|
文章目录
1 引言2 飞行动力学模型2.1 牛顿动力学-质心动力学2.1.1 弹体坐标系下质心动力学2.1.2 弹道坐标系下质心动力学2.1.3 地面发射坐标系下质心动力学
2.2 欧拉动力学-姿态动力学2.3 导航方程-质心运动学2.4 四元数方程-姿态运动学2.5 扁平地球模型飞行器弹体系下六自由度运动方程2.5.1 其他方程2.5.2 弹体系下六自由度运动方程
3 导弹制导系统3.1 制导系统分类3.2 寻的制导导引律3.2.1 比例导引3.2.2 攻击角度控制制导律3.2.3 攻击时间攻击角度控制制导律
4 自动驾驶仪4.1 STT/BTT控制4.2 气动舵机控制4.3 推力矢量/气动力复合控制4.4 直接力/气动力复合控制
5 SixDof Simulation5.1 AGM88E(空地导弹仿真)5.2 AIM9X(空空导弹仿真)5.3 PAC3(地空导弹仿真)
6 参考文献
1 引言
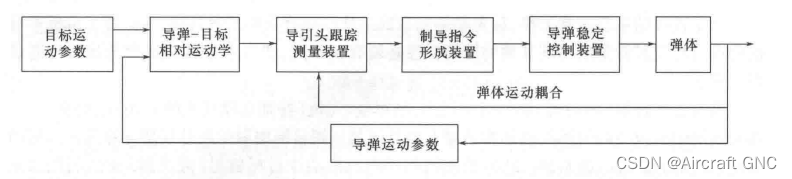
