【工业相机】【深度2】相机靶面大小和测量精度的关系分析和计算:@opencv |
您所在的位置:网站首页 › 像素μm › 【工业相机】【深度2】相机靶面大小和测量精度的关系分析和计算:@opencv |
【工业相机】【深度2】相机靶面大小和测量精度的关系分析和计算:@opencv
|
前言:本文分析工业相机的靶面、镜头和精度的约束和相关关系:所谓工业相机(整机)这里指的是:相机 + 镜头。 我们先把各个参数列个表述。整机参数分别由相机和镜头参数联合决定。本文略过基础知识, 阅读者需具备基本视觉知识 非常透彻的 介绍了几乎所有常用的相机参数计算选择工具 下表,列举了工业相机的主要参数:值得注意的是,工业相机最终表现出来的参数,是由相机参数和镜头参数,以及外部条件约束,组合起来的。有些参数,相机机身有,镜头有,有的是联合表述。 这些参数要搞清楚,才不会混淆,导致计算错误。 内部参数参数 相机整机参数举例、单位相机机身参数举例 镜头参数最终决定说明像素相机像素1920*1080 (pixel)分辨率百万量级200万(2073600)(pixel)镜头和传感器低者分辨率 (resolution)分辨率(ODS) optical delivery system 传感器像素点物方分辨率像方分辨率lp/mmMTF/ Contrast0.3 的MTF亮度值是底线靶面尺寸靶面尺寸 1/3英寸 传感器感光面积1/3英寸外部参数(测量需求)WD镜头到相机距离测量精度(accuracy)测量的最小物体大小0.02 mm/pixel 准备知识1:相机像素和分辨率像素和分辨率的关系 准备知识2:图质量和精度的决定因素:对机器视觉而言,3个决定因素: 相机: 分辨率、传感器类别类别光学镜头:工作距离,焦距 光照:光照均匀度、 光强、降低杂散光、背景噪音 准备知识3:应用场景:2D 读码
零件测量【距离】
缺陷检测【光照为最关键】
视觉导航
装配
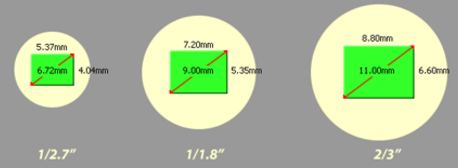
白圈表示光导摄像管成像区域,绿色部分表示CCD/CMOS靶面区域:
【表一】 二,计算方法汇总: 2.1 放大倍数的计算方法 标识输入参数举例FOV(H)物距视野Hd物距下相机水平视野33cm(CMOSH)靶面尺寸1/4查表一: D = 4 mm V = 2.4mm H = 3.2 mm 输出参数Md物距放大倍数=0.0096Md = CmosH / FovH = 3.2mm / 330mm = 0.0096 2.2 视场的计算方法 2.1.1 工业相机实际计算的视野(长边)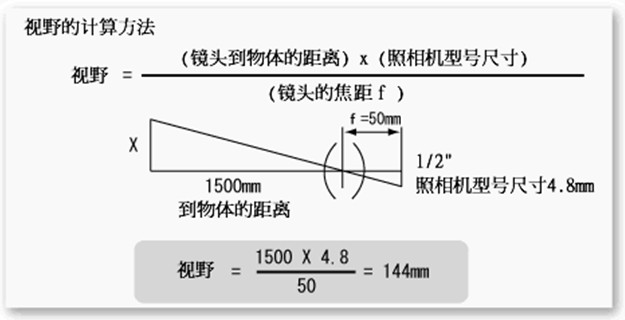 标识输入参数举例物距 u镜头到物体距离60cm靶面尺寸1/4
标识输入参数举例物距 u镜头到物体距离60cm靶面尺寸1/4 查表一: D = 4 mm V = 2.4mm H = 3.2 mm 焦距 f8mm输出参数视野 X240mm
X = (600) * 3.2 / 8mm = 240 mm 公式应用:已知被测物长边330mm,焦距8mm,相机传感器长边3.2mm,需要的镜头到物体距离: 330*8/3.2 = 825mm 反求焦距如果已知物体拍摄尺寸,比如330mm,和距离600mm, 相机靶面大小3.2mm,求焦距: F = 600*3.2 / 330 = 5.8 mm 2.1.2 镜头视野; 2.2 FOV-Part分辨率的计算 相机所需最小分率计算[案] - 视野下能否拍最小的物体 - 传感器靶面像素需求计算方法-缺陷和物体检测计算方法和举例:[Franklin案】When we are designing a machine vision system, two of our most important considerations are the sizes of the part and the defect. That is, what is our Field of View (FOV)and within that FOV what is the smallest defect we can reliably detect?Let’s say the part is 40mm square and we need to detect a .02mm defect. The following formula determines the camera resolution required: FOV/ Defect size = Number of gradations (pixels) 40mm/ .02mm = 2,000 标识输入参数举例FOVFOV12寸(30.38cm)Cmin物体需要在靶面上占据3到5个像素点(最少2个)Smin(Accuracy)最小被测量物体大小:0.25寸(0.635cm)输出参数某方向 像素需求相机分辨率144 pixel 公式2.2
