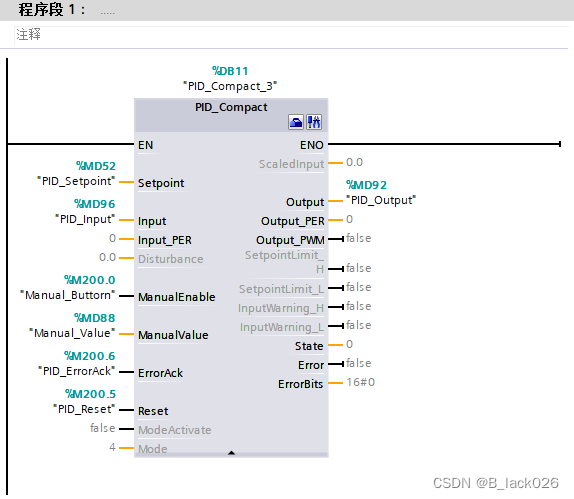 组态PID_Compact; 组态PID_Compact; 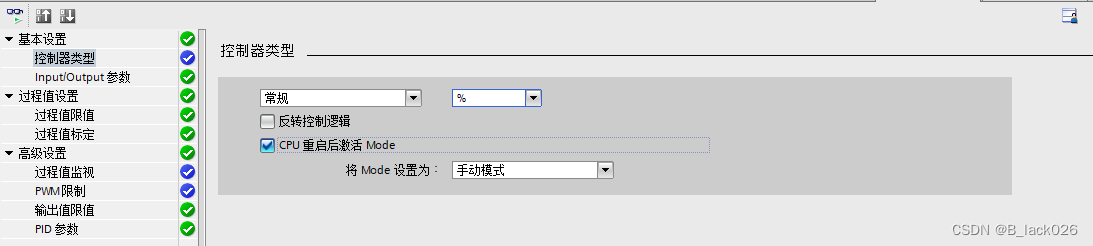 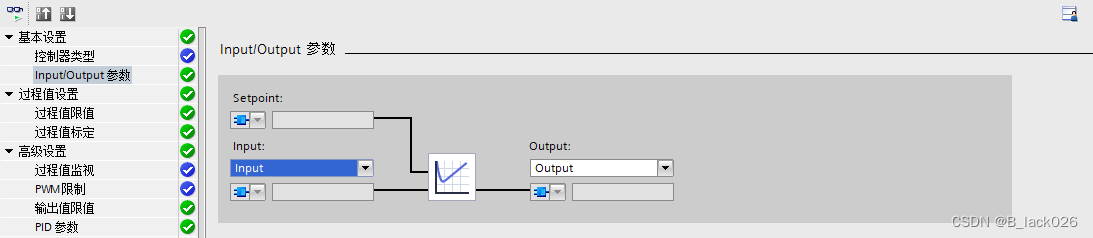 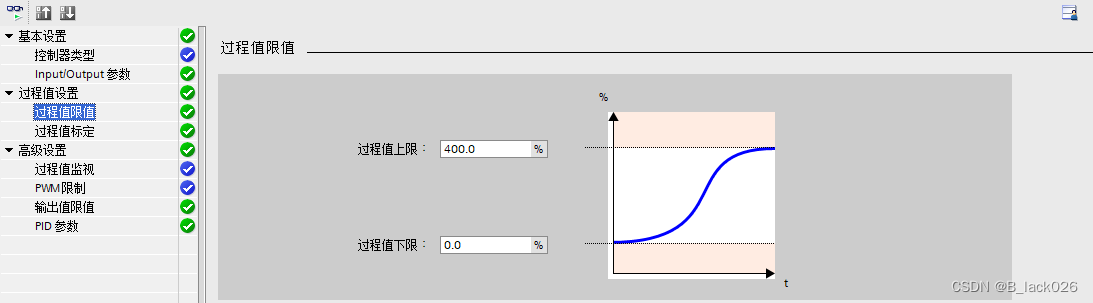 过程值标定功能只有在Input/Output参数选择Input_PER或Out_PER时,才会启用; 过程值标定功能只有在Input/Output参数选择Input_PER或Out_PER时,才会启用; 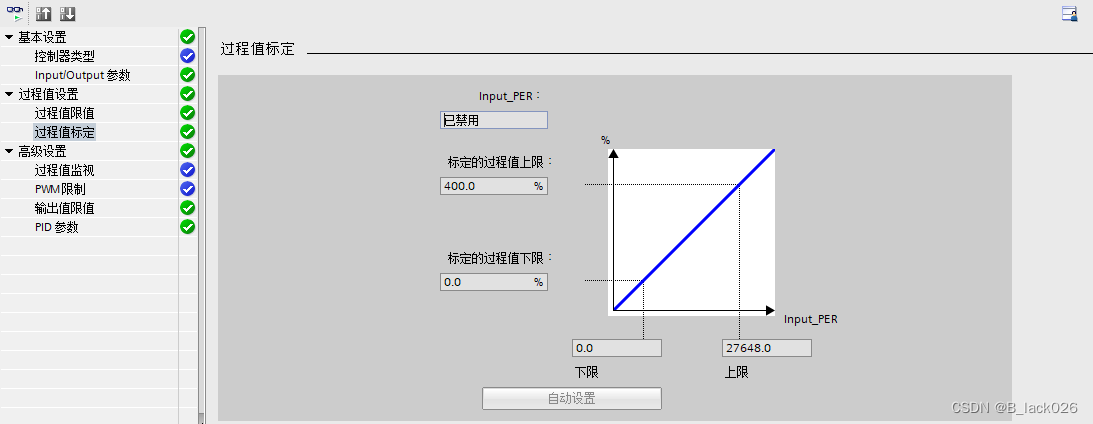 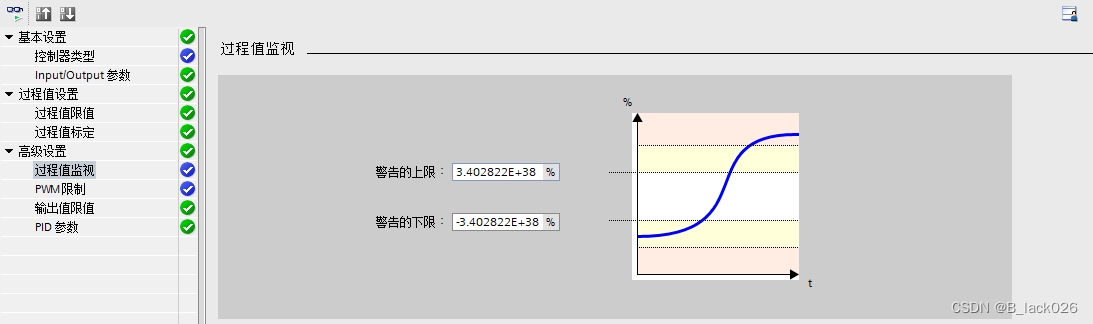  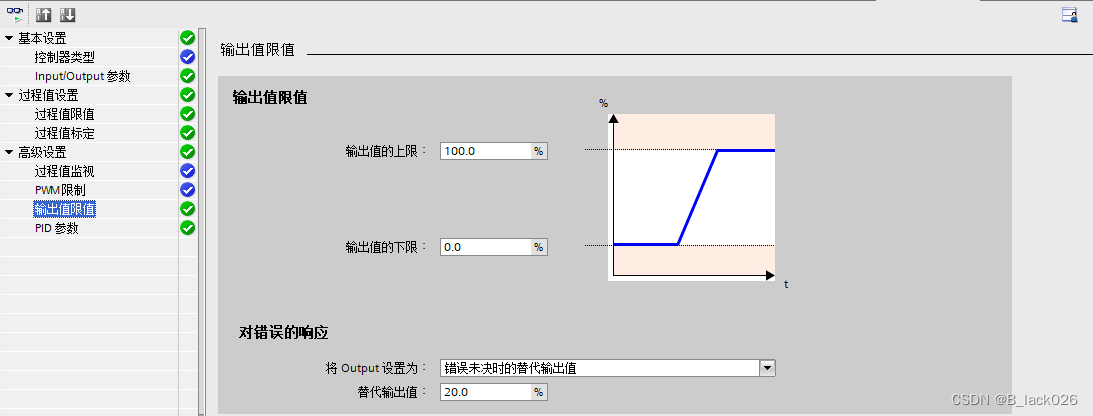 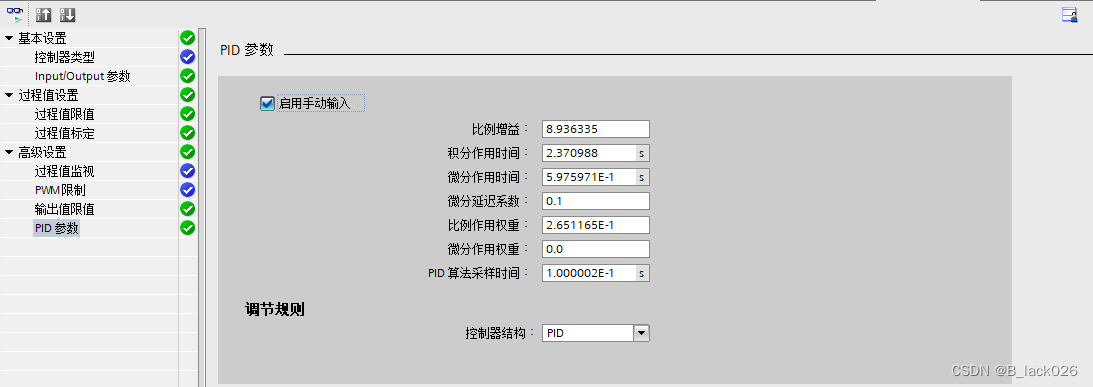
2.调用被控对象仿真块