轴对称正常式气动布局导弹外形图 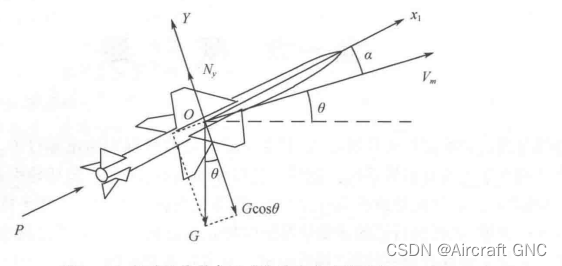 轴对称鸭式气动布局导弹外形图 轴对称鸭式气动布局导弹外形图 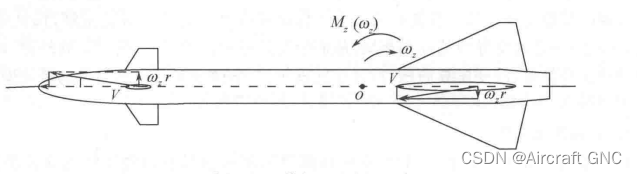 导弹制导控制系统框图 导弹制导控制系统框图 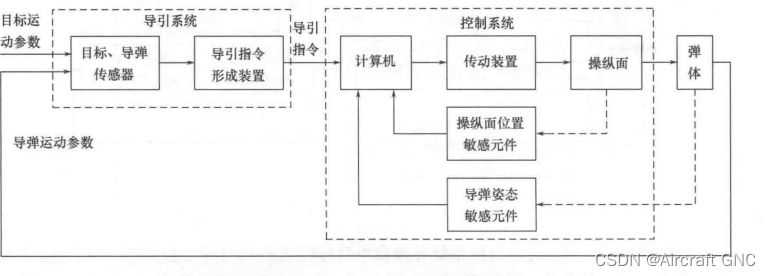
2 飞行动力学模型
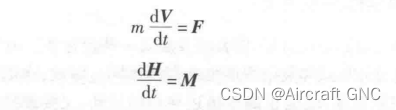
导弹飞行动力学实质上是一组非线性变系数微分方程组,可分解为如下几个部分。
2.1 牛顿动力学-质心动力学
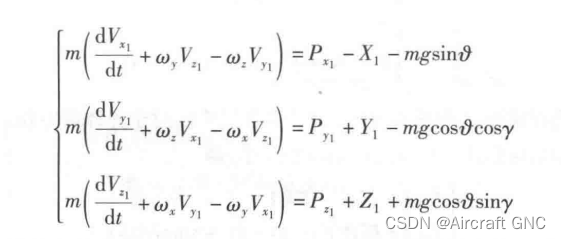
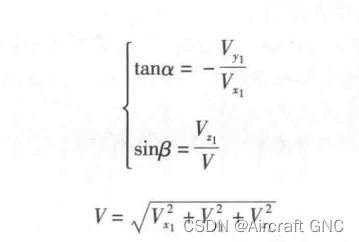
2.1.1 弹体坐标系下质心动力学
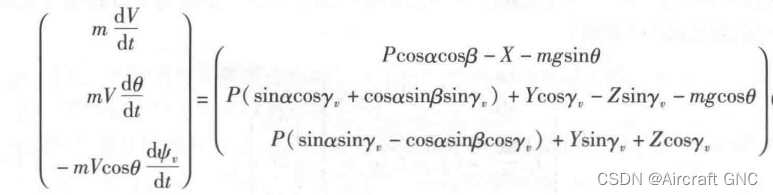
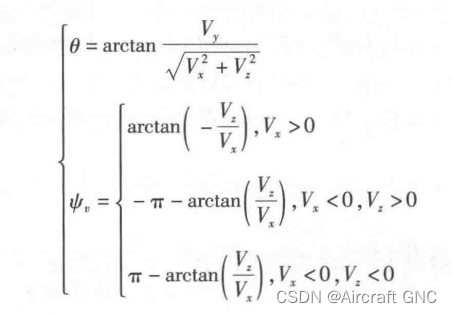
