simulink仿真pid控制伺服系统 |
您所在的位置:网站首页 › 伺服电机pid控制原理图 › simulink仿真pid控制伺服系统 |
simulink仿真pid控制伺服系统
|
一、模型搭建
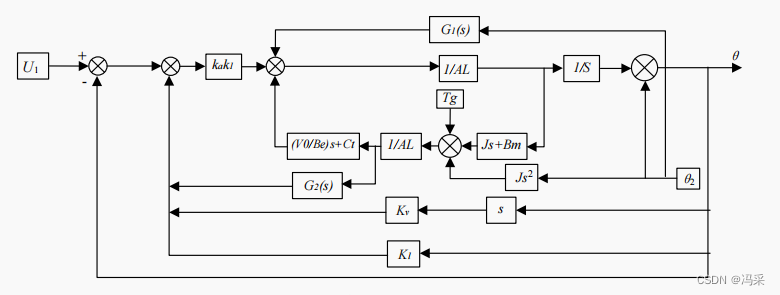
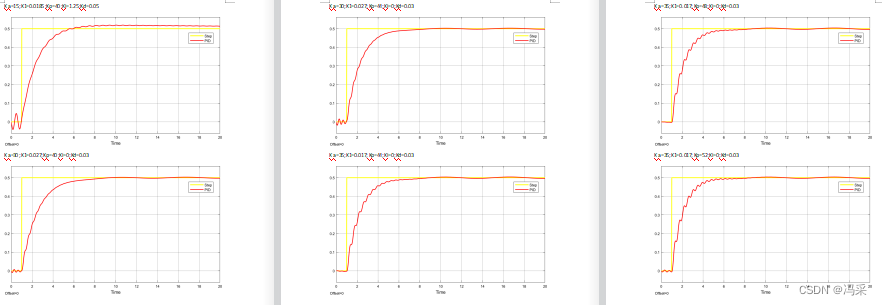
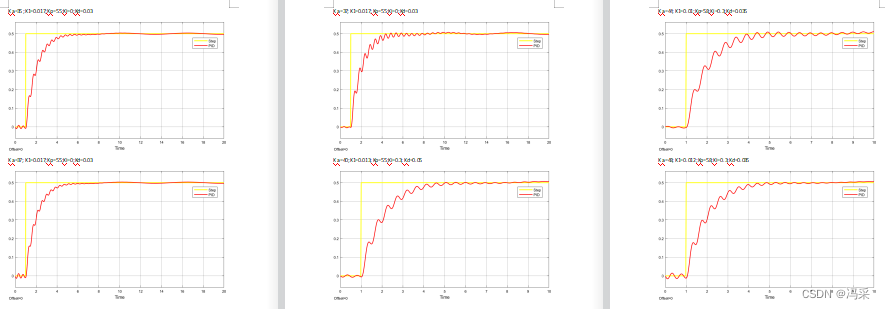
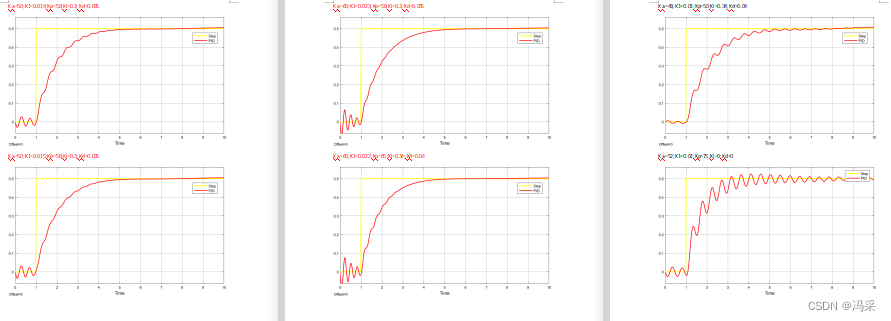
用simulink仿真建模无非就是在明确系统传递函数(或状态空间函数)或系统框图的情况下,通过可视化的图形模块将模型搭建出来。 笔者仿真的对象是一个非线性的较为复杂的伺服系统。很难用传递函数将其表达出来(也许可通过系统辨识表达),所以采用搭建系统框图的方式仿真,系统框图如下。 在工业过程控制中,按被控对象的实时数据采集的信息与给定值比较产生的误差的比例、积分和微分进行控制的控制系统,简称PID(Proportional Integral Derivative)控制系统。PID控制具有原理简单,鲁棒性强和实用面广等优点,是一种技术成熟、应用最为广泛的控制系统。而pid的参数整定则是一门艺术,她不仅需要理论知识的帮助还需要经验的辅佐再加上一些观察和推断。 比例§控制能迅速反应误差,从而减小稳态误差。但是,比例控制不能消除稳态误差。比例放大系数的加大.会引起系统的不稳定。积分(I)控制的作用是:只要系统有误差存在,积分控制器就不断地积累,输出控制量,以消除误差。