PID仿真块的库文件“LSim”可在西门子工业在线支持官网下载; PID仿真块的库文件 关于添加全局库的方法,以及更多全局库文件的下载,见以下链接; 在 TIA Portal 中,如何打开、编辑和升级全局库 调用下载好的仿真块,并连接如下变量; 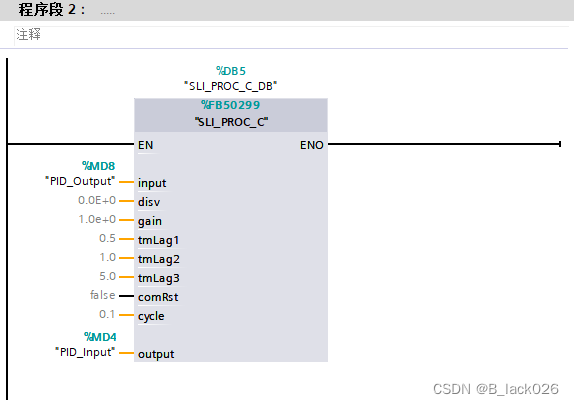
3.进行预调节
首先进行预调节,预调节用于确定对输出值跳变的过程响应,并搜索拐点。 要求: 1.设定值-过程值>(过程值上限值-过程值下限值)×30%; 2.设定值-过程值>设定值×50%; 3.PID控制器处于手动、未激活或者自动模式。 打开PLC仿真器,下载程序,双击打开调试界面;  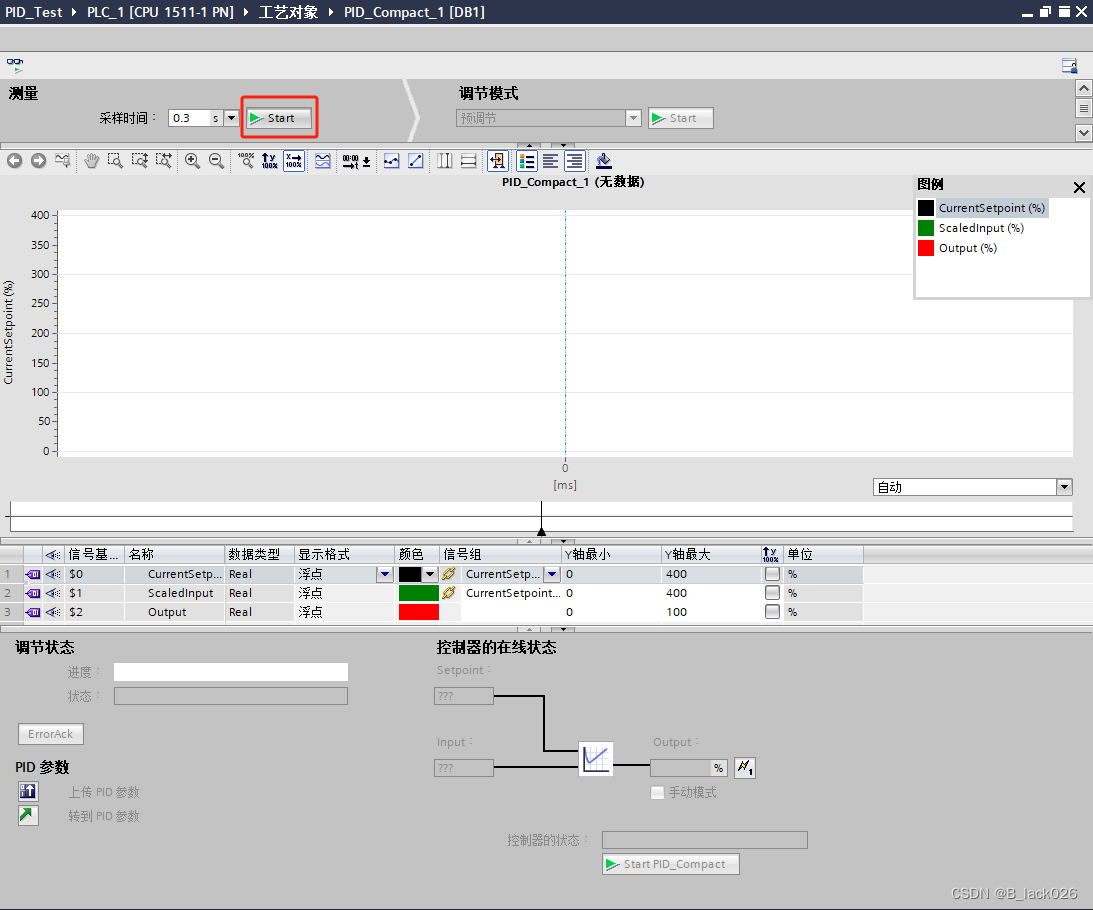 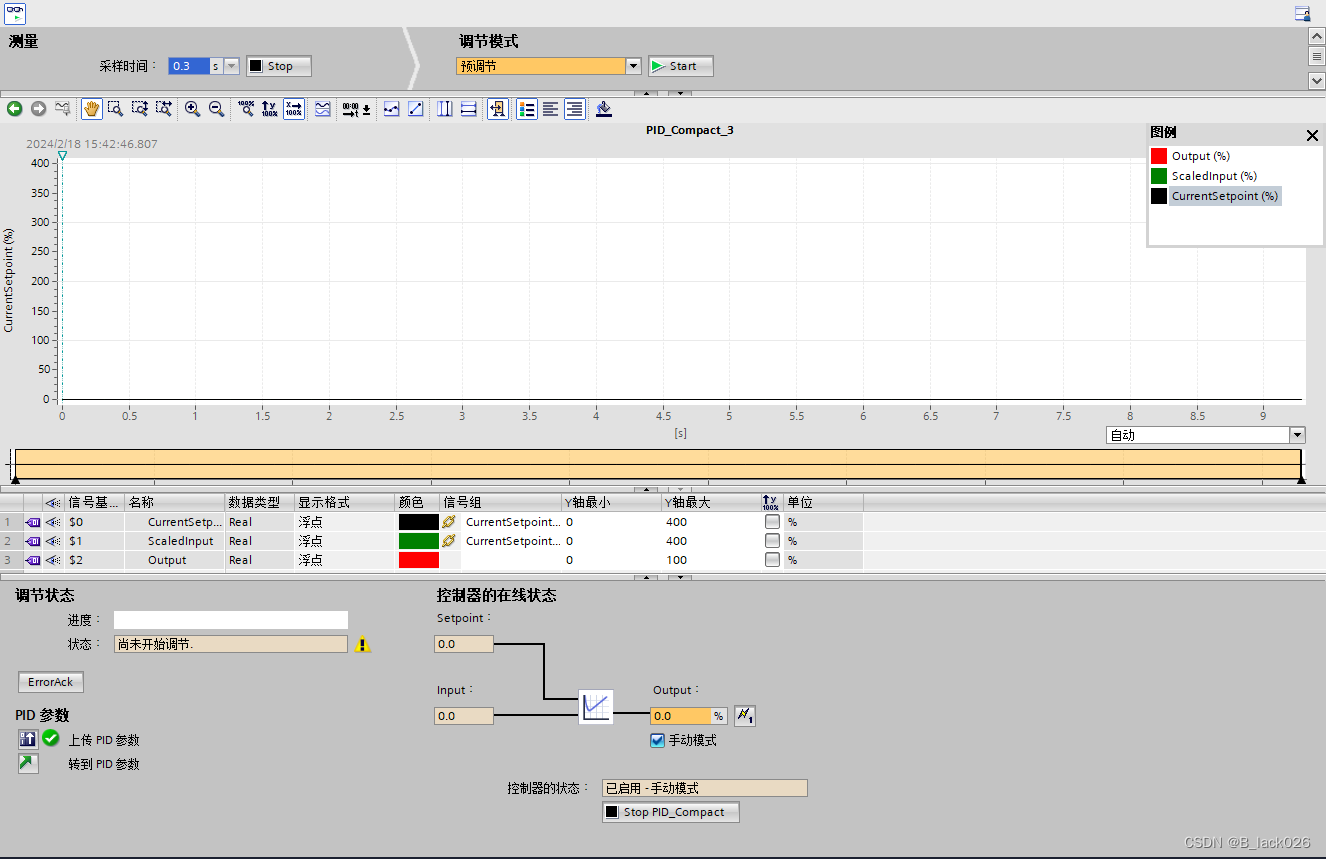 为满足预调节的要求,给定Setpoint一个设定值,在程序段中修改操作数,我们设置为90; 为满足预调节的要求,给定Setpoint一个设定值,在程序段中修改操作数,我们设置为90; 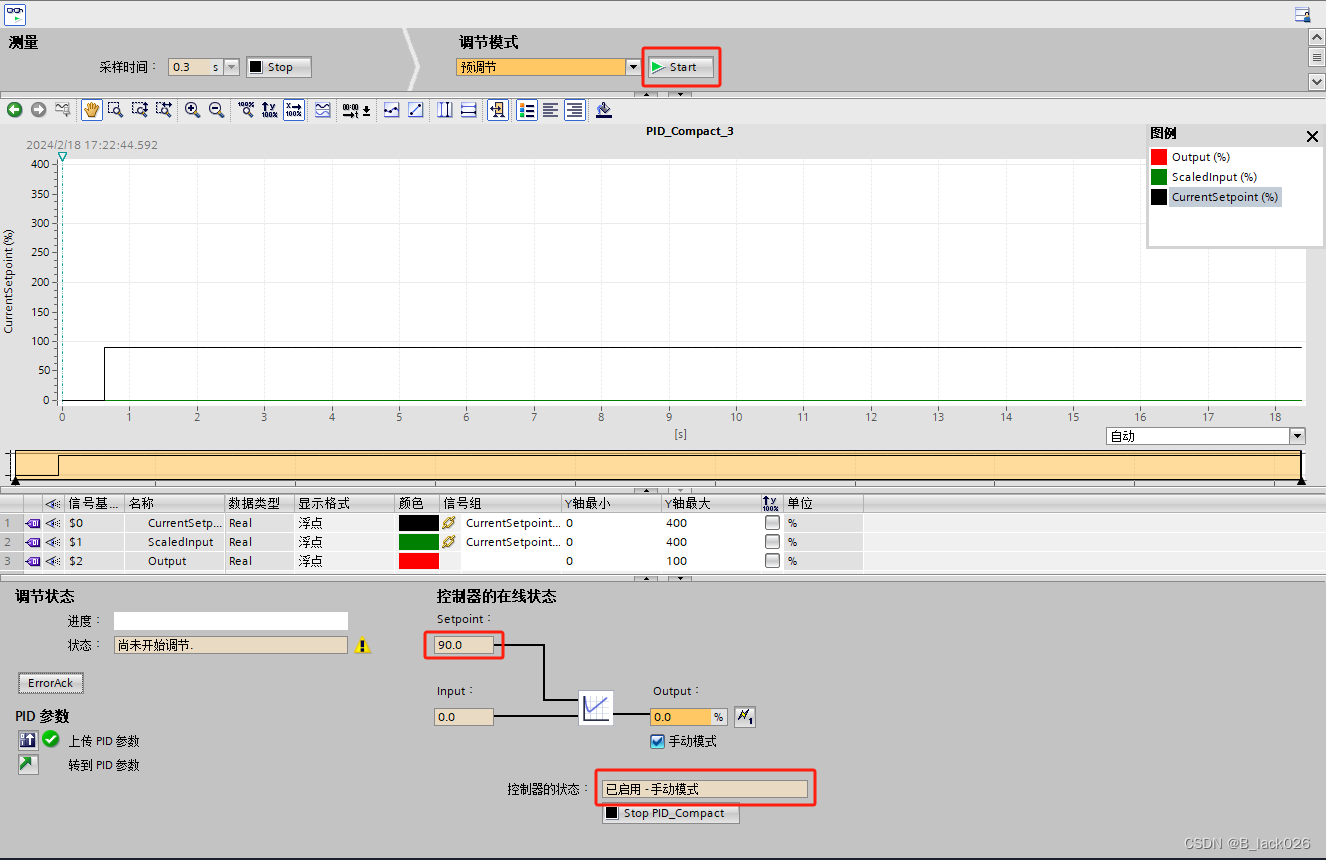 点击Start进行预调节。 点击Start进行预调节。
