深入浅出带你了解四驱控制 |
您所在的位置:网站首页 › 前轮舵机与后轮差速 › 深入浅出带你了解四驱控制 |
深入浅出带你了解四驱控制
|
在道路上,是否经常见到一辆酷酷的车,看上去就是硬汉的车,心想车内走出的一定是壮汉帅哥,亦或是紧身皮衣的美女; 冬天里,是否会看到这样的一台车,驰骋冰雪王国,完成一个个如特技般的漂移动作,看的心痒痒,也想上去操作一番;  它们都属于这样一个家族,四驱车,不是四驱兄弟,而是每个汽车人梦想中完美的座驾。 今天作者带大家深入的了解一下四驱控制的原理。  四驱是汽车发展至追求极致性能后的产物,最简单直接的,对于极限加速能力,四驱>后驱>前驱。  极限通过性能上,四驱车可以尽可能的使用四轮的附着,使车辆更易完成脱困; 极限操控性能上,四驱更容易控制车辆转向姿态,让车辆在弯中获得更大的加速性能且不容易失控。 四驱发展至今,存在两个流派,一个是低速通过型。  低速通过型通常所说的分时四驱就是在某些特定的工况下(低速,转向小)通过牙嵌式离合器和分动箱配合达到四驱的效果,一般工况很少介入,否则会损坏分动箱,典型的比如硬派越野的牧马人。 另一个是高速操控型。  高速操控型是常见的全时、适时四驱,在某一轮打滑时自动将其扭矩降低,并分配在其他有附着力的车轮上,为车辆提供更大的侧向附着力,该类车辆更多用于赛道驾驶,低附操控,典型的比如奥迪quattro,而这一类四驱所依赖的机械硬件就是托森差速器或者电控式多片离合器差速锁等。 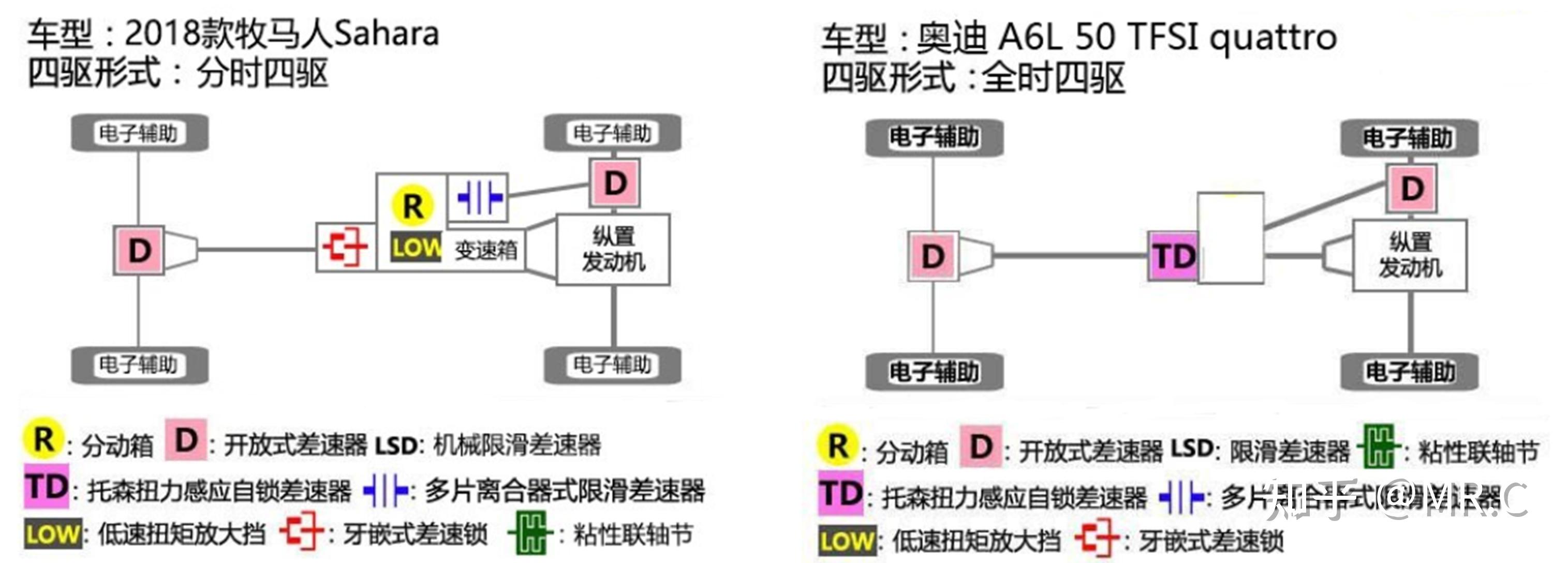 笔者这里先介绍一下托森差速器的工作原理。