基于PCS7的PID控制 |
您所在的位置:网站首页 › 串级控制系统应用举例讲解图表设计 › 基于PCS7的PID控制 |
基于PCS7的PID控制
|
1.PID 控制器原理
PID 控制是一种反馈控制系统,它通过比较系统的期望输 出与实际输出的误差,产生控制信号来调节系统的行为。 PID 控 制算法的控制输出可表示为: Output=Kp×er+Ki ×∫erdt+Kd× d(er) dt (1) 其中,er 为测量值与给定值之间的误差,Kp,Ki ,Kd 为比例增益,积分增益,微分增益参数。 另外一种常用表达式为: Output=Kp× (er+ 1 /Ti × ∫erdt+Td× d(er)/ dt )(2) 其中,Ti 为积分时间,Td 为微分时间。 前者多用于 PLC 或 DCS,后者多用于工业仪表控制器。两 种表达式的转换关系为:Ki = Kp /Ti ,Kd=Kp×Td
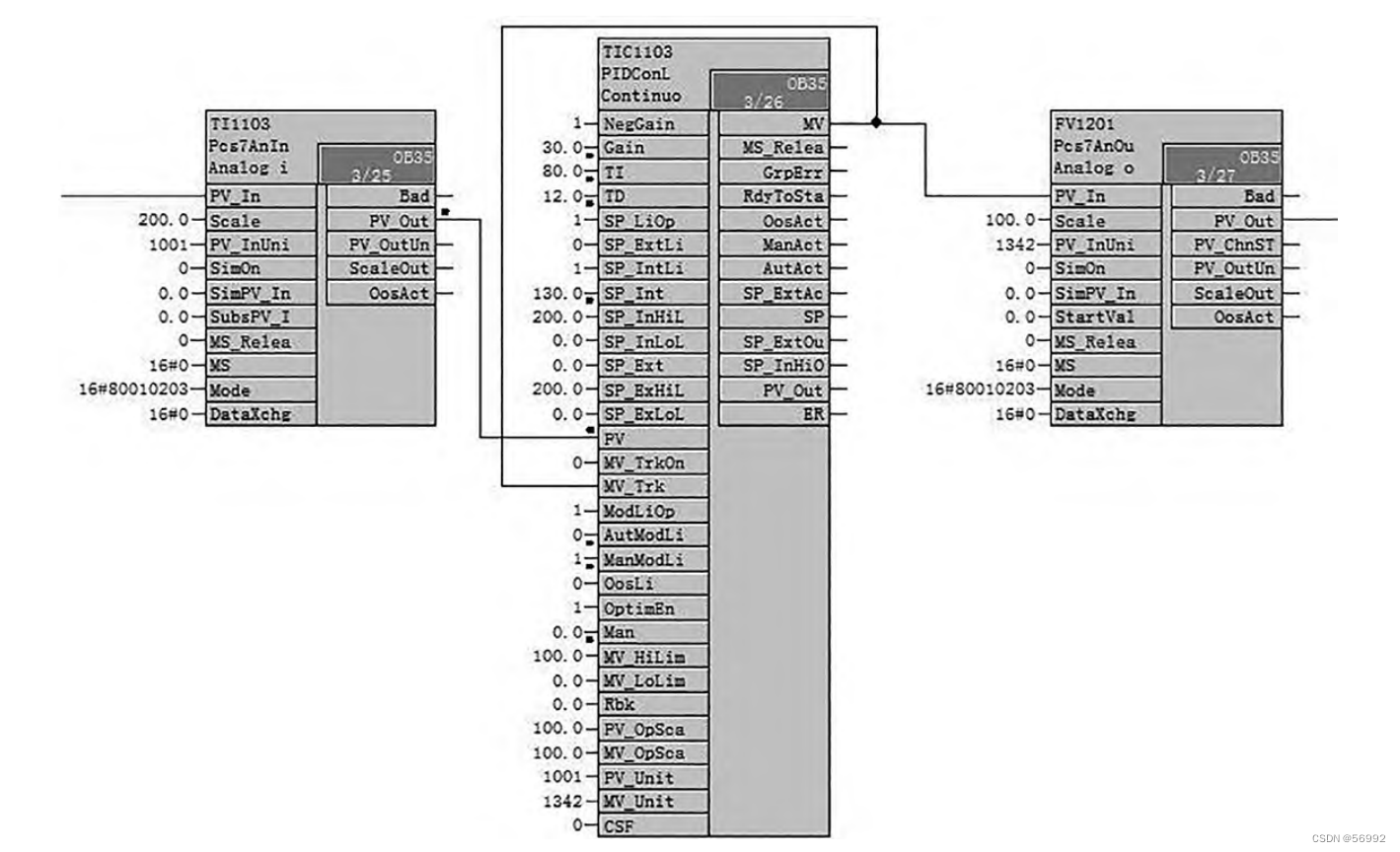
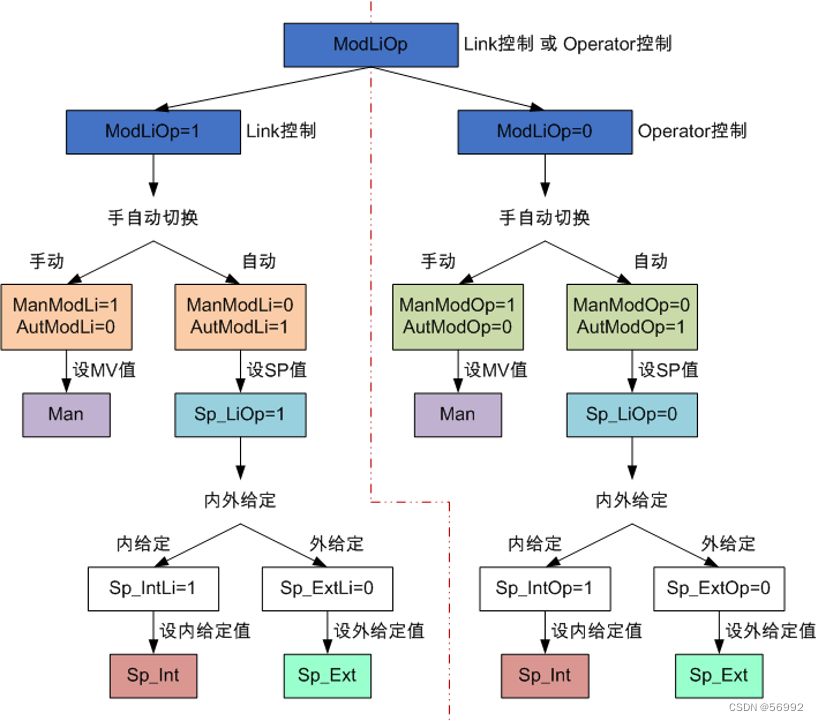