4.进行精确调节
预调节结束后,点击上传PID参数,将PID参数上传至CPU中,然后启动精确调节; 精确调节:使过程值出现恒定受限的振荡,并根据此振荡的幅度和频率为操作点调节PID参数; 要求: 1.控制器工作在操作点; 2.不希望有扰动。 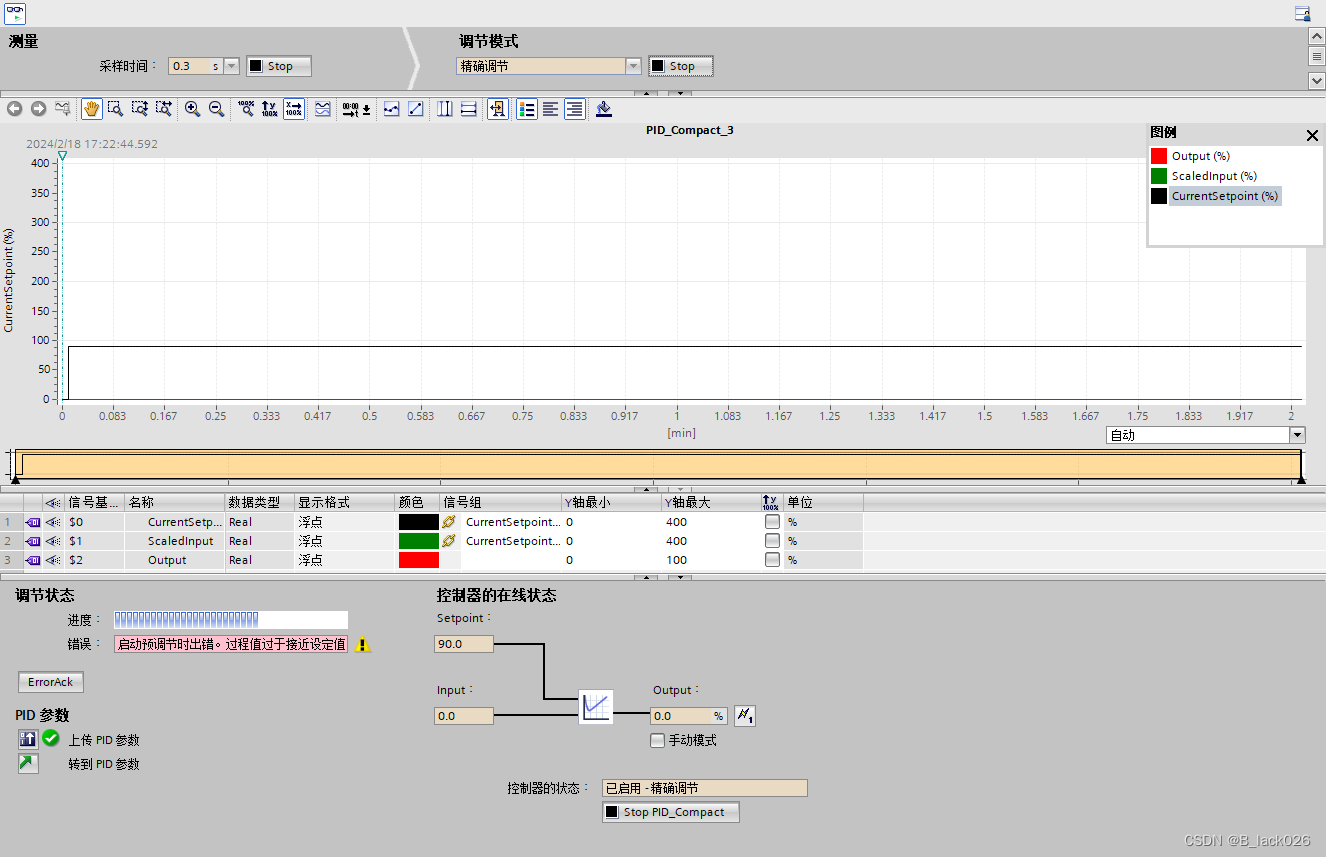 精确调节结束后,点击上传PID参数,将PID参数上传至CPU中。 精确调节结束后,点击上传PID参数,将PID参数上传至CPU中。 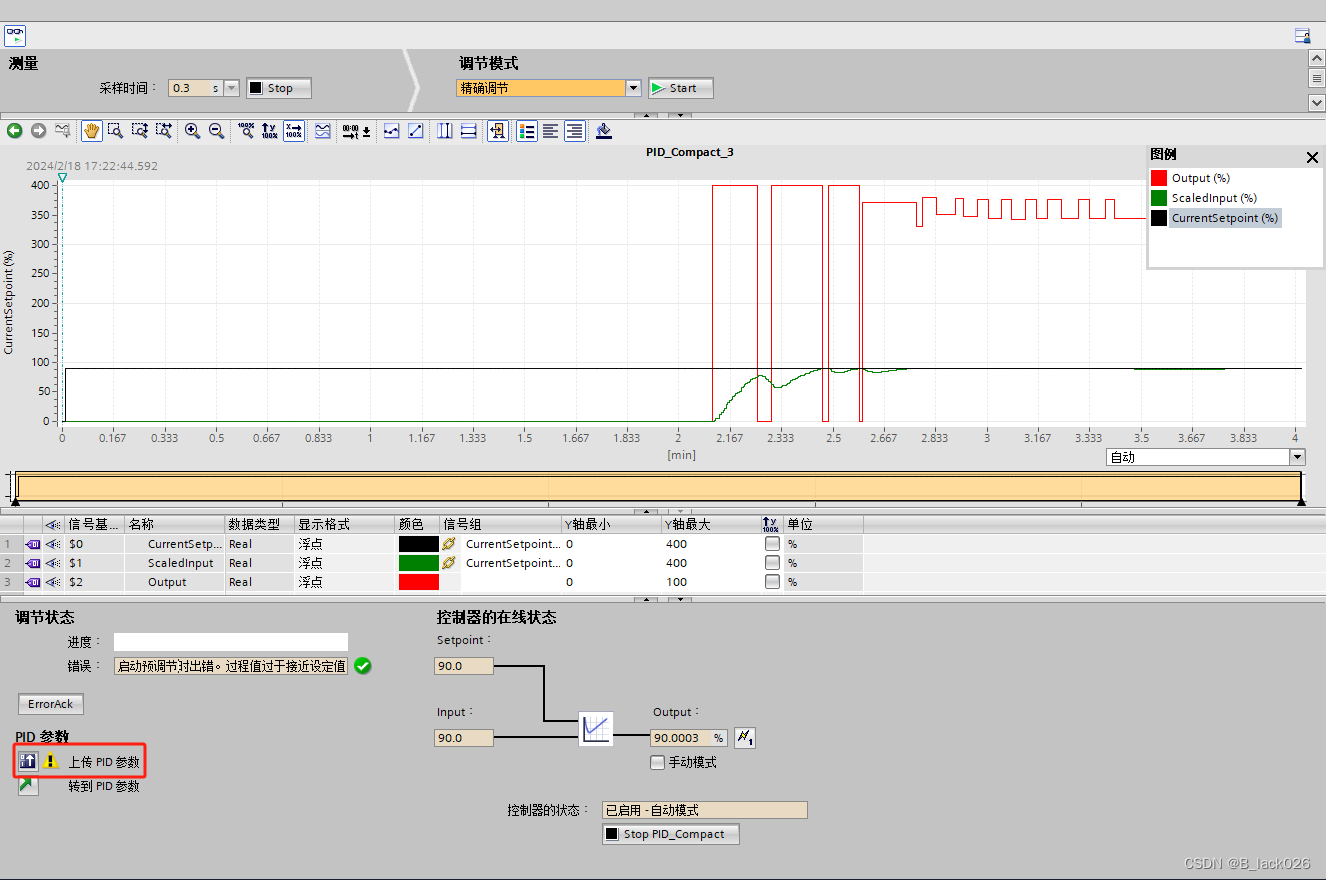
四、串级控制
多个PID控制回路相互嵌套,形成级联控制;主控制器的输出值作为从控制器的设定值,最外层从控制器的输出值应用于执行器;可以迅速纠正控制系统中发生的扰动,显著降低扰动对受控变量的影响;从控制器回路以线性形式发挥作用。因此,这些非线性扰动对受控变量的负面影响可得到缓解。
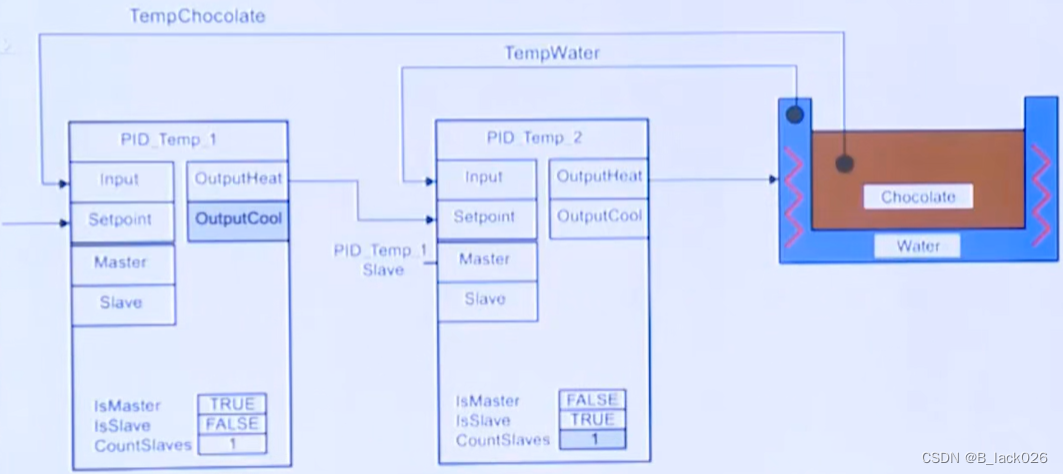 