二相混合式步进电机闭环矢量控制simulink仿真(含仿真文件) |
您所在的位置:网站首页 › 三相步进电机结构图 › 二相混合式步进电机闭环矢量控制simulink仿真(含仿真文件) |
二相混合式步进电机闭环矢量控制simulink仿真(含仿真文件)
|
目录 在位置跟踪伺服系统中二相混合式步进电机闭环矢量控制simulink仿真 闭环矢量控制系统simulink图 闭环矢量控制系统系统结构框图 二相混合式步进电机的数学模型 矩角特性 电压方程 机械运动方程 两相混合式步进电机在 dq 坐标系下数学模型 定子两相绕组电流由静止坐标系下变换到旋转坐标系下有: 定子两相绕组电流由旋转坐标系下到静止坐标系下的变换 两相混合式步进电机在 dq 坐标系中的电磁转矩表达式 在simulink中的体现 两相 SVPWM 的参数推导 在simulink中的体现 两相 SVPWM 的参数推导 电流环PI、速度环PI、位置P控制器 在simulink中的体现 PI控制 PI模型 位置环控制器设计 PID参数计算 二相混合式步进电机线性化和系统其他部分传递函数 简化和假定 电流环部分传递函数 速度环部分传递函数 位置环部分传递函数 PID参数计算方法 计算电流环PI 计算速度环PI 计算位置环P 仿真结果 结尾 在位置跟踪伺服系统中二相混合式步进电机闭环矢量控制simulink仿真 闭环矢量控制系统simulink图 闭环矢量控制系统系统结构框图
闭环矢量控制系统系统结构框图
 其中
R
A 和
R
B 表示定子绕组绕 组 A 和定子绕组 B 的内阻,
k
e为步进电机的反电动势系数,
其中
R
A 和
R
B 表示定子绕组绕 组 A 和定子绕组 B 的内阻,
k
e为步进电机的反电动势系数,
 详细推导参见文献【1】
两相混合式步进电机在 dq 坐标系下数学模型
定子两相绕组电流由静止坐标系下变换到旋转坐标系下有:
详细推导参见文献【1】
两相混合式步进电机在 dq 坐标系下数学模型
定子两相绕组电流由静止坐标系下变换到旋转坐标系下有:
 两相 SVPWM 的参数推导
在simulink中的体现
两相 SVPWM 的参数推导
在simulink中的体现
如图中选中部分
(为了节省时间只需要知道3-13、3-14、3-15超限定条件情况下和限定条件情况下表3.4这些结论即可) 取如下图 3.4 所示的电路拓扑结构的双 H 桥逆变器。




 经过坐标变换,可得到矢量
U
ref
的静止两相正交坐标系下分量
U
α
、
U
β
如图
3.7
所示。
经过坐标变换,可得到矢量
U
ref
的静止两相正交坐标系下分量
U
α
、
U
β
如图
3.7
所示。
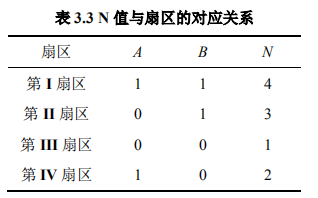
 根据基本矢量分布图即可确定参考矢量
U
ref
所在扇区:若电压参考矢量
U
ref
落在第
I
扇区,则有
U
α
> 0
,
U
β
> 0;若电压参考矢量U
ref 落在第 II
扇区,则有
U
α
< 0
,
U
β
> 0
;若
电压参考矢量
U
ref
落在第
III
扇区,则有
U
α
< 0
,
U
β
< 0
;若电压参考矢量
U
ref
落在第
IV
扇
区,则有
U
α
> 0
,
U
β
< 0
。由此可得,
U
ref
所在的扇区完全可以通过
U
α
和
U
β
的符号来判断。
为简捷的判定
U
ref
所处空间扇区的位置,参考
U
ref
在三相矢量空间扇区的位置的判定方法,
做如下假设:
根据基本矢量分布图即可确定参考矢量
U
ref
所在扇区:若电压参考矢量
U
ref
落在第
I
扇区,则有
U
α
> 0
,
U
β
> 0;若电压参考矢量U
ref 落在第 II
扇区,则有
U
α
< 0
,
U
β
> 0
;若
电压参考矢量
U
ref
落在第
III
扇区,则有
U
α
< 0
,
U
β
< 0
;若电压参考矢量
U
ref
落在第
IV
扇
区,则有
U
α
> 0
,
U
β
< 0
。由此可得,
U
ref
所在的扇区完全可以通过
U
α
和
U
β
的符号来判断。
为简捷的判定
U
ref
所处空间扇区的位置,参考
U
ref
在三相矢量空间扇区的位置的判定方法,
做如下假设:
 以
U
ref
是此时所处第
I
扇区为例,由图
3.7
所示知,则可以通过非零的相邻矢量
U
1
和
U
2
以及零矢量
U
0
在各自的作用时间内来合成
U
ref
。设
T
s
为一个
PWM
周期,
U
ref
等效作用
于非零矢量
U
1
和
U
2
上的时间分别为
t
1
和
t
2
,在零矢量
U
0
上的作用时间为
t
0。由空间电压
矢量合成的伏秒平衡特性可得:
以
U
ref
是此时所处第
I
扇区为例,由图
3.7
所示知,则可以通过非零的相邻矢量
U
1
和
U
2
以及零矢量
U
0
在各自的作用时间内来合成
U
ref
。设
T
s
为一个
PWM
周期,
U
ref
等效作用
于非零矢量
U
1
和
U
2
上的时间分别为
t
1
和
t
2
,在零矢量
U
0
上的作用时间为
t
0。由空间电压
矢量合成的伏秒平衡特性可得:
 由于载波频率很高,所以由