2.1.2 弹道坐标系下质心动力学
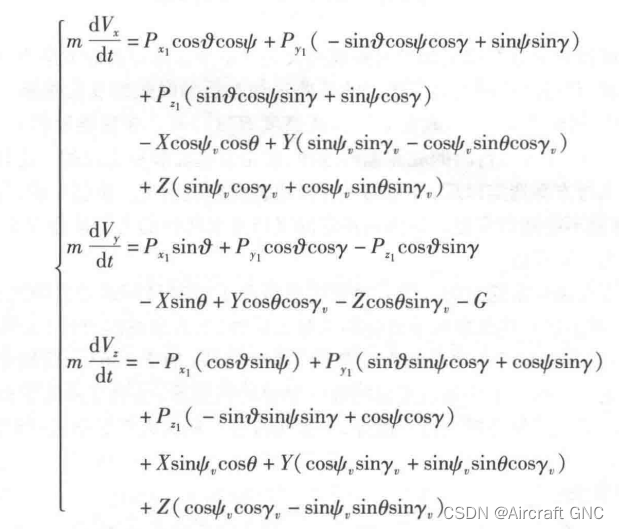
2.1.3 地面发射坐标系下质心动力学
2.2 欧拉动力学-姿态动力学
姿态动力学一般在弹体系下投影: 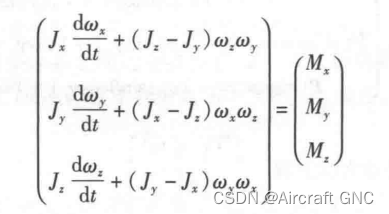
2.3 导航方程-质心运动学
地面发射系下导航方程: 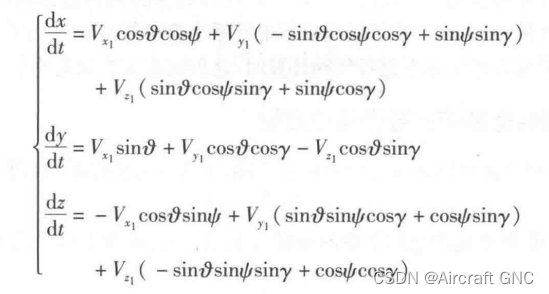
2.4 四元数方程-姿态运动学
弹体系相对于发射系四元数导数: 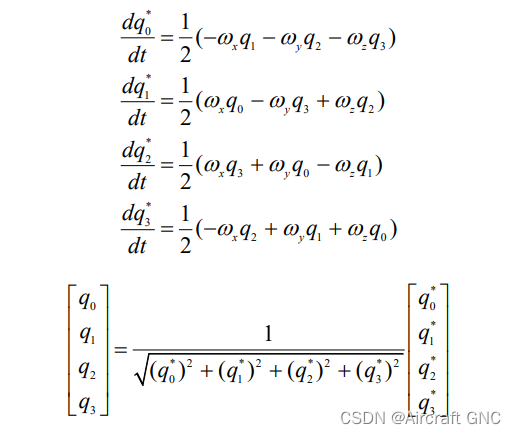
2.5 扁平地球模型飞行器弹体系下六自由度运动方程
2.5.1 其他方程
2.5.2 弹体系下六自由度运动方程
// 非线性变系数微分方程组--------------------------------------------------------------------------