以巧克力加热炉温度控制为例,将巧克力溶液的温度作为主控制器PID_Temp_1的反馈值Input,从上位机获得想要达到的巧克力溶液温度Setpoint,将水的温度作为从控制器PID_Temp_2的反馈值,将主控制器的输出OutputHeat作为从控制器的输入Setpoint,将从控制器的输出OutputHeat用于水温控制,从而通过水温控制巧克力溶液的温度达到设定值。 以巧克力加热炉温度控制为例,将巧克力溶液的温度作为主控制器PID_Temp_1的反馈值Input,从上位机获得想要达到的巧克力溶液温度Setpoint,将水的温度作为从控制器PID_Temp_2的反馈值,将主控制器的输出OutputHeat作为从控制器的输入Setpoint,将从控制器的输出OutputHeat用于水温控制,从而通过水温控制巧克力溶液的温度达到设定值。
1.调用并组态PID_Temp
调用两次PID_Temp功能块,分别作为主控制器PID_Temp_1和从控制器PID_Temp_2,必须先调用主控制器,再调用从控制器,并连接变量; 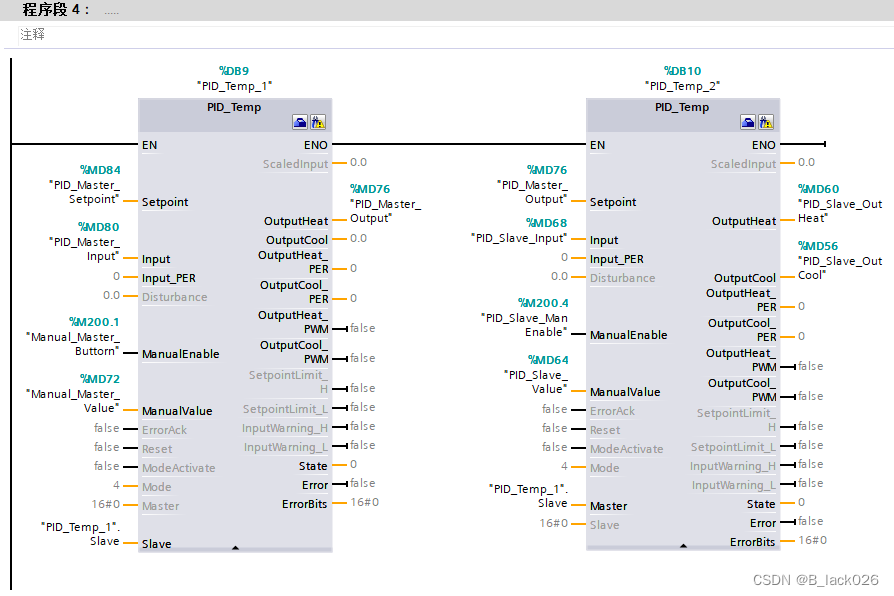 PID_Temp_1组态过程如下所示: PID_Temp_1组态过程如下所示: 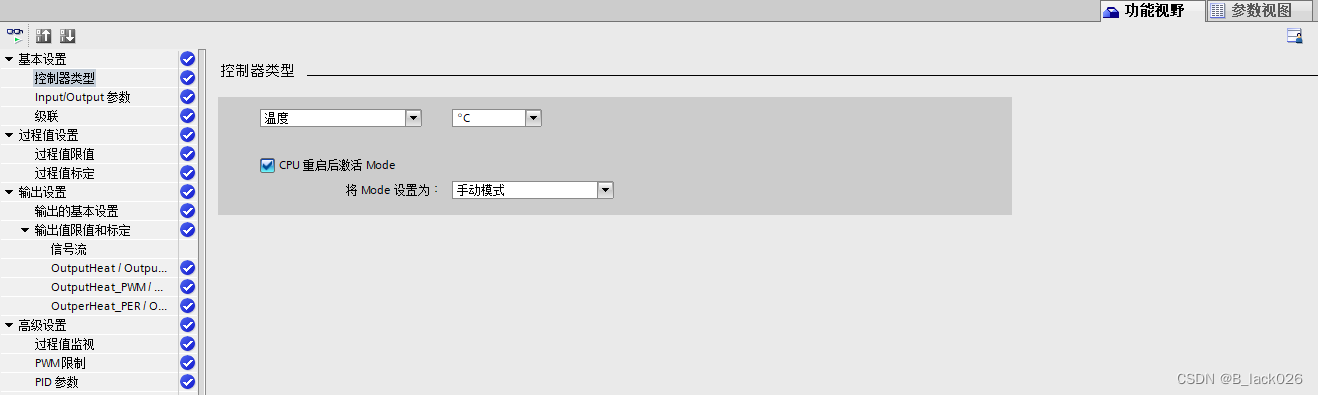 