如下图所示,动力由发动机传输给差速器壳体,然后通过行星齿轮轴带动行星齿轮绕输出轴旋转,再通过行星齿轮与半轴齿轮的啮合将动力传递给输出轴。当两根输出轴间出现速差时,行星齿轮自转实现差速的效果。行星齿轮与半轴齿轮是蜗轮蜗杆传动机构,在传动时会产生内摩擦力矩Mr,Mr又与两个输出轴的转速差相关,因此,速差越大时,就会有更多的动力传输在速度更慢的输出轴上,从而达到扭矩分配的效果。托森差速器基础扭矩分配时50:50,在出现速差后,扭矩分配比例会出现调整,锁紧系数代表了动力分配的比例 。 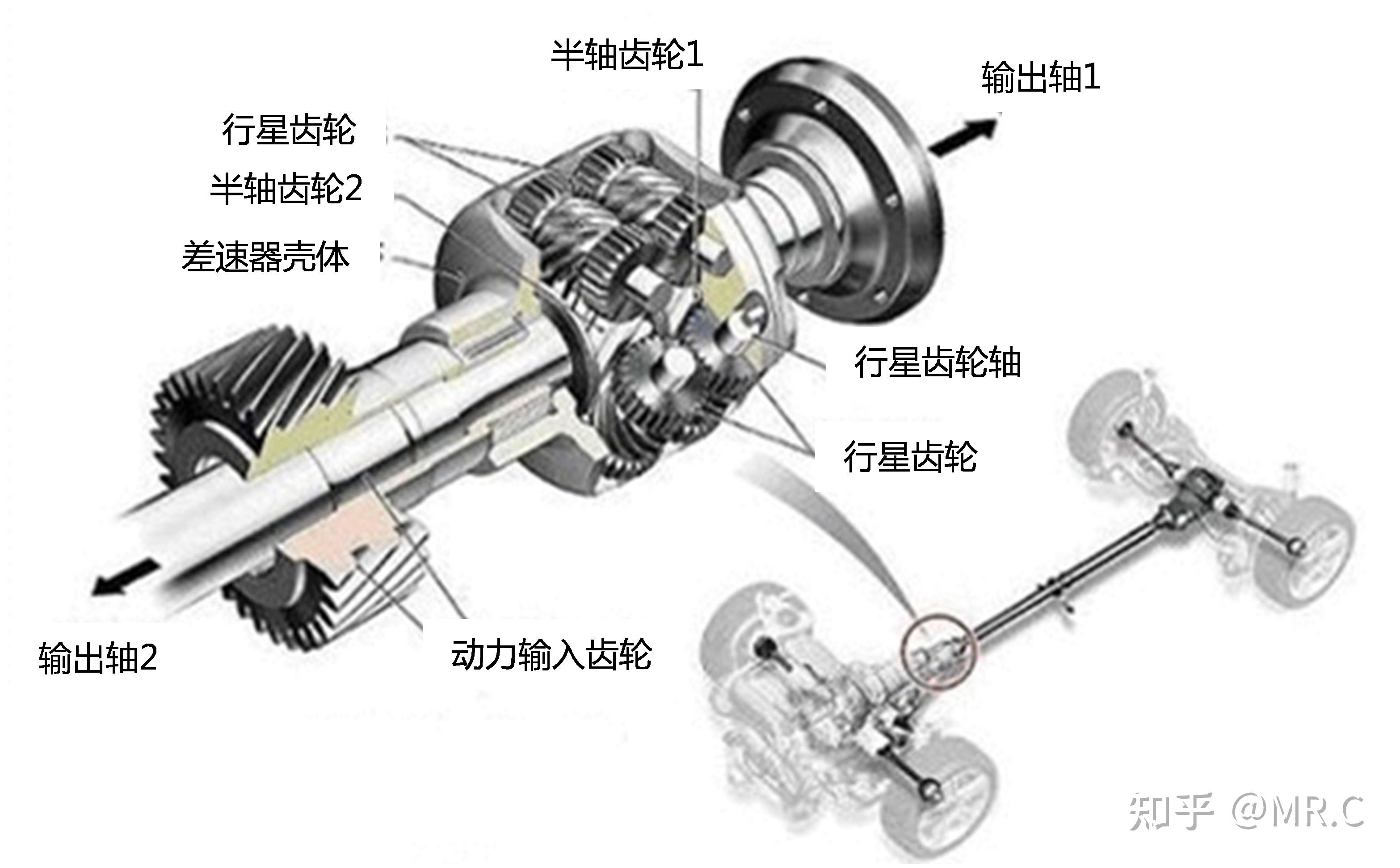 随着发展,奥迪quattro最新一代的结构采用了冠状齿轮中央差速器,同样是由差速器壳体将动力传给四个差速齿轮,再由差速齿轮将动力分别传递给前后桥的冠状齿轮,由于前后桥冠状齿轮齿园直径的不同,基础扭矩分配比例变为了60:40,增大了后轴的基础动力分配,也使车辆驾驶更加运动,更适合赛道,在动态驾驶过程中,扭矩会通过冠状齿轮对摩擦环的压力产生摩擦力,这部分力称之为动态扭矩分配,通过动态分配,前轴最大可达到75%的扭矩分配,后轴可以达到最大85%的扭矩分配,当超出这个范围时,电控将发挥作用,进一步压紧摩擦环,提供动力分配扭矩。  在传统四驱的操控性能方面奥迪quattro一直处于领先的地位。