// 牛顿动力学->质心动力学(机体系下线速度导数)
double Vx_body_dot = wz_body * Vy_body - wy_body * Vz_body + (Xbar + thrust) / mass - 2.0 * (q1 * q2 + q0 * q3) * g;
double Vy_body_dot = wx_body * Vz_body - wz_body * Vx_body + Ybar / mass - (q0 * q0 - q1 * q1 + q2 * q2 - q3 * q3) * g;
double Vz_body_dot = wy_body * Vx_body - wx_body * Vy_body + Zbar / mass - 2.0 * (q2 * q3 - q0 * q1) * g;
// 欧拉动力学->姿态动力学(机体系下角速度导数)
double wx_body_dot = (Mxbar - (Jz - Jy) * wy_body * wz_body) / Jx;
double wy_body_dot = (Mybar - (Jx - Jz) * wz_body * wx_body) / Jy;
double wz_body_dot = (Mzbar - (Jy - Jx) * wx_body * wy_body) / Jz;
// 导航方程->质心运动学(地面系下位置导数)
double x_nue_dot = Vx_nue;
double y_nue_dot = Vy_nue;
double z_nue_dot = Vz_nue;
// 四元数方程->姿态运动学(机体系相对于地面系四元数导数)
double q0_dot = 0.5 * (-wx_body * q1 - wy_body * q2 - wz_body * q3);
double q1_dot = 0.5 * (wx_body * q0 + wz_body * q2 - wy_body * q3);
double q2_dot = 0.5 * (wy_body * q0 - wz_body * q1 + wx_body * q3);