注意:只有在作为从控制器的时候,才可以“激活制冷”; 注意:只有在作为从控制器的时候,才可以“激活制冷”; 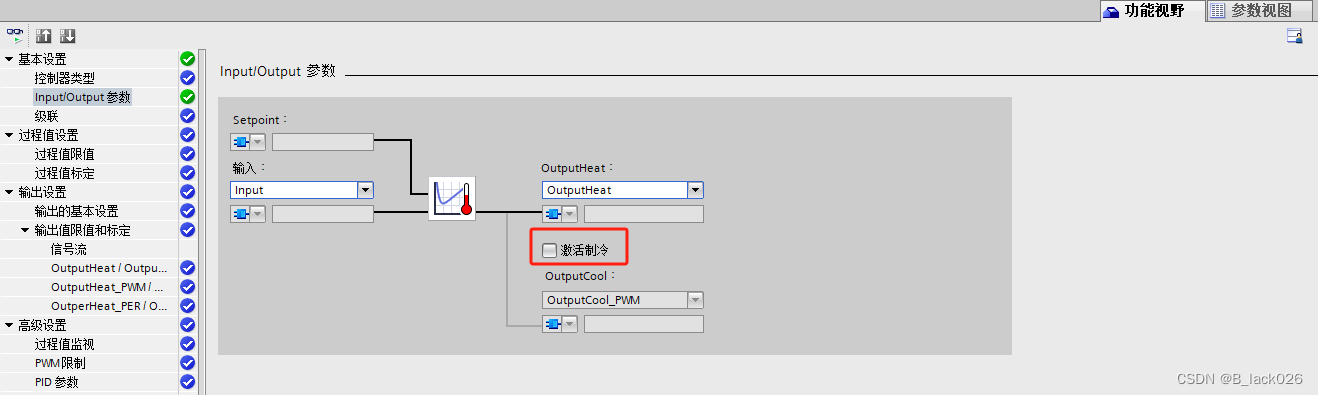 勾选“控制器为主站”,这里从站数量为1,最大可支持255个从站; 勾选“控制器为主站”,这里从站数量为1,最大可支持255个从站; 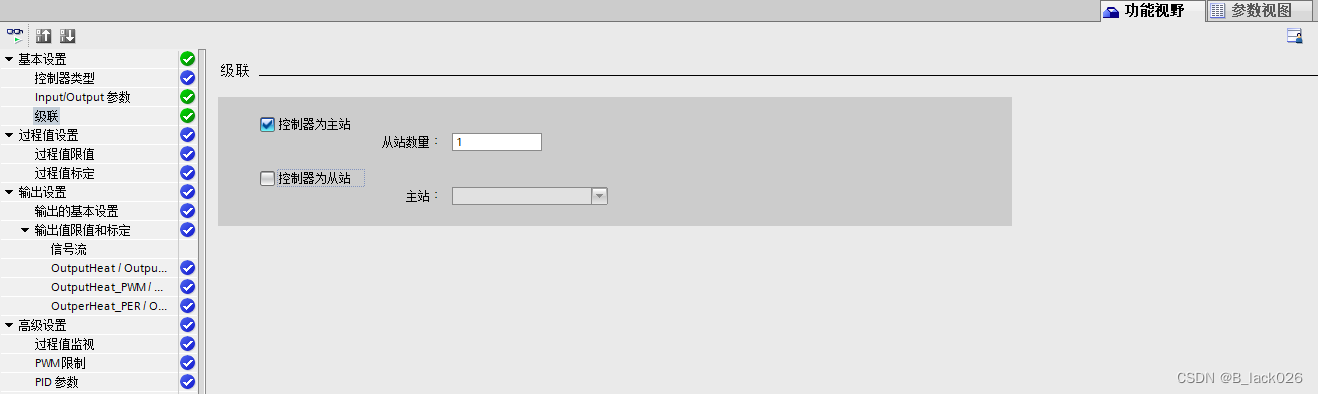 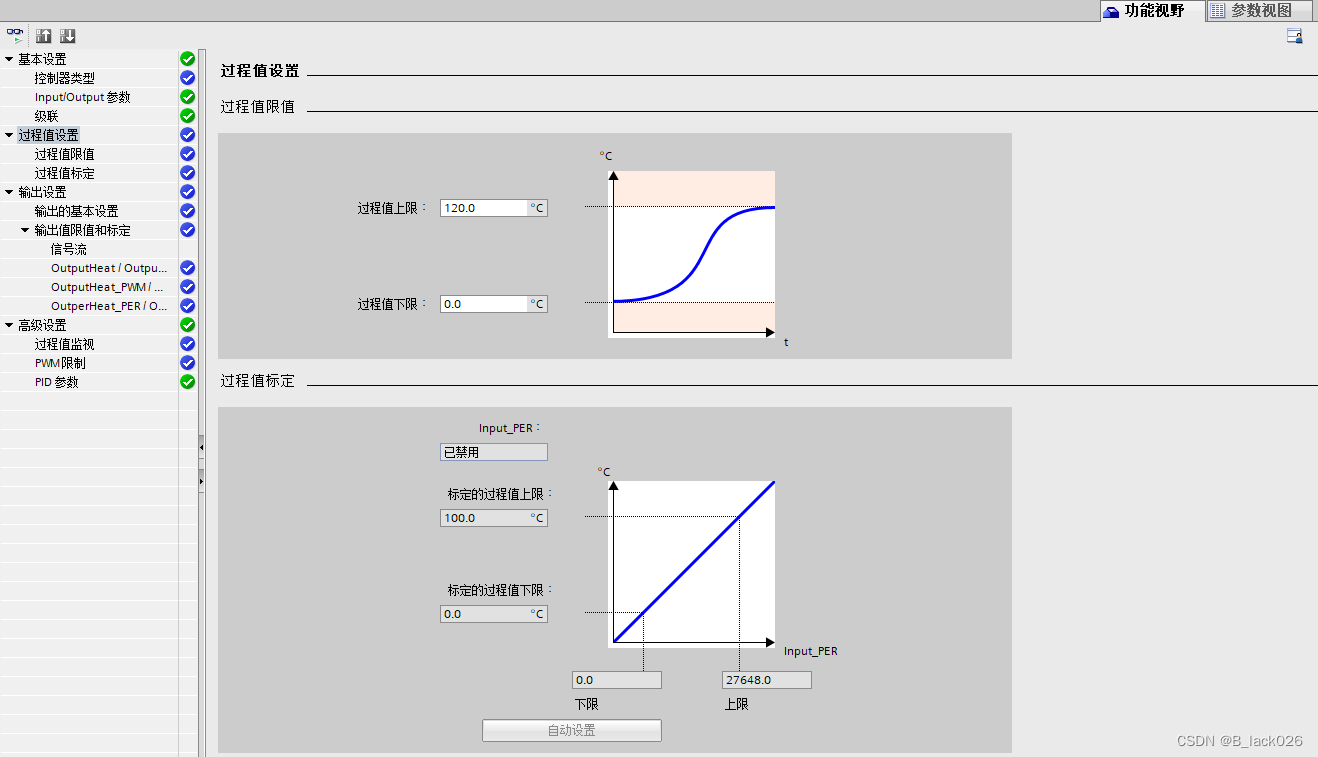 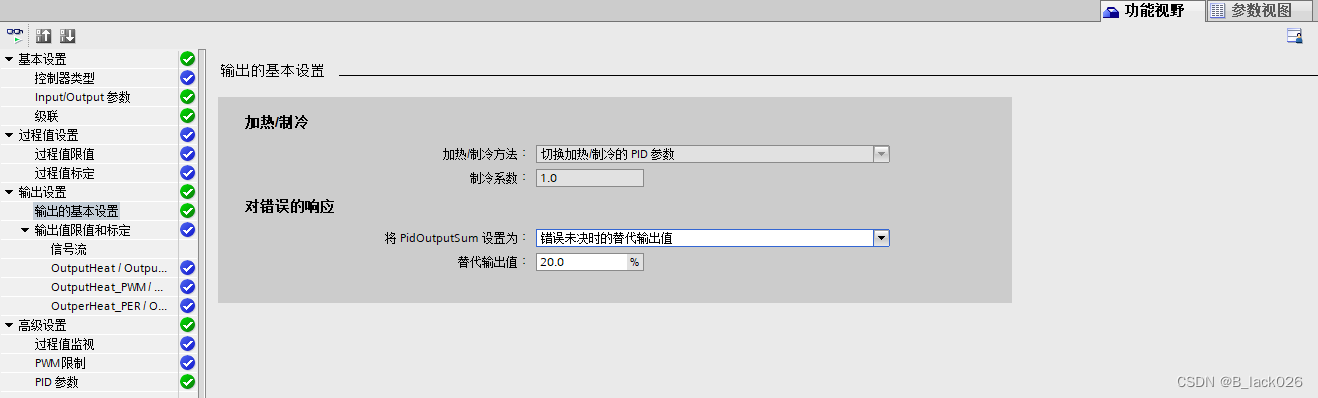  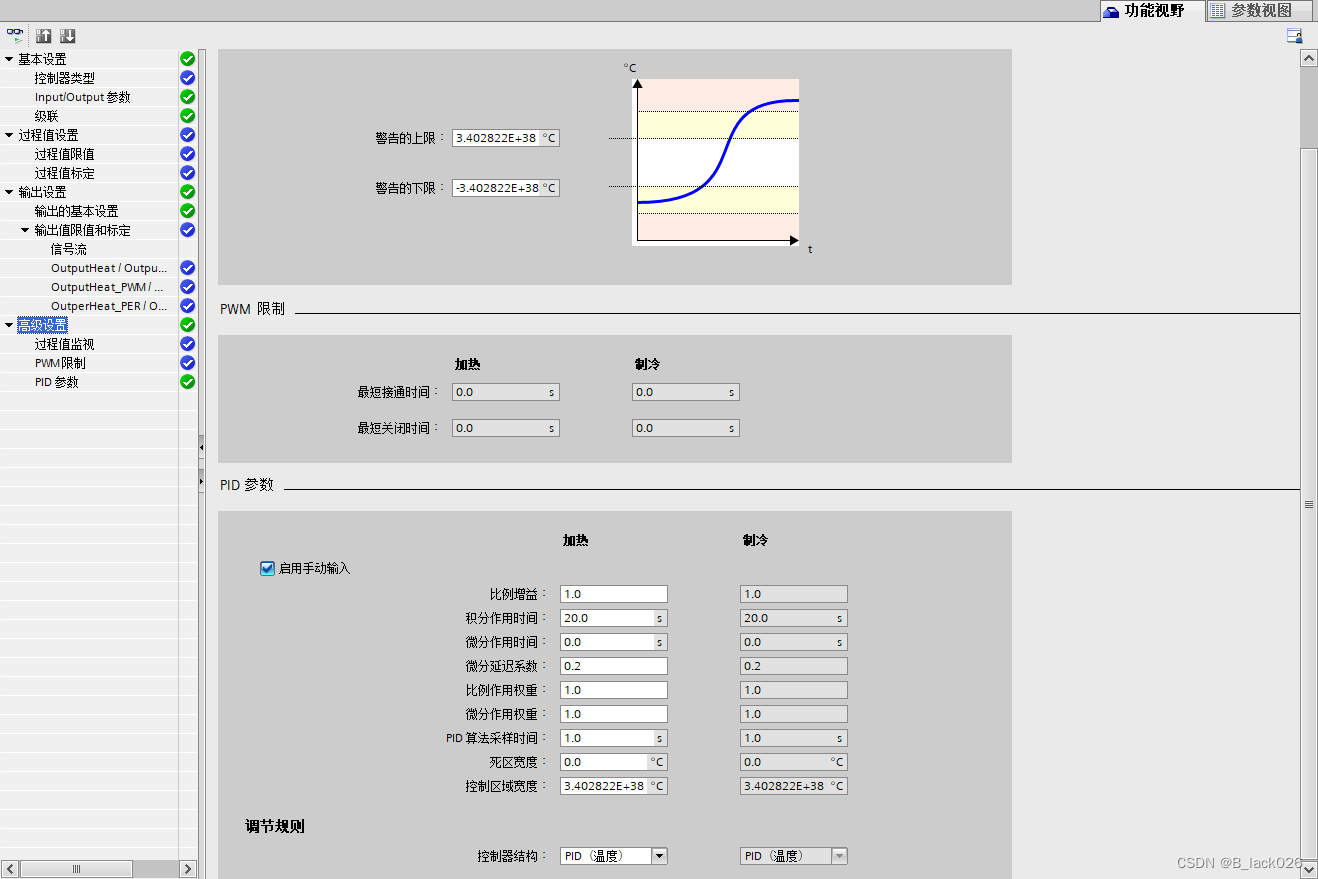 PID_Temp_2组态过程如下所示: PID_Temp_2组态过程如下所示: 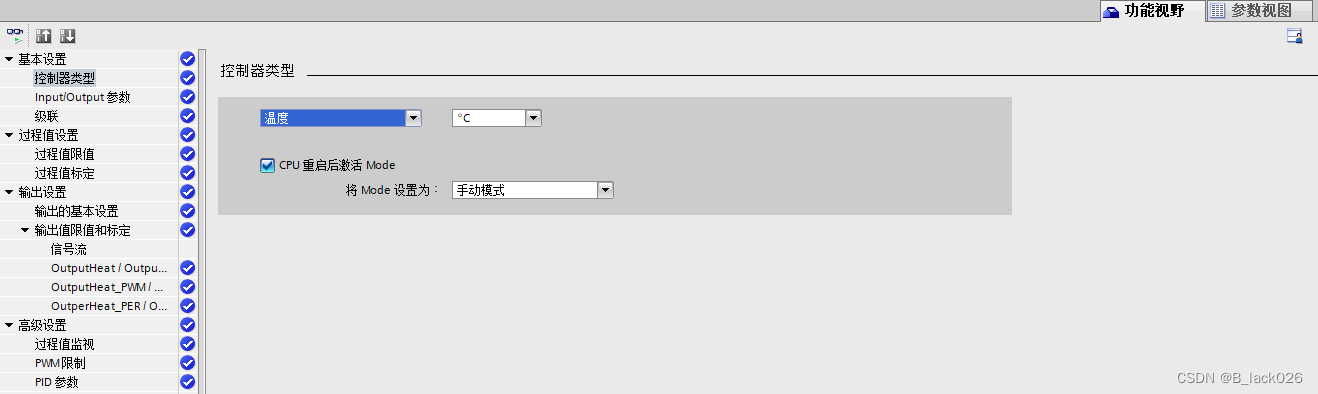 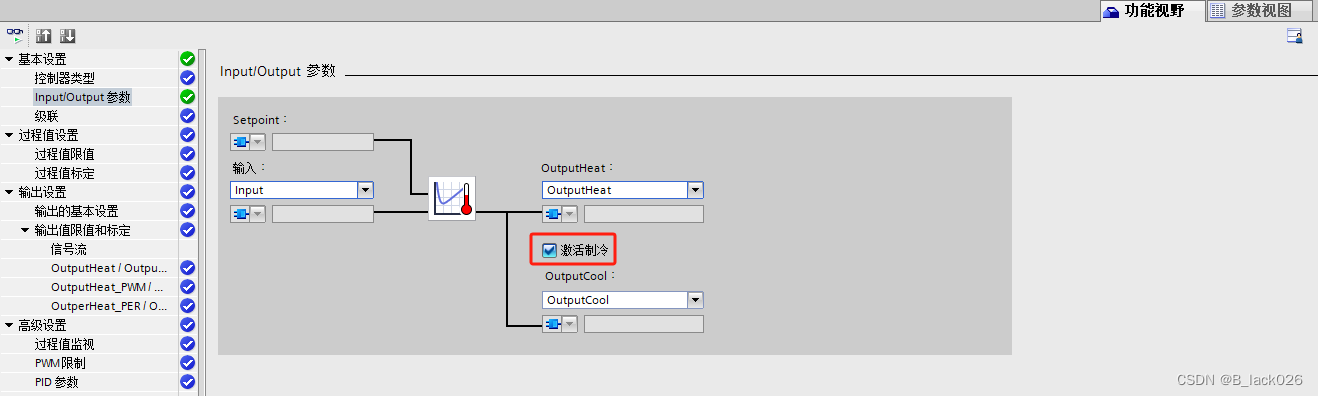 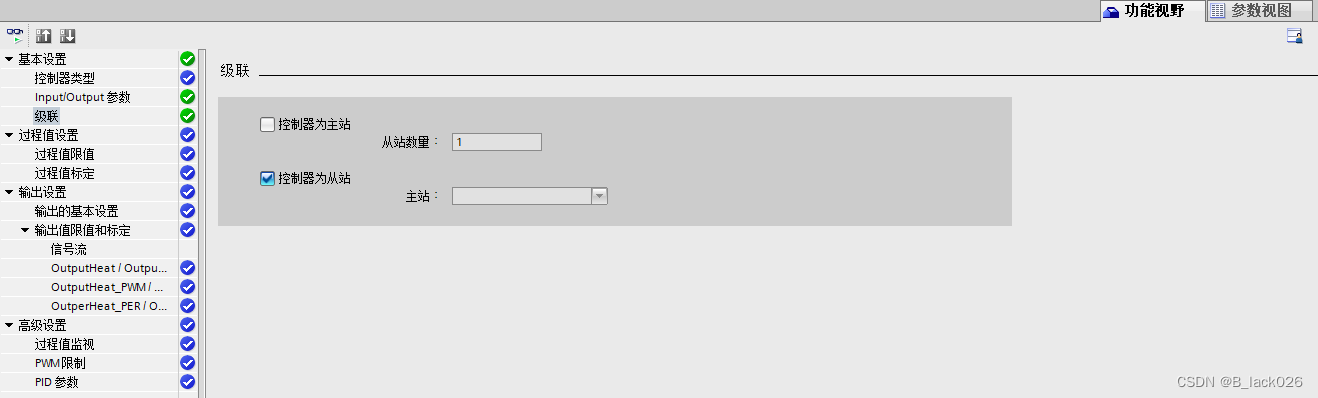 