但是随着新能源势力的崛起又发展出了电动四驱,典型的特点就是基于电机体积小易布置等优势在四驱车上搭载2到3个动力源分别驱动每一个驱动轴和车轮,其优势在于电机扭矩控制周期短,控制精度高,更容易控制每一个车轮的转速,且每个车轮动力传输解耦,在转向时不会互相干预,而电机低速大扭矩的特性也提供了低速的通过性能解决方案。 总之,在操控性能上,电动四驱方案不再拘泥于机械结构,而将更多的经历集中在如何合理分配轴间扭矩,电动四驱前后轴扭矩基础分配不必受限于只有50:50或者60:40的扭矩分配,而是完全取决于驾驶员所需的操控性能是否更加运动,甚至可以提供70:30,80:20等等的分配方式,控制过程中扭矩转移的比例也不再受限于速差,而是更自由的分配方式。  自从电动车进军了汽车市场后,优秀的操控性能不再是豪车跑车独有的特性了,随着电动车刷新赛道圈速的新闻越来越多,也进一步验证了电动车四驱控制方面的独有天赋。  总体上看来除去新能源车辆续驶里程及充电问题外,可以说电动四驱是四驱控制方面的最优解决方案,笔者也相信在未来随着新能源车辆的普及,续驶里程及充电问题都将解决。 看到这里,感兴趣的读者一定想知道四驱控制是如何实现的,咱们不妨先了解一下轮胎的基本性能。 基础知识储备 想象平面上的一个质量块,在各个方向上的极限摩擦力相等,连在一起组成了一个圆,称之为摩擦圆,而轮胎是滚动前进的,因此其摩擦特性为椭圆,这个椭圆叫做卡姆圆。 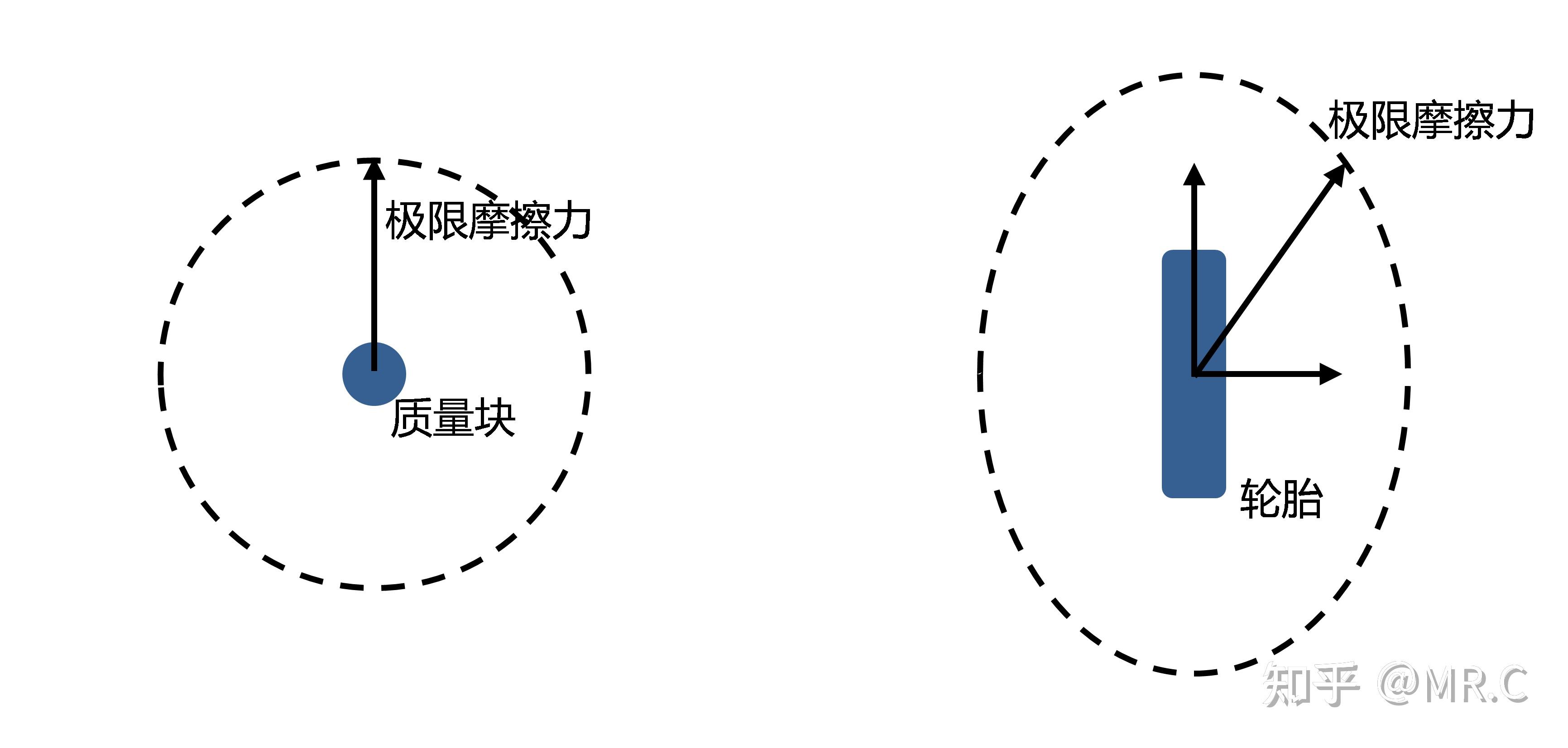 无论何时,当轮胎与地面的摩擦力超出了卡姆圆,轮胎就进入了滑动摩擦状态,在纵向上表现为轮胎打滑,加速打滑表现为轮胎空转,减速打滑表现为制动抱死。  