PLC的六轴机器人:信捷XD3梯形图+C语言示较器结合维纶通触摸屏操作技巧,基于信捷XD3的PLC六轴机器人控制系统设计与实现 |
您所在的位置:网站首页 › 信捷plc与维纶通通讯的区别 › PLC的六轴机器人:信捷XD3梯形图+C语言示较器结合维纶通触摸屏操作技巧,基于信捷XD3的PLC六轴机器人控制系统设计与实现 |
PLC的六轴机器人:信捷XD3梯形图+C语言示较器结合维纶通触摸屏操作技巧,基于信捷XD3的PLC六轴机器人控制系统设计与实现
|
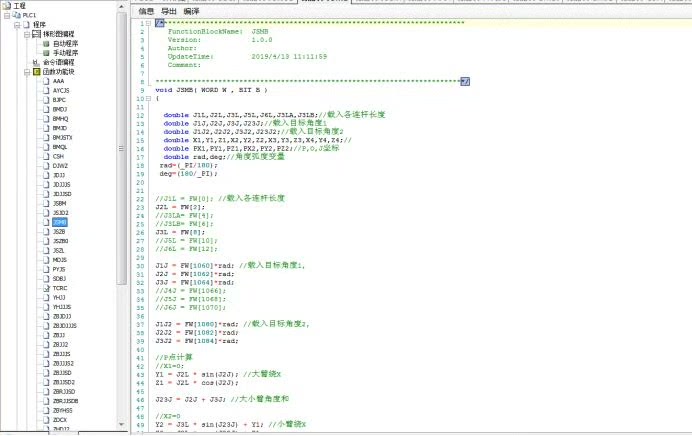
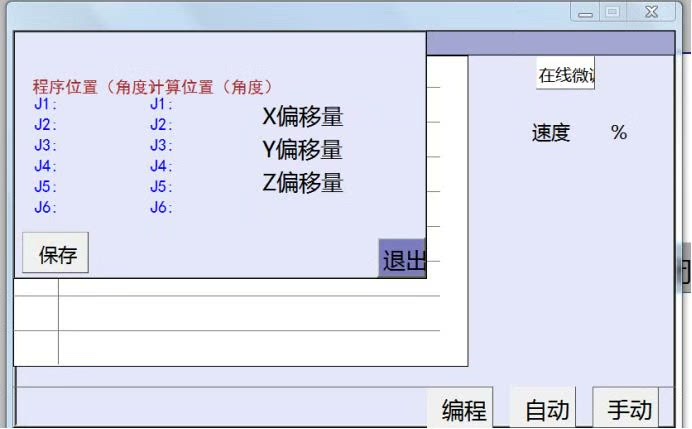
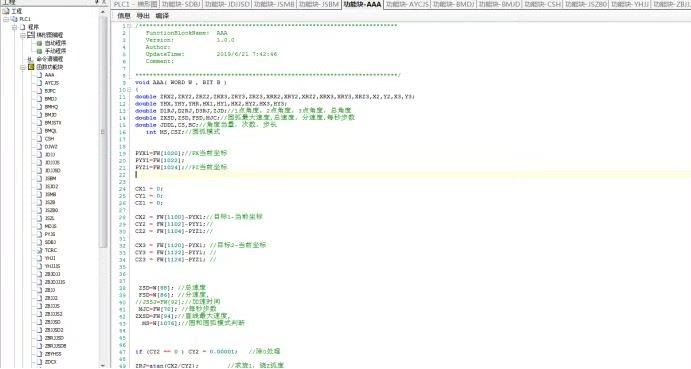
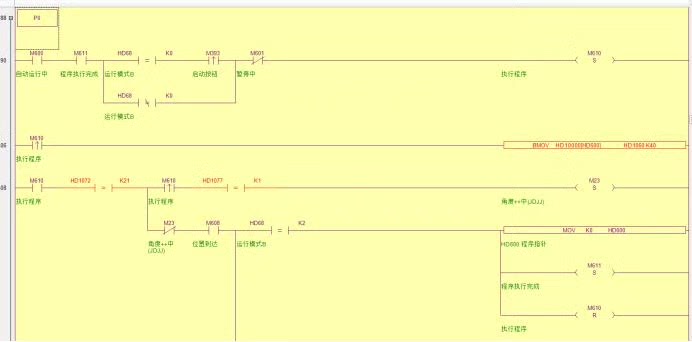
PLC的六轴机器人,信捷XD3的,有梯形图、有C语言,示较器 是维纶通的触摸屏 这个比较复杂,需要非常好的基础。 ID:1615731894157979 工控资料库 标题:基于信捷XD3 PLC的六轴机器人控制系统设计及其应用分析 摘要:本文以信捷XD3 PLC为核心,设计了一个基于六轴机器人的控制系统,并通过梯形图和C语言示较器进行编程控制。同时,我们采用了维纶通的触摸屏作为人机交互界面。本文以实际应用为基础,从硬件架构、软件设计和实验验证三个方面对该控制系统进行了全面分析,旨在为类似应用的开发者提供参考和借鉴。 引言 随着工业自动化的不断发展,六轴机器人在工业生产中发挥着重要作用。而PLC(Programmable Logic Controller)作为一种常见的工控设备,其稳定性和可靠性得到了广泛应用。本文以信捷XD3 PLC作为控制核心,设计了一个六轴机器人控制系统,并通过维纶通触摸屏进行人机交互,本文将从硬件架构、软件设计和实验验证等方面进行详细介绍。 硬件架构设计 2.1 信捷XD3 PLC概述 信捷XD3 PLC具有高性能的处理器和丰富的输入输出接口,适用于多种工控场景。