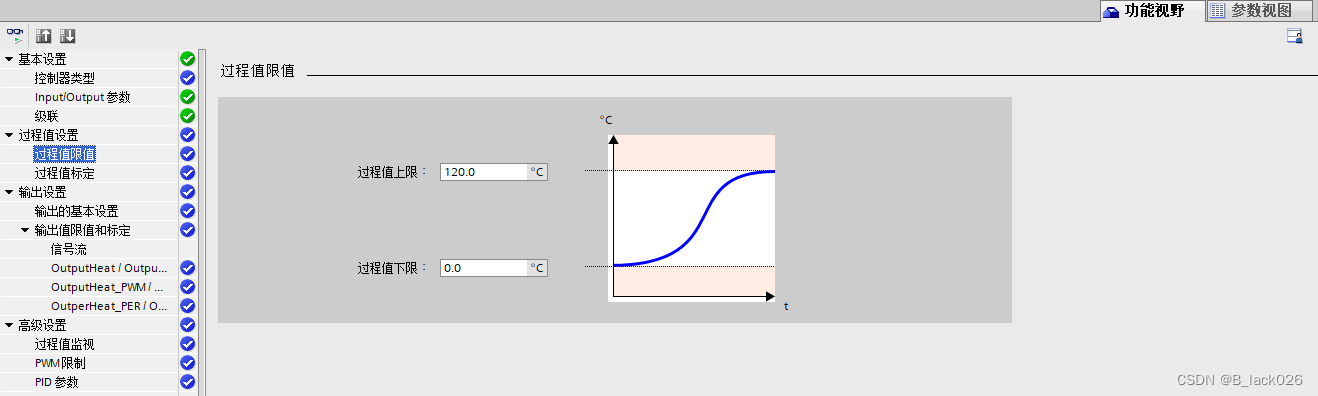 在“输出的基本设置”选项卡中,加热/制冷方法可选择“切换加热/制冷的PID参数”,此时加热和制冷分别自整定;当加热和制冷的变化曲线基本一致时,可以选择“加热/制冷的制冷系数”,此时制冷的PID参数由加热的PID参数乘以设置的制冷系数得到。这里我们选择“切换加热/制冷的PID参数”; 在“输出的基本设置”选项卡中,加热/制冷方法可选择“切换加热/制冷的PID参数”,此时加热和制冷分别自整定;当加热和制冷的变化曲线基本一致时,可以选择“加热/制冷的制冷系数”,此时制冷的PID参数由加热的PID参数乘以设置的制冷系数得到。这里我们选择“切换加热/制冷的PID参数”; 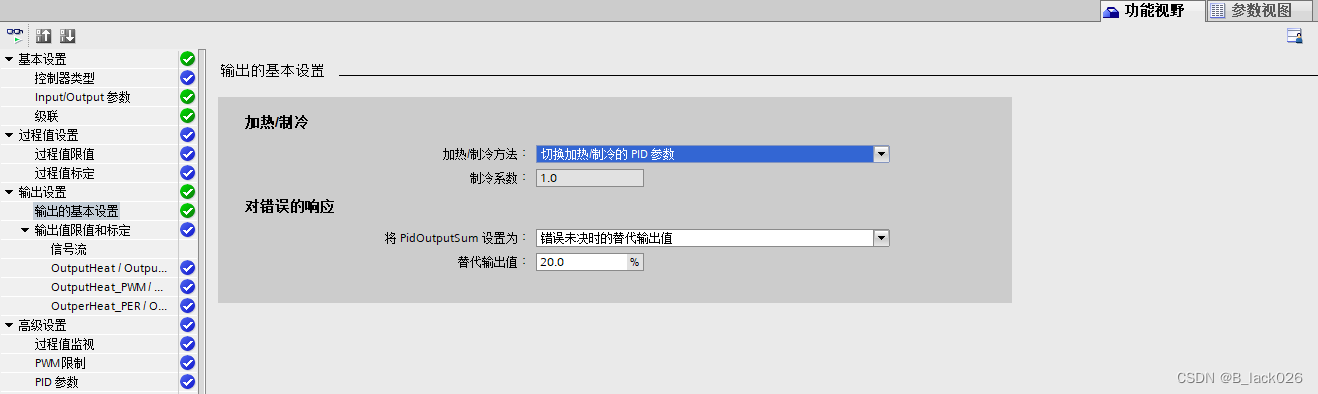 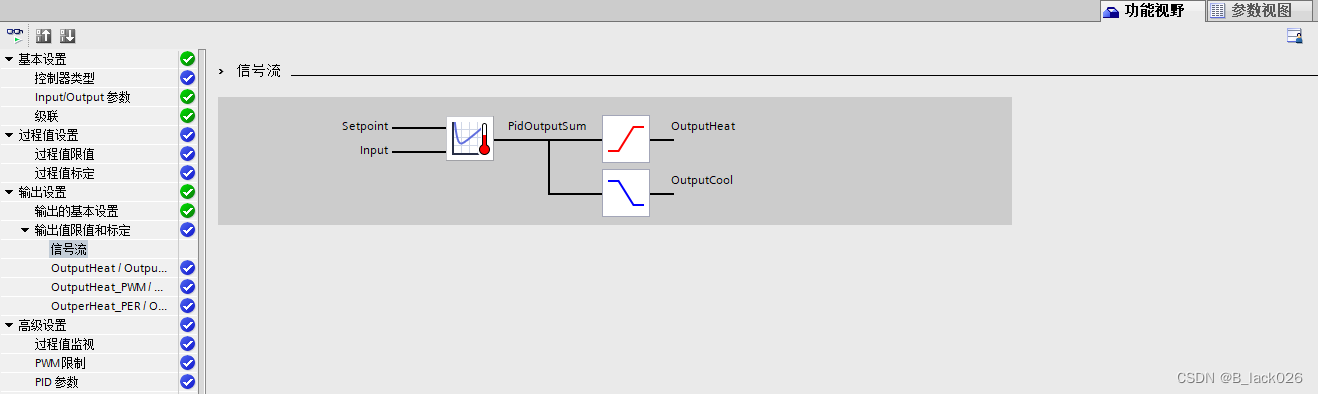 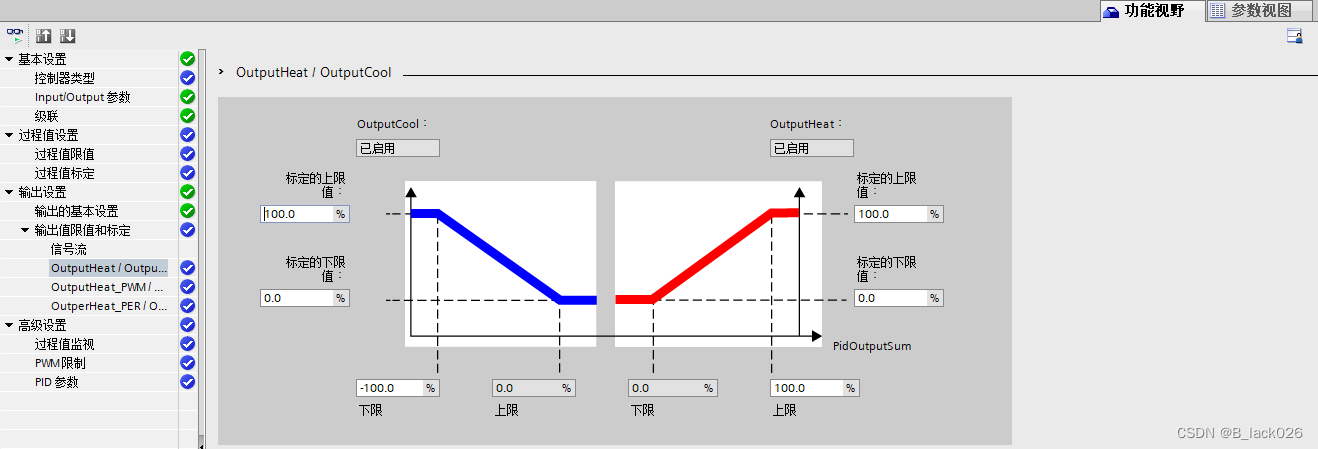 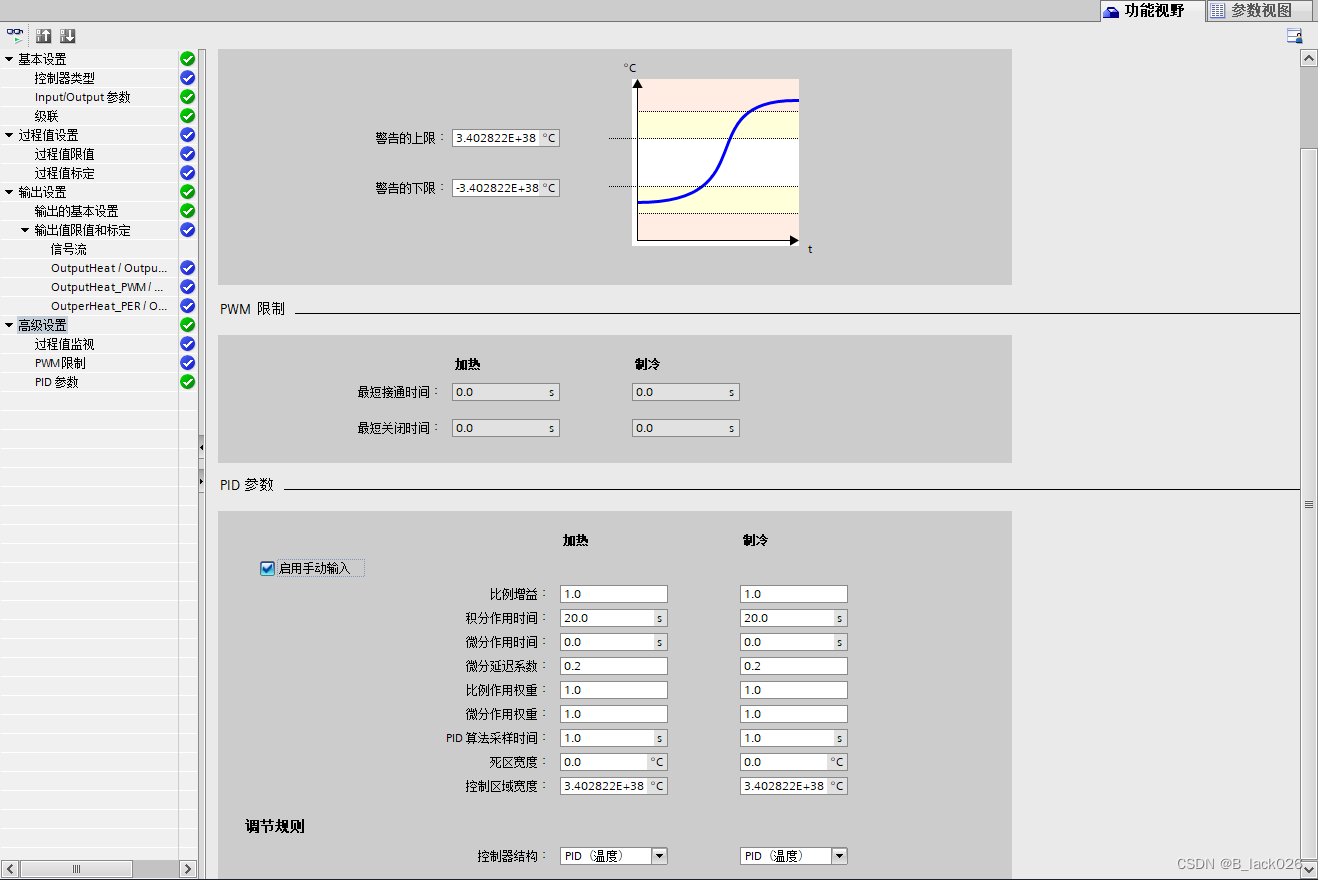
2.调用被控对象仿真块