double q3_dot = 0.5 * (wz_body * q0 + wy_body * q1 - wx_body * q2);
3 导弹制导系统
3.1 制导系统分类
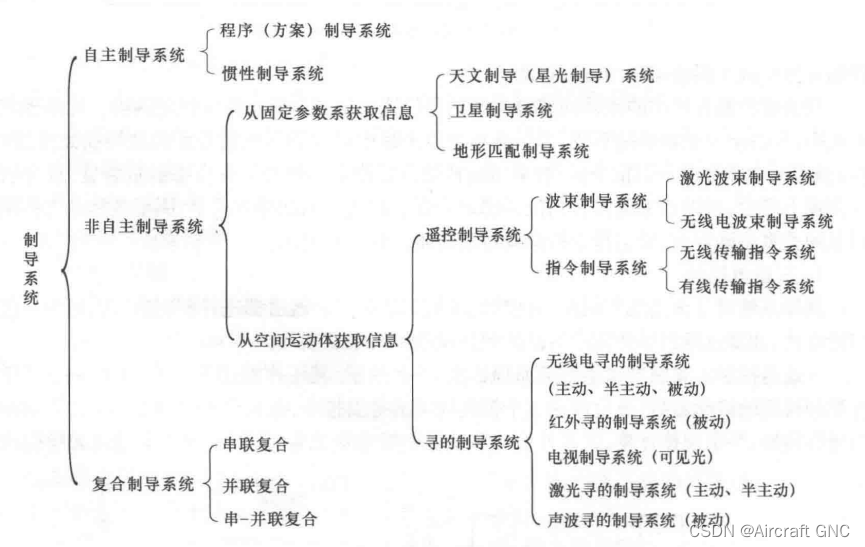 在这里只讨论寻的制导系统中的导引律 在这里只讨论寻的制导系统中的导引律
3.2 寻的制导导引律
 寻的制导导引律可参考该篇:Impact Time and Angle Control Guidance with Field-of-View Constraint 寻的制导导引律可参考该篇:Impact Time and Angle Control Guidance with Field-of-View Constraint
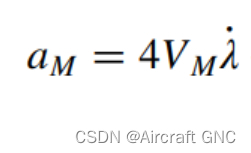
3.2.1 比例导引
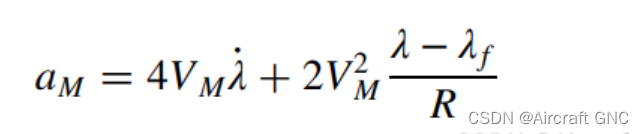