在侧向上表现为车辆侧滑,当然,前轮侧滑会使车辆转向不足,通常称之为推头,后轮侧滑会导致车辆转向过度,通常称之为甩尾,将甩尾控制在一定可控的范围内也就是通常所说的漂移,超出一定范围,车辆也就失控了。  四驱的控制就是通过扭矩与卡姆圆的关系让驾驶员在各种复杂路面下自如的驾驶,更易控制车辆加速并完成漂亮的漂移动作。 四驱控制可以分为纵向和侧向两个部分,首先了解一下纵向控制,纵向控制是指车辆在不同路面上加速、减速过程中,防止车轮打滑和抱死,并提供最优加速性能、减速性能的逻辑。轮胎在加减速时,随着轮端力的增强,轮胎的滑移率也会增大,在轮端力开始增大的过程中,轮胎能够提供的驱动力会随着滑移率增大而增大,此时可以认为是稳定控制区间;在轮端力达到一定值后,滑移率快速增大,而轮胎能够提供的驱动力反而会减小,此时可以认为进入了非稳定区间。因此,纵向控制的目标则是将轮胎滑移率控制在一定范围内,保证轮胎能够提供最大轮端力。  在滑移率控制中,控制对象为轮速,通过参考车速与轮速差变化可以进行PI控制,从而达到高精度滑移率控制的效果。 侧向的车身姿态控制主要有两个手段: 1. 在转向不足时,降低前轴驱动/制动力,提升后轴驱动/制动力,从而使前轴恢复侧向附着,增大横摆角速度;在向过度时反之。 2. 在转向不足时,制动内侧车轮,为车辆提供一个横摆力矩,增大横摆角速度,转向过度时,制动外侧车轮,降低车辆横摆角速度。 四驱控制 为了完成四驱控制,就需要眼与手的配合,眼即轮速、加速度等传感器,用来观测车辆真实车速,车身姿态,手即各驱动电机输出的动力,合理控制每只手上的力量,让车辆可以稳定驾驶。 