仿真块下载链接已在上文给出,连接对应变量,同时,将水温反馈值赋值给巧克力溶液温度反馈值。 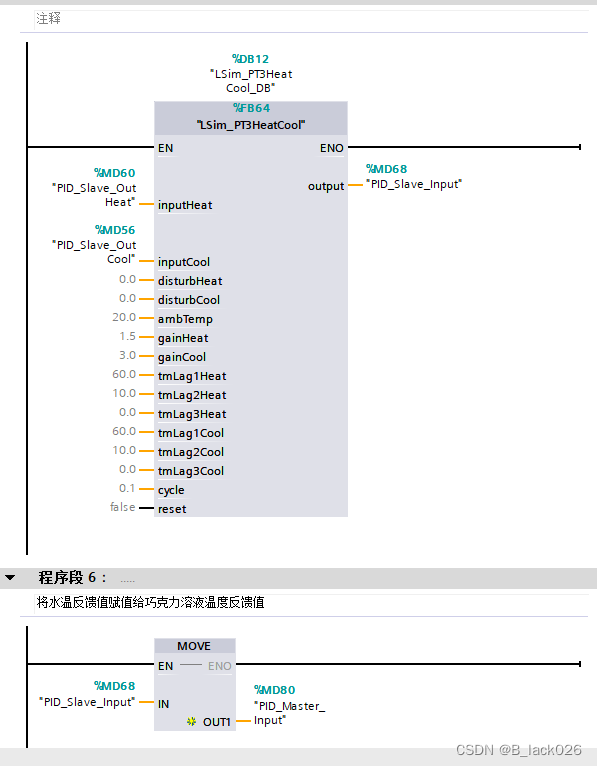
3.进行从控制器预调节加热
预调节常规要求: 1.ManualEnable = FALSE,Reset = FALSE; 2.PID_Temp处于“未激活”、“手动模式”或“自动模式”; 3.设定值与过程值均处于组态的限定范围内。 预调节加热要求: 1.设定值-过程值>(过程值上限值-过程值下限值)×30%; 2.设定值-过程值>设定值×50%; 3.设定值大于过程值。 因为要进行串级调试,故在进行主控制器自整定之前,需要进行从控制器自整定,但从控制器的设定值是主控制器的输出值,无法手动修改,此时,可以用调试面板中的设定替代值作为从控制器的设定值。 打开PID_Temp_2的调试面板,点击测量面板的start按钮,调节模式选择预调节加热,勾选控制器的在线状态面板里的Subst.Setpoint,设定一个满足预调节加热要求的数值,这里设置为80.0,然后点击旁边的闪电按钮,发送给PLC,最后点击调节面板的Start按钮,开始预调节加热。 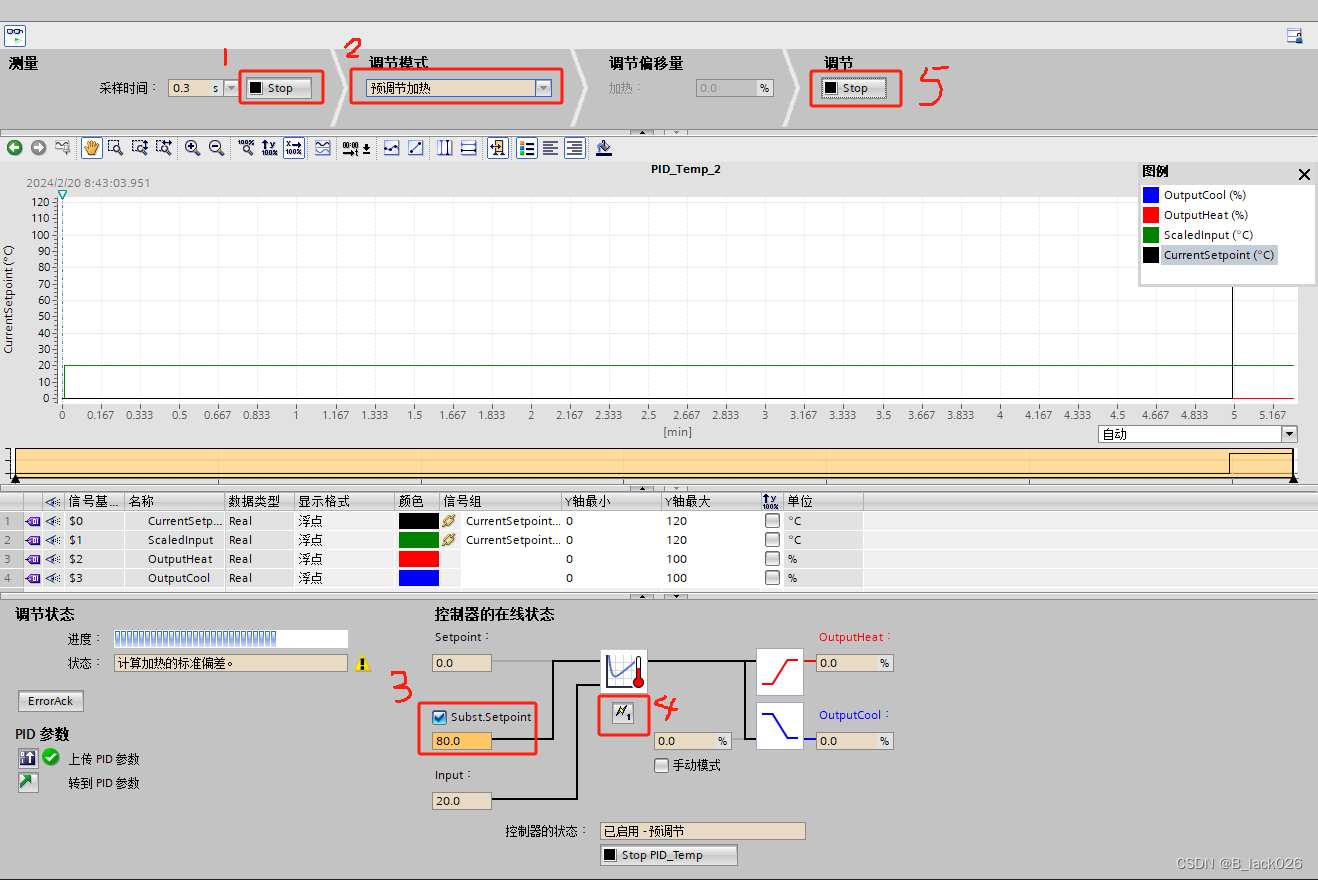 调节状态显示系统已调节表示预调节加热完成。 调节状态显示系统已调节表示预调节加热完成。 