图1 温度PID控制回路 2.PID 整定方法PID 参数整定就是确定比例系数(Kp )、积分系数(Ki )和微分系数(Kd )的过程,以便使 PID 控制器能够在系统中实现稳定、快速、准确的响应。 常见的 PID 参数整定方法有: (1)经验整定法是一种常见的 PID 整定方法,通过逐步改变 PID 控制器的参数,观察系统响应并调整参数值,以获得满意的 控制效果。该方法不依赖于系统的数学模型,而是根据经验知识 进行调整。 (2)自整定法通过系统的数学模型和实时反馈来自动整定PID参 数。自整定算法通常根据系统的稳态和动态响应特性进行参数优化。 图2 基于PCS7的PID控制流程 2.1经验整定法 2.1.1 方法步骤(1)将 Ki 和 Kd 设为 0。 (2)逐渐增加 Kp,直到系统开始出现振荡。逐渐减小Kp,直至系统振荡消失。记录此时的比例系数,设定 PID 的比例系数 Kp 为当前值的 60%~70%。 (3)逐渐减小 Ti ,直至系统出现振荡,然后再反过来,逐渐增大 Ti ,直至系统振荡消失。记录此时的 Ti,设定 PID 的积分时间 Ki 为当前值的 150%~180%。 (4)除温度调节外,其他调节变量不需要设置 Td。如果需要, 逐渐增加 Td,直到系统开始出现振荡。逐渐减小 Td,直至系统振荡消失。