3.2.2 攻击角度控制制导律
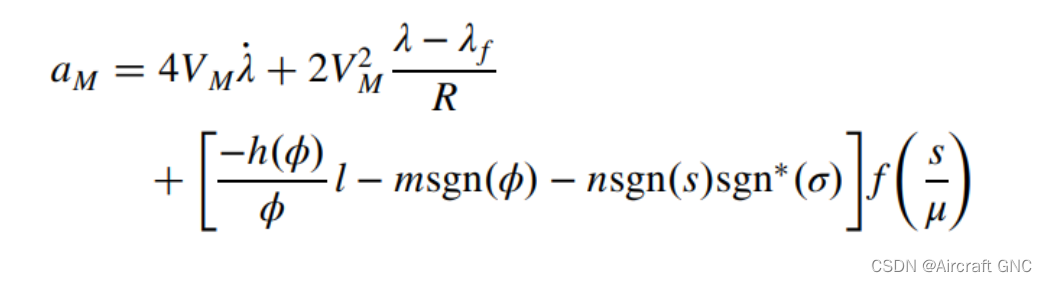
3.2.3 攻击时间攻击角度控制制导律
4 自动驾驶仪
4.1 STT/BTT控制
BTT自动驾驶仪可参考该篇:BTT控制系统六自由度仿真
4.2 气动舵机控制
STT自动驾驶仪可参考该篇:战术导弹飞行控制系统设计 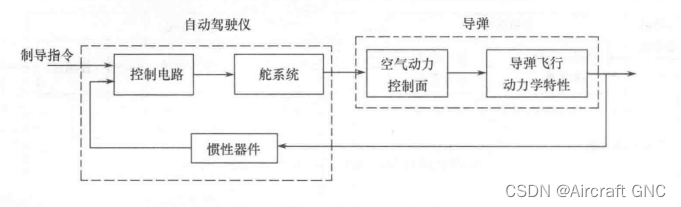 正常式气动布局尾舵控制中升降舵/方向舵方向定义 正常式气动布局尾舵控制中升降舵/方向舵方向定义 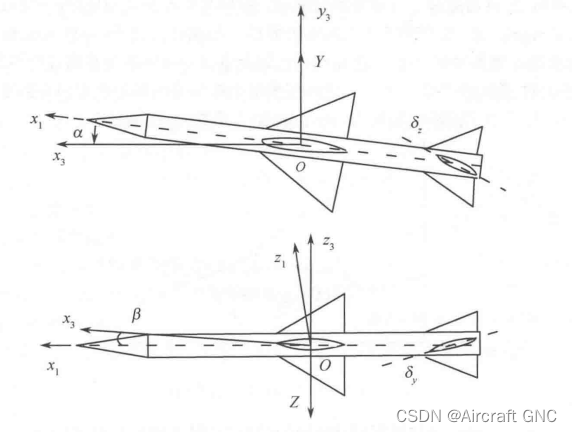 正常式气动布局尾舵控制中升降舵控制力与力矩的产生 正常式气动布局尾舵控制中升降舵控制力与力矩的产生 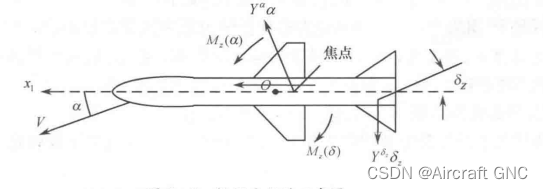
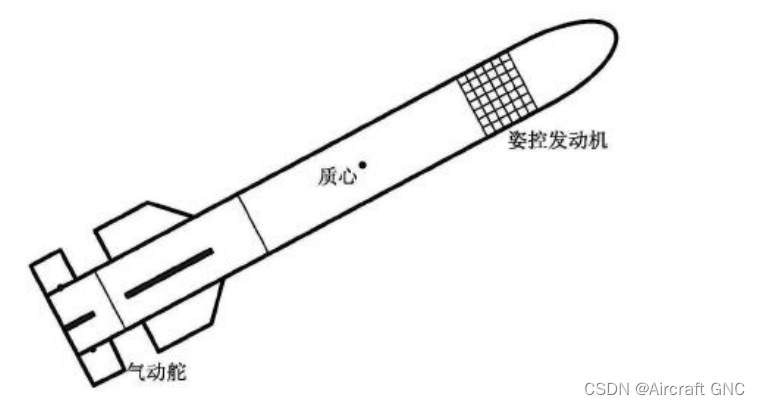
4.3 推力矢量/气动力复合控制