无论是纵向与侧向的四驱控制,控制逻辑架构基本是一致的,都是由参数估计+扭矩计算+干预分配三部分组成,而参数估计模块就是四驱控制的眼睛,以下就是眼睛需要看到的信息:  另外,四驱车轴间扭矩分配控制方式有很多种,从结构上,有通过机械托森差速器被动分配扭矩的,有利用分动箱离合器等主动向另一轴传递扭矩的,从控制上,有基于期望车身姿态和实际姿态进行扭矩比例分配的,也有利用轴间速差进行扭矩比例分配的。电动四驱与传统四驱车最大的区别也是优势: 1. 电机控制精度高,扭矩响应精准,可以模拟传统四驱硬件特性,同时还可以实现硬件特性以外的控制,比如基础分配比例可以做到更加运动的分配方式。 2. 电控四驱为多动力源控制,可以保证轴间或者轮间的动力解耦,也就是说可以做到前后轴间扭矩0:100,100:0的分配方式,且扭矩分配的比例和速差解耦,转向轮与非转向轮在转向未打滑时产生的速差不会引起扭矩分配比例的变化。 下图所示是轮胎在不同滑移率下纵向及侧向附着系数的关系图,随着滑移率增加,侧向附着系数会不断减小,而侧向附着系数影响着前后轴的侧向力,根据车辆的二自由度模型可以轻易得到结论,在车辆出现转向不足或者转向过度时,提供更多的侧向力,有助于帮助车辆中性转向,因此滑移率对车身姿态的调整也很重要。因而笔者认为最优的控制方式就是通过滑移率来控制车辆的加速及车身姿态。 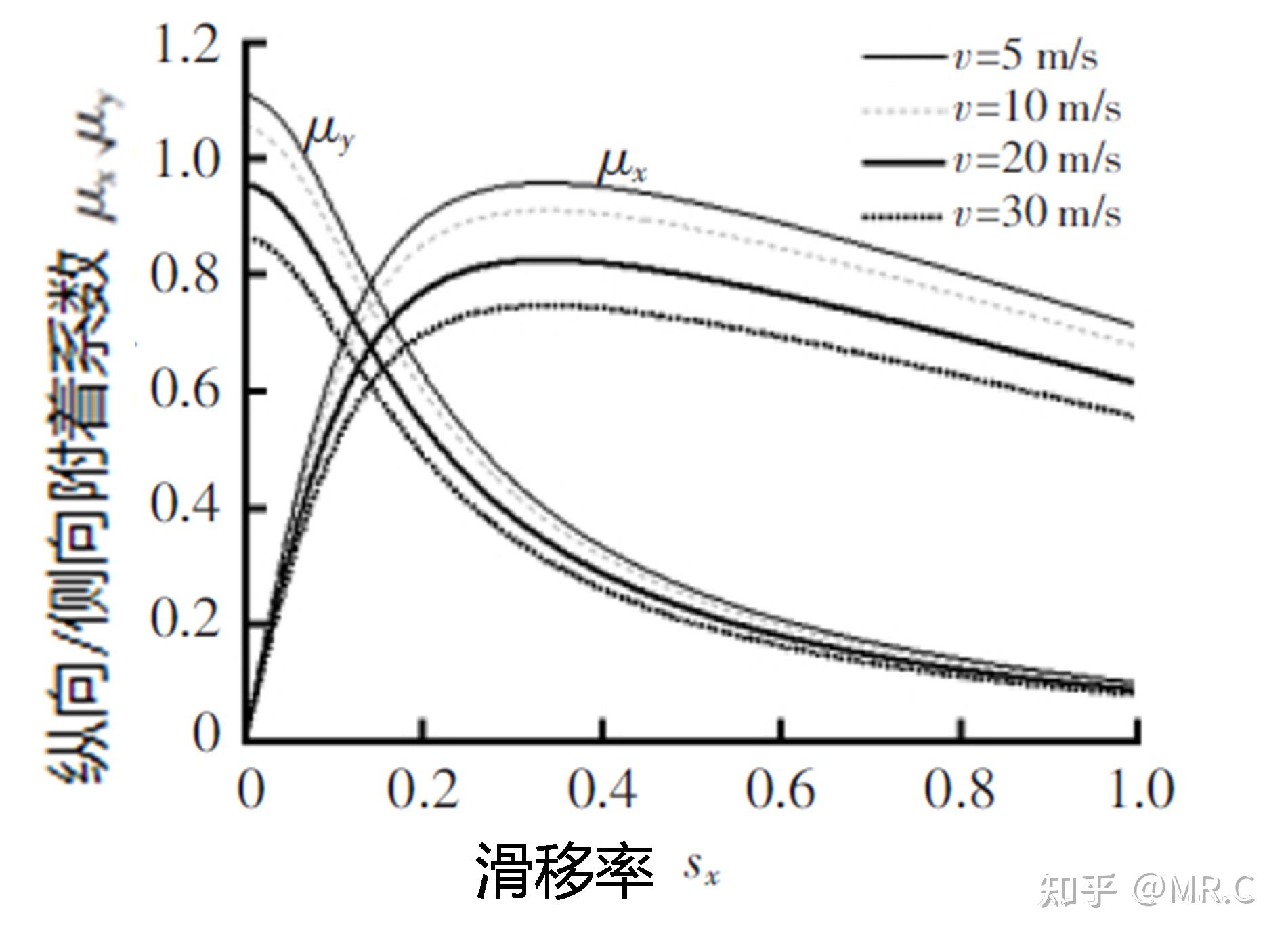 电动四驱车辆通常使用双电机分轴四驱控制,在控制过程中可分为两个阶段: 1. 