记录此时的 Td,设定 PID 的微分时间 Td 为当前值的 30%。 (5)最后,微调 Kp 和 Td,直到满足性能要求。 经验整定法适用于一些简单的系统和应用,对非线性和时变性系统则比较难整定,需要进行多次试验和观察,和一定的时间和耐心。
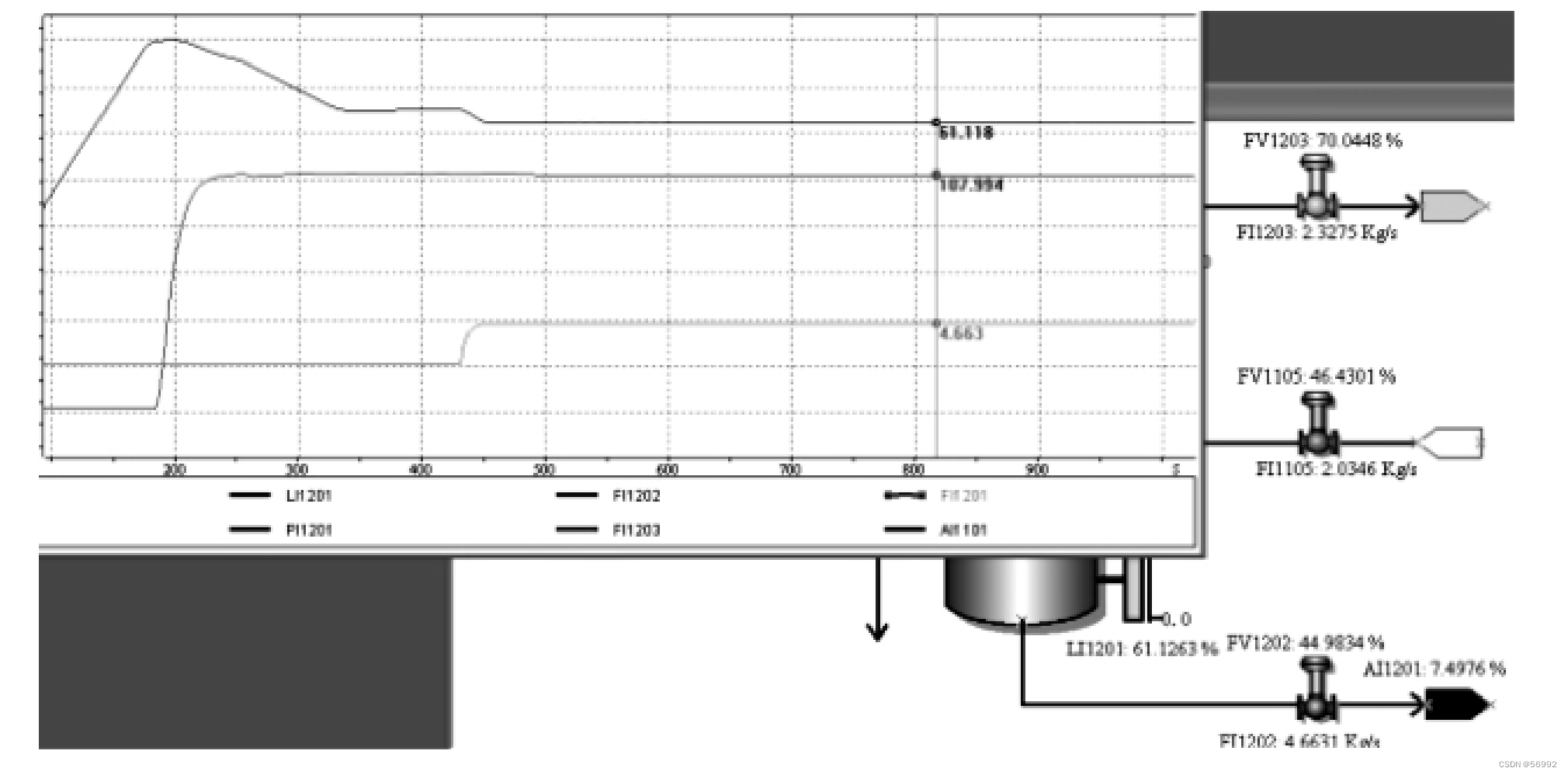
图3 蒸发器液位、温度、混合液流量趋势曲线和混合液组分显示 3.控制理论的发展 3.1 不确定系统(1)鲁棒 PID 设计:使用鲁棒控制理论和方法,设计具有强 鲁棒性的 P I D 控制器,以应对模型不确定性和参数变化。 (2)自适应 PID 控制:采用自适应控制算法,能够根据实时 系统响应进行参数调整,以适应系统模型的变化。 4.结论通过比较分析,可以得出以下结论: 经验整定法是一种简单易用的方法,适用于一些简单的 系统和应用。然而,它对系统的非线性和时变性的适应性有限, 可能无法满足较高精度和稳定性的要求。通过比较分析不同 PID 整定方法的性能,可以根据实际应用需求和系统特性选择最合适的方法。在某些情况下,可能需要结合多种方法或采用高级整定方法,以获得更好的控制性能。 |
【本文地址】
今日新闻 |
推荐新闻 |