因而,只要有足够的时间,积分控制将能完全消除误差,使系统误差为零,从而消除稳态误差。积分作用太强会使系统超调加大,甚至使系统出现振荡。微分(D)控制可以减小超调量,克服振荡,使系统的稳定性提高,同时加快系统的动态响应速度.减小调整时间,从而改善系统的动态性能。 PID的三个参数要综合考虑,一般先将 I、D 设为0,调好 P,达到基本的响应速度和误差,再加上 I,使误差为0,这时再加入 D,三个参数要反复 调试,最终达到较好的结果。不同的控制对象,调试的难度相差很大。 在调试和参数整定的过程中,也许你会遇到代数环的报错和积分器的报错。有一些是因为参数设置不当导致,而有一些是因为系统本身不够精简或模型搭建错误。这就需要你仔细辨别分析。 下面是我的参数整定过程,由于系统的原因,我要整定的参数除了kpkikd之外还有两个外部参数,所以整个过程还是很漫长的。 由于图像横坐标最开始的时间是200秒,并在整定的过程中慢慢将结横坐标时间变为10秒,所以小图看着阶跃响应好像效果并不明显,实际上效果还是不错的。 在参数整定完毕后点击运行,再双击示波器就会显示结果,如下图所示。 |
 将simulink中恰当的模块拖拽出,并用鼠标进行连线,即可得到如下所示的系统模型。
将simulink中恰当的模块拖拽出,并用鼠标进行连线,即可得到如下所示的系统模型。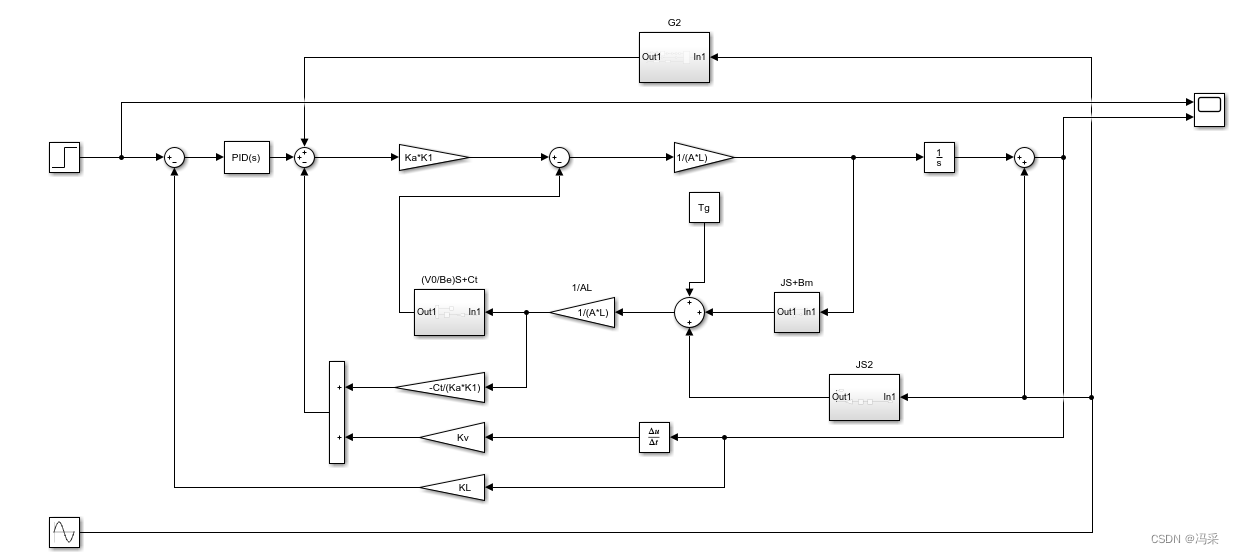 其中,G2、(V0/Be)S*Ct、JS+Bm、JS^2模块我们采用了子系统的方法将其简化,使得整体系统模型的可视性更强。 增益的相关参数的具体设置可直接写在模块上,也可用字母表示统一在m文件中赋值,在此笔者选择了后者。