4.进行从控制器预调节加热/制冷
要求同预调节加热。 此例程本步骤省略。
5.进行从控制器预调节制冷
预调节制冷要求: 1.已成功执行了“预调节加热”或“预调节加热/制冷”; 2.设定值-过程值0.0。如果此条件不满足,则需要在精确调节加热前增加制冷偏移量 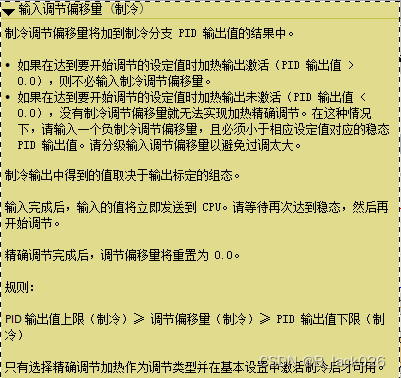 调节模式选择精确调节加热,调节偏移量此时不需要设置,点击调节面板的Start按钮,开始精确调节加热。 调节模式选择精确调节加热,调节偏移量此时不需要设置,点击调节面板的Start按钮,开始精确调节加热。 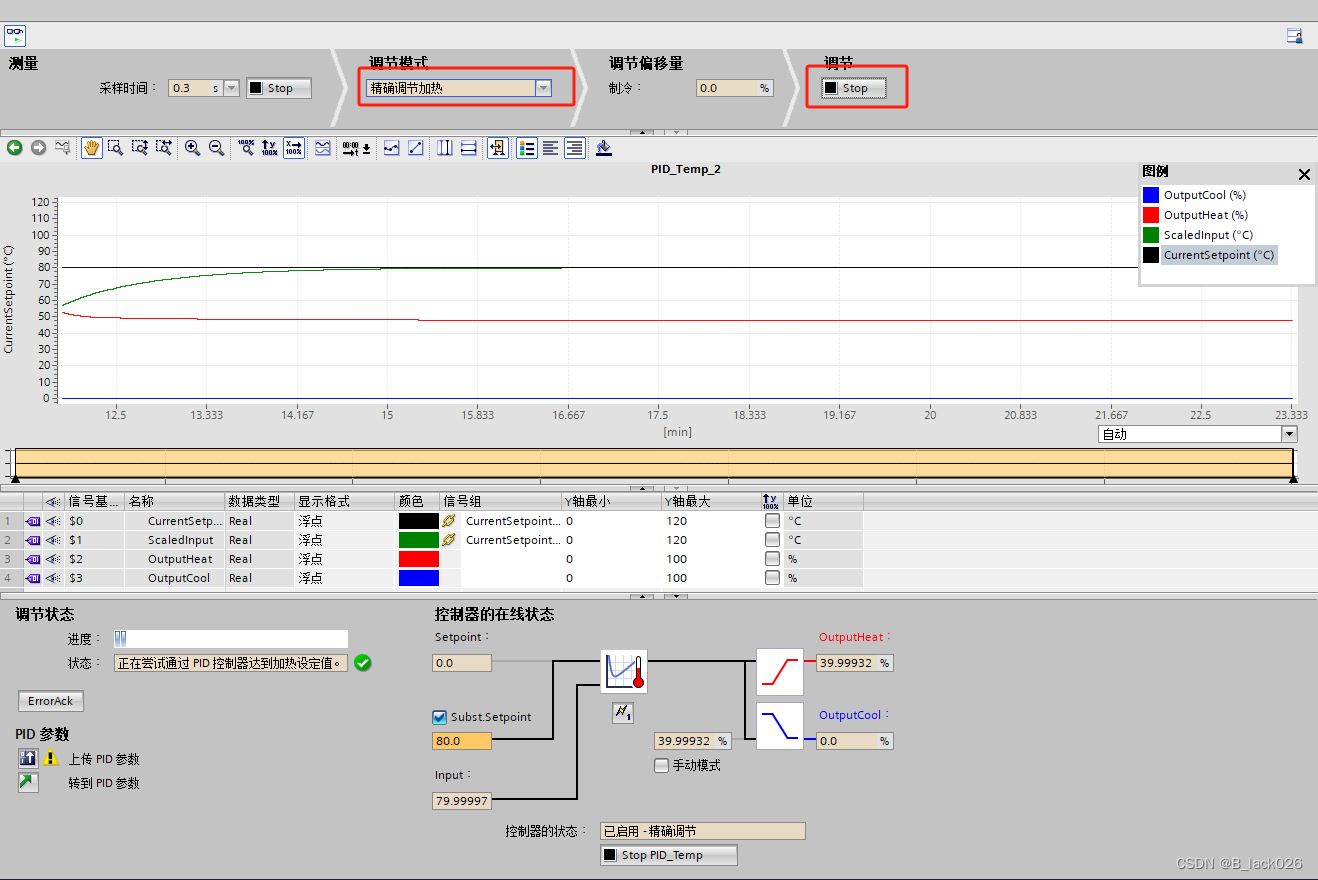 系统调节完毕后,点击上传PID参数。 系统调节完毕后,点击上传PID参数。 
7.进行从控制器精确调节制冷
精确调节制冷要求: 1.Heat.EnableTuning = False;不激活加热自整定 2.Cool.EnableTuning = True;激活制冷自整定 3.PidOutputSum |