推力矢量控制可参考该篇:运载火箭飞行控制系统设计
4.4 直接力/气动力复合控制
5 SixDof Simulation
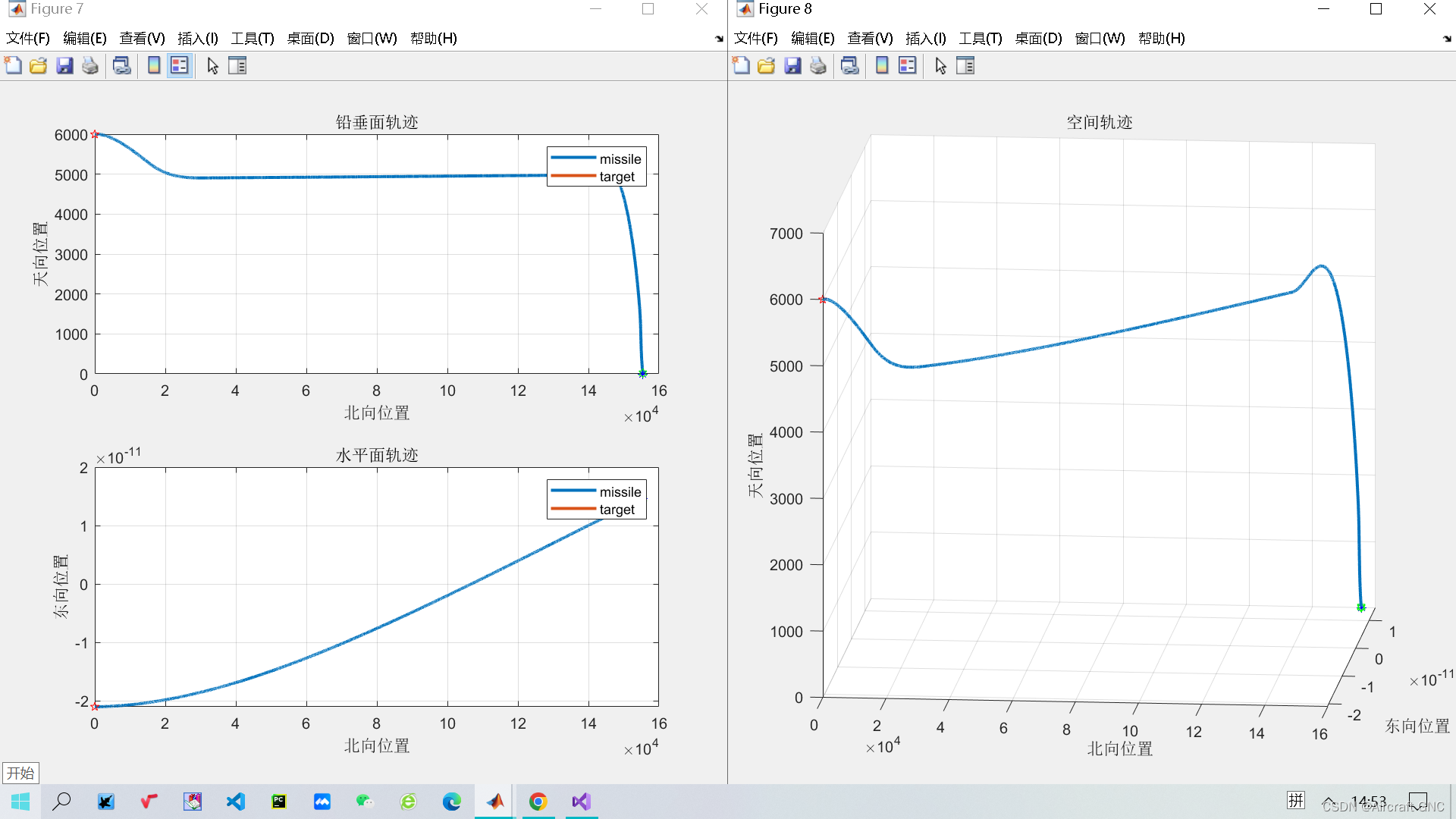
5.1 AGM88E(空地导弹仿真)
反辐射(反雷达)空地导弹(中制导巡航) 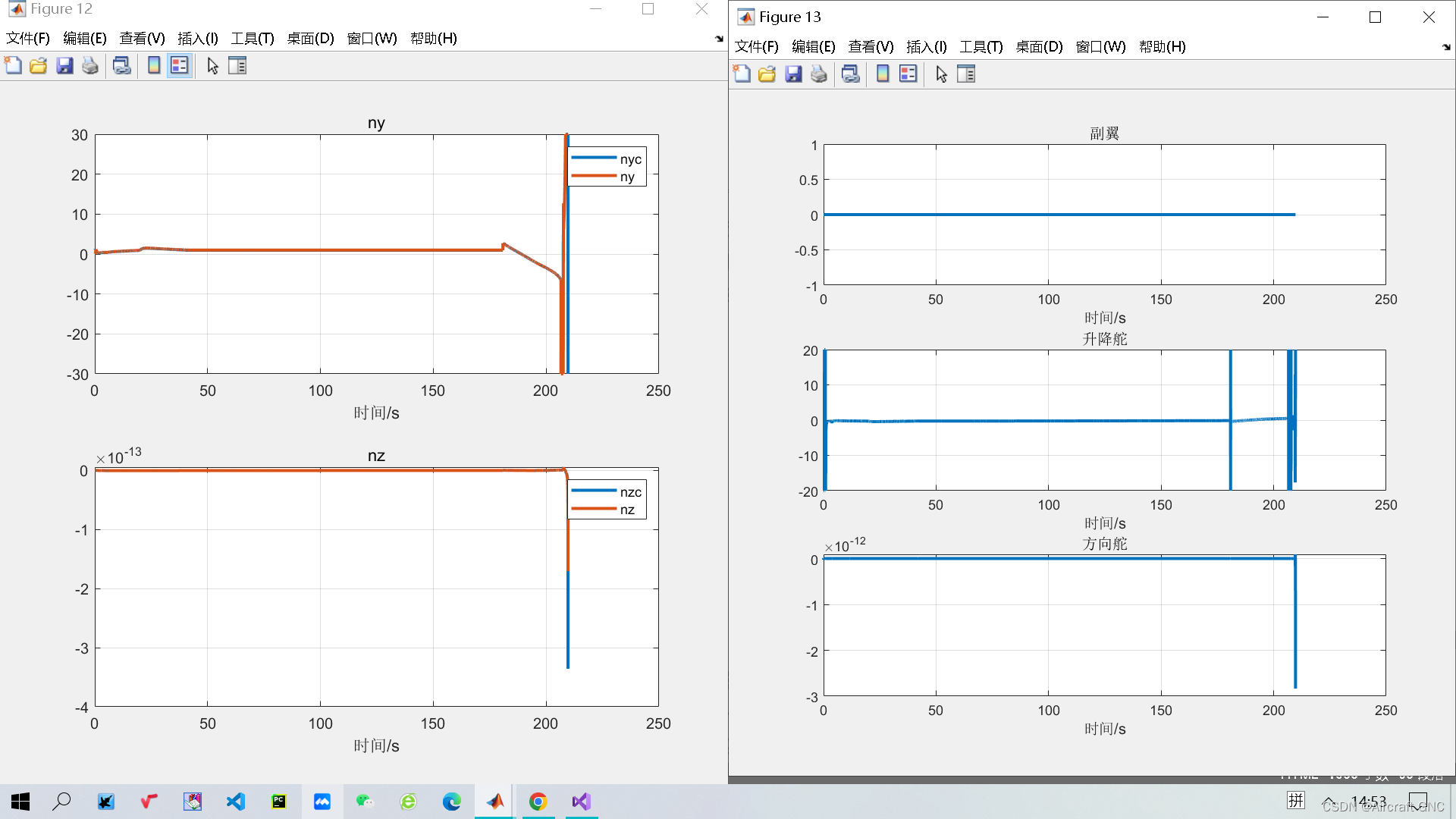
5.2 AIM9X(空空导弹仿真)
推力矢量控制效果 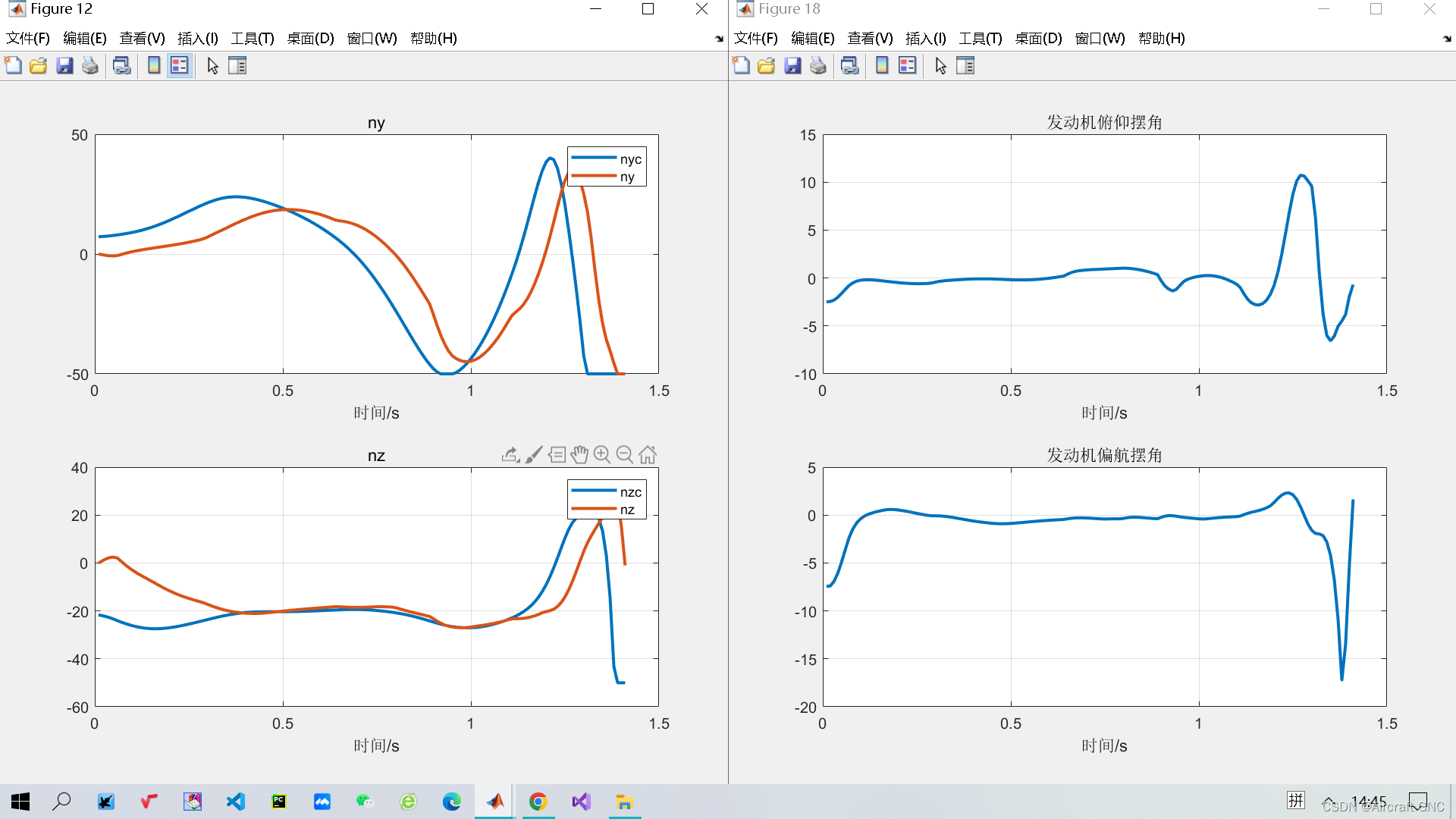 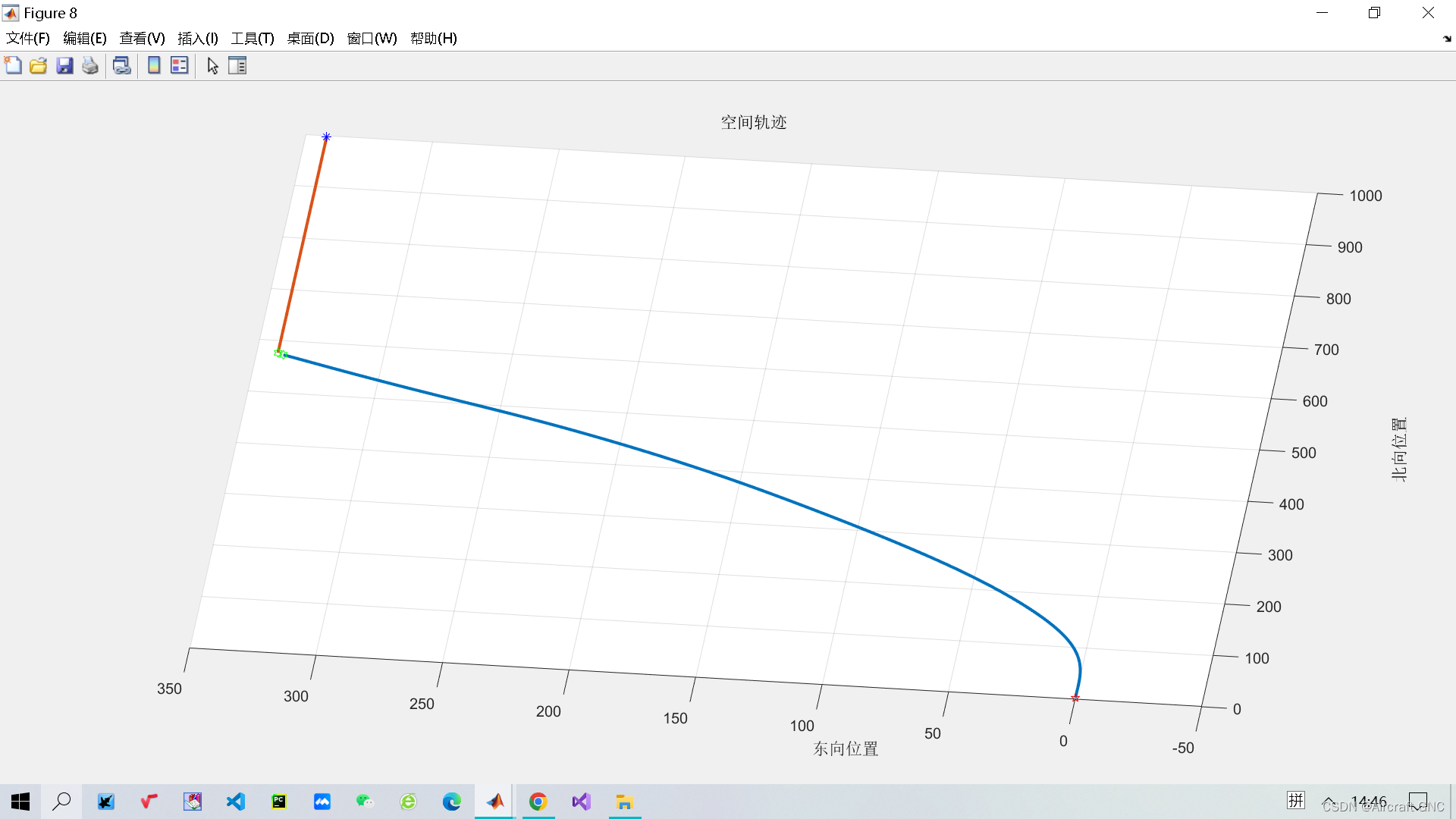 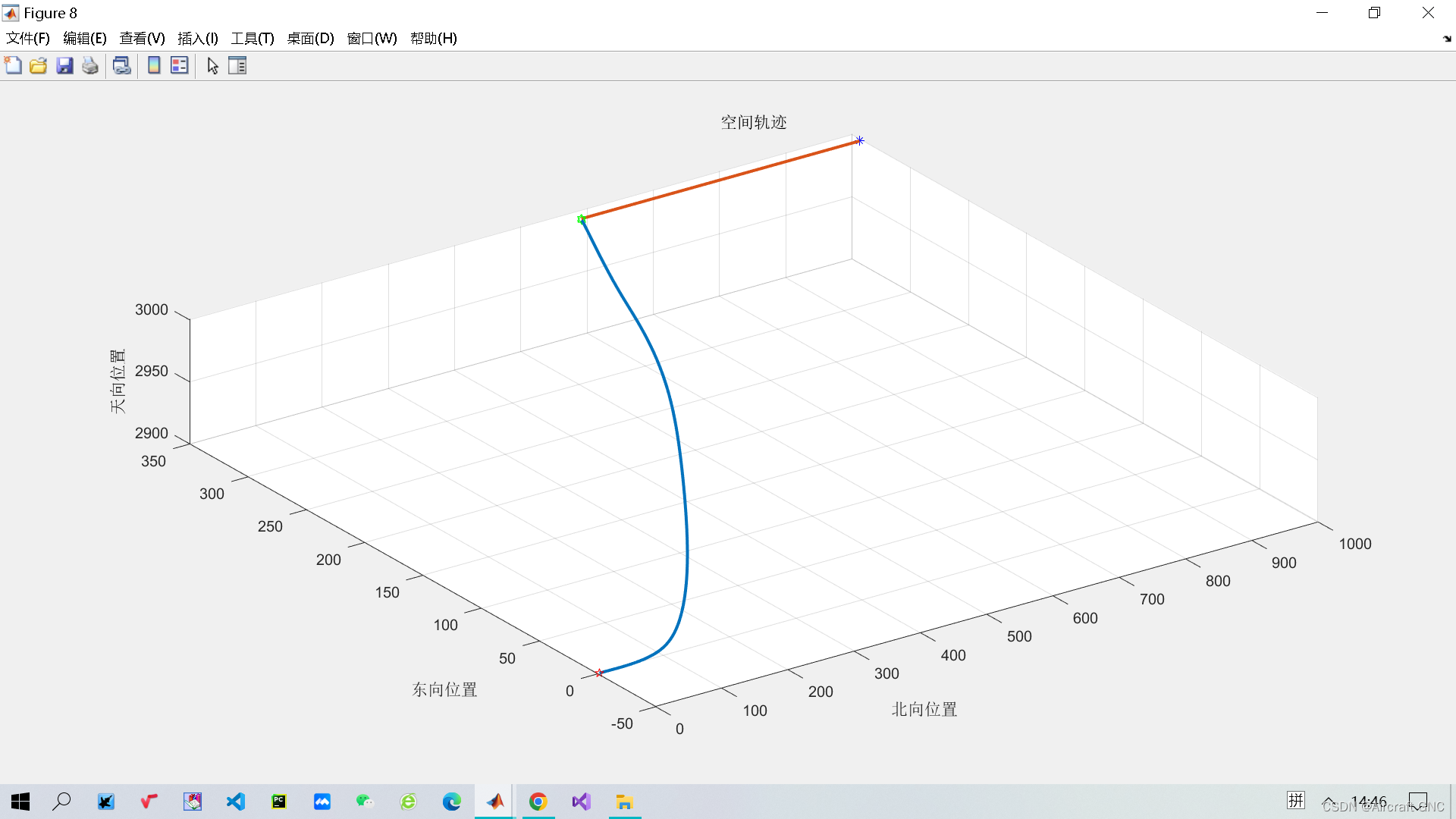
5.3 PAC3(地空导弹仿真)
反作用喷气控制效果 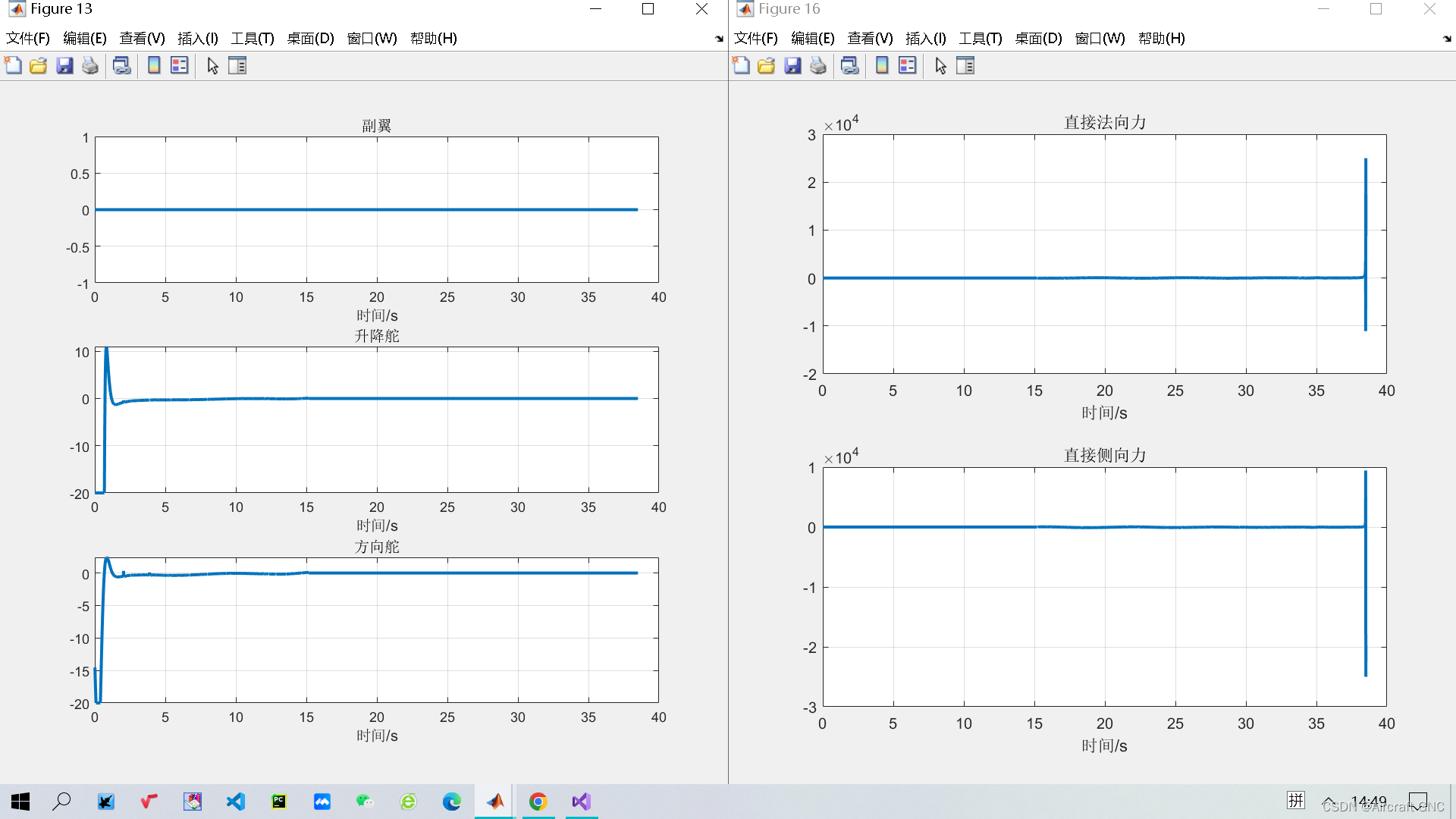 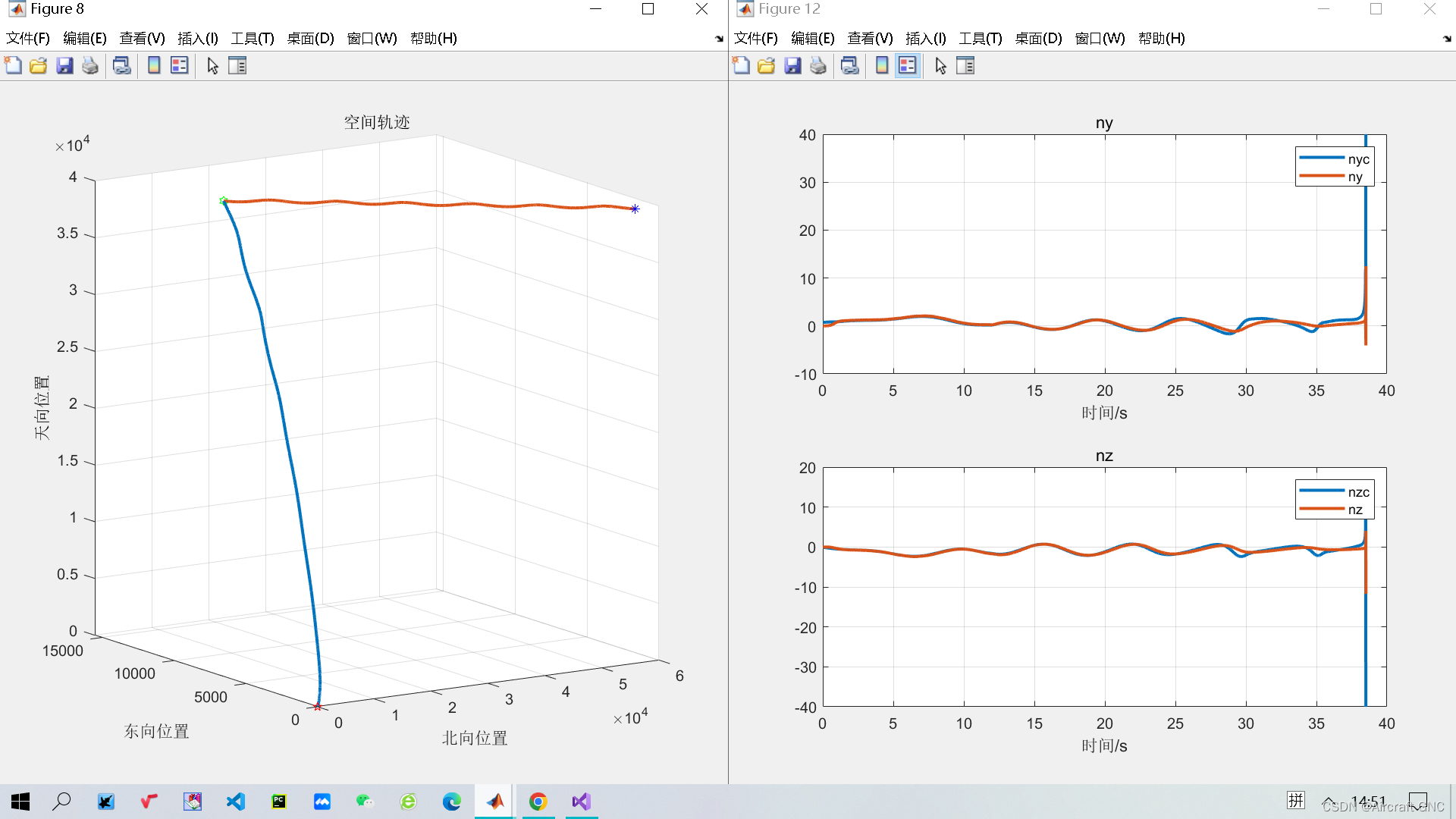
6 参考文献
|