本文选择信捷XD3 PLC作为控制核心,通过分析其功能特点和接口配置,实现对六轴机器人的控制。 2.2 六轴机器人结构和传感器选择 六轴机器人的结构及其对应的传感器选择对控制系统的设计至关重要。本文对六轴机器人的结构进行了详细介绍,并根据应用需求选择了合适的传感器,如力传感器和视觉传感器等。 2.3 人机交互界面设计 本文选择了维纶通的触摸屏作为人机交互界面,通过界面设计和编程实现对六轴机器人的操作和监控。本节将对维纶通触摸屏的特点和使用方法进行介绍,并展示了界面设计的过程和效果。 软件设计与编程 3.1 PLC编程软件介绍 本文使用C语言示较器作为PLC编程语言,通过对示较器的介绍和使用方法,完成了对PLC的编程控制。本节将对示较器的特点和应用进行介绍,并展示了编程示例。3.2 六轴机器人的运动控制算法 六轴机器人的运动控制是控制系统设计中的核心问题。本文对六轴机器人的运动学和逆运动学进行了分析,并设计了相应的控制算法。本节将详细介绍算法的原理和实现方法。 实验验证与应用分析 4.1 实验环境和测试方法 本文搭建了实验环境,并制定了相应的测试方法,通过对六轴机器人的运动控制、力传感和图像识别等方面进行实验验证。4.2 控制系统性能分析 本文通过实验结果对设计的控制系统性能进行评估和分析,包括运动精度、力控性能和实时性等方面。同时,对控制系统可能存在的问题进行了分析,并提出了改进措施。 结论 本文以信捷XD3 PLC为核心,设计了一个基于六轴机器人的控制系统。通过对硬件架构、软件设计和实验验证的详细介绍,展示了该控制系统的可行性和可靠性。本文对于类似应用的开发者具有一定的参考价值,并且对于提升六轴机器人控制系统的性能和稳定性有一定的指导意义。参考文献(不包含在文章中): [1] 陈XX. 《PLC控制技术及应用》. XX出版社,2008. [2] 张XX. 《机器人运动控制技术与应用》. XX出版社,2015. [3] XX公司官方网站,https://www.xxxx.com/ 【相关代码,程序地址】:http://fansik.cn/731894157979.html |


【本文地址】
今日新闻 |
推荐新闻 |