【Franklin案】这里FOV,理解为测距离的长边上。 举例2:测试的长边为:330cm,测试的物体最小长边为:3cm,计算: 330/3*4 = 440 pixel ,选用640相机可以满足要求 举例3: 2.3 [案】 - Defect是否满足相机的精度能否满足需求 - 传感器靶面像素需求计算方法-测量和抓取应用计算方法和举例:determines the camera resolution required: 标识输入参数举例相机分辨率 Nh 640FOV(H)FOV(H)330mmFOV(H)FOV(H)2寸(5.08cm)精度要求 D Defect 最小测量精度要求0.05 mm精度要求 D Defect 最小测量精度要求0.01寸输出参数最大精度能否达成?0.0031寸 < 0.01寸 可以达成某方向 像素需求相机分辨率144 pixel 公式2.3 determines the camera resolution required: 已知被测物需求精度,求相机分辨率 FOV(H) / D 举例:测试的长边为:330cm,测试的精度要求为0.05mm,相机精度要求为 330/0.05 = 6600,当然,选用640相机不可以满足要求 公式2.3-2 determines the camera resolution Enough or Not: 已知相机分辨率,看是否满足要求 FOV(H) / Nh = 2/640 举例:测试的长边为:2寸,测试的精度要求为0.01寸,计算:640 * 480 能否满足精度要求。 2/640 = 0.0031,选用640相机可以满足要求 小结:提高精度和减少FOV的办法,多个相机:
靶面尺寸 S 1/4查表一: D = 4 mm V = 2.4mm H = 3.2 mm 输出参数Md物距放大倍数=0.0096 公式3.1 Md = S/Hd = 3.2mm / 33cm = 0.0096 3.1.2 精度倒算-镜头放大倍率计算 标识已知输入参数举例C单位转换 um -> mm1000S相机像元尺寸(相机型号尺寸)4.8 μm × 4.8 μmHmin需求精度 被测物体最小高度0.05 mm2奈奎施特采样参数>=2 输出参数M放大倍数0.096R分辨率 - 每毫米可以排列的
4.8÷(0.05×1,000)=0.096 【Franklin案】 这两个方法,一个站在要拍全物体角度,一个是要拍到最小物体角度。那么到底用哪个来衡量? 我们倒算一下,就是已知放大倍数,求可辨别测量精度: R = S / M = 4.8 / (C * 0.096) = 0.05 mm = Hmin R = S / M = 4.8 / (C * 0.0096) = 0.5 mm > H min 也就是满足全尺寸的拍摄的话,最小精度不能满足。 3.1.3 分辨率倒算-镜头放大倍率计算S = 1/(2*0.1*M) = 1/(2*0.1*0.096)= 52 lp/mm S = 1/(2*0.1*M) = 1/(2*0.1*0.0096)= 520 lp/mm 四、速度 - 针对速度和曝光时间,产品是否拖影影响:已知:检测范围FOV 为 80 mm *80 mm ,200万像素CCD(1600 *1200),相机或产品运动速度 12M/min = 200mm/s 4.1 曝光时间计算:T = FOV(H) / (S*R) = 80/ (1600 * 200) = 0.00025s 标识已知输入参数举例FOV(H) 长边视野范围80 mm *80 mmS 相对速度200mm/sR分辨率(H)1600输出T曝光时间0.25ms 参考:1 史上最全的工业相机CCD/CMOS靶面尺寸规格说明 史上最全的工业相机CCD/CMOS靶面尺寸规格说明_景通仪器 2 工业相机基本参数以及选型参考(二) 工业相机基本参数以及选型参考(二)_-牧野-的博客-CSDN博客_工业相机参数 3 相机的像素精度,物理定位精度,亚像素定位之间的关系和进行像素的固定误差累积 相机的像素精度,物理定位精度,亚像素定位之间的关系和进行像素的固定误差累积-工业视觉/halcon-少有人走的路 4 分辨率,精度,公差的关系 视觉检测 分辨率,精度,公差? | 基恩士中国官方网站 5 工业相机视野与分辨率计算(相机选型与计算) 工业相机视野与分辨率计算(相机选型与计算)_Three_ST的博客-CSDN博客_相机视野和分辨率的关系 6 工业相机镜头焦距、工作距离、视野等选型的计算 勇哥的视觉实验:工业相机镜头焦距、工作距离、视野等选型的计算-视觉实验-少有人走的路 7 相机焦距与视场角 相机焦距与视场角_白水煮蝎子的博客-CSDN博客_相机视场角 8 我的参考 【深度1】工业相机的选择:- 镜头- 详细例子_Franklin的博客-CSDN博客_工业镜头分辨率怎样匹配相机 |









 = 144
= 144 
【本文地址】