未出现轮胎打滑的情况,通过状态参数估计得到前后轮胎的卡姆圆,并根据前后轴侧向力求得最佳纵向扭矩分配比例;在出现转向不足或者转向过度时,分别向后轴和前轴转移扭矩。 2. 出现轮胎打滑后的情况,在出现轮胎打滑后,优先使用轮胎的滑移率控制,根据转向不足和过度的程度、驾驶模式的偏好以及路面附着的识别,设定前后轴滑移率控制目标,进而调整轮胎侧偏角,达到调节车身姿态的目的。  如果能采用三电机左右车轮四驱控制,则有更多车身姿态调节方式,通常三电机四驱车会采用前轴单电机,后轴双电机分别控制左右车轮的方式,在车辆出现转向不足或者转向过度时,通过后轴左右车轮驱动/制动力分配,主动调整车身的横摆力矩,进而对车身姿态调整,这一过程通常称之为扭矩矢量控制,通常扭矩矢量控制是ESP控制车身稳定的手段,但是由于电机有控制精度高,响应周期短的优势,在转向时,三电机四驱控制会有更好的操控性能。  转向过度时后轮双电机扭矩分配产生主动横摆力矩调整车身姿态 转向过度时后轮双电机扭矩分配产生主动横摆力矩调整车身姿态以上就是电动四驱控制的基本方法。最后,一个优秀的四驱控制还需要有工程师们在背后所做的努力,通过不断的尝试,寻找出最优的操控性能参数,车手们每一次在过弯时飘逸的车身姿态,完美的过弯曲线,都是工程师们在各种路面下不断的过弯与尝试所留下的汗水,为了追求人车合一的境界,工程师们敏感的神经就像是高精度传感器一样,经过运算,调试出一台台优秀的座驾。 最后的最后,感谢兄弟盟的捧场,笔者会一如既往的为大家带来更多技术解读。 作者:9哥 |
【本文地址】
今日新闻 |
推荐新闻 |