其中,G2、(V0/Be)S*Ct、JS+Bm、JS^2模块我们采用了子系统的方法将其简化,使得整体系统模型的可视性更强。 增益的相关参数的具体设置可直接写在模块上,也可用字母表示统一在m文件中赋值,在此笔者选择了后者。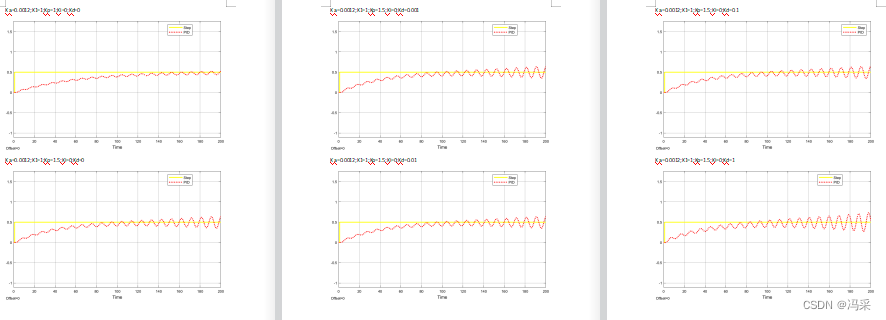
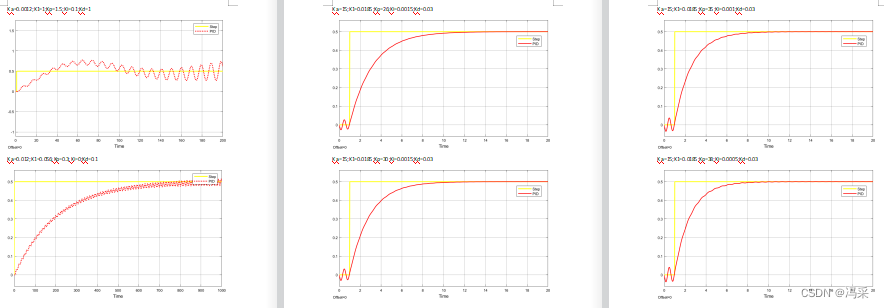
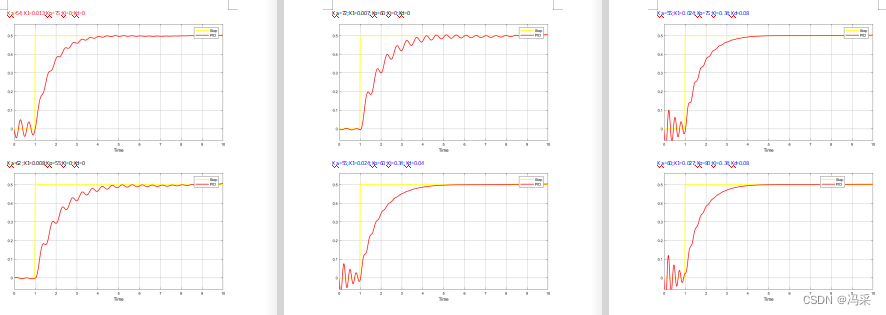
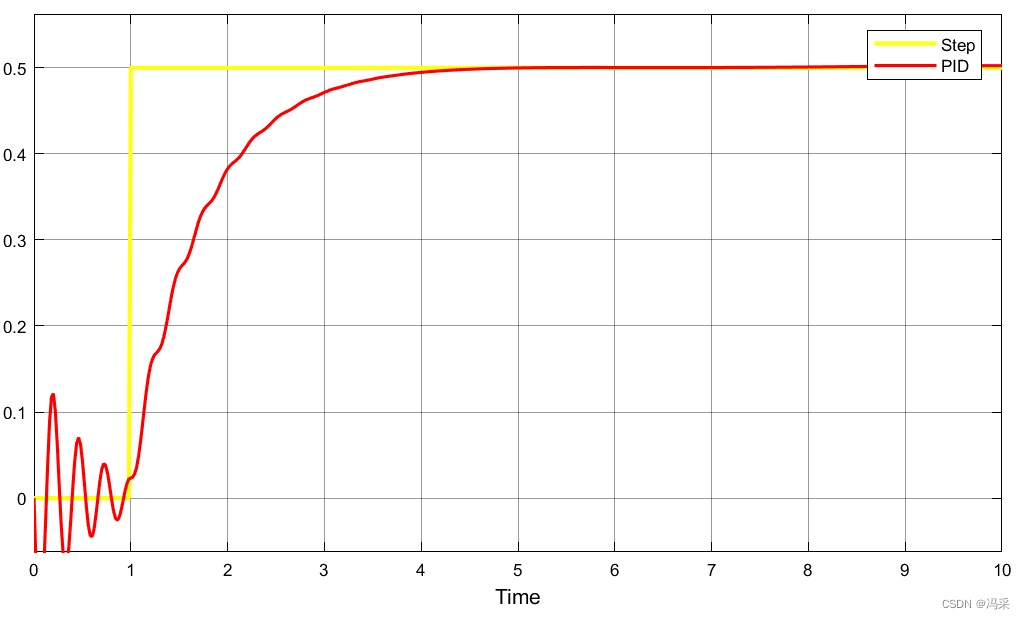 可以看出上升时间大概在2秒多一点,在4秒多一点系统达到稳态,且没有超调。在0-1秒有剧烈震荡是因为0-1秒没有阶跃输入,只有作为外界干扰的正弦波输入。 但是很遗憾pid控制的结果不符合我2-3秒达到稳态的技术指标,在我反复调整下还是不能更快,只能再换一种控制方法了。 如有朋友对仿真过程中的细节有什么问题,欢迎在评论区留言讨论。
可以看出上升时间大概在2秒多一点,在4秒多一点系统达到稳态,且没有超调。在0-1秒有剧烈震荡是因为0-1秒没有阶跃输入,只有作为外界干扰的正弦波输入。 但是很遗憾pid控制的结果不符合我2-3秒达到稳态的技术指标,在我反复调整下还是不能更快,只能再换一种控制方法了。 如有朋友对仿真过程中的细节有什么问题,欢迎在评论区留言讨论。【本文地址】
今日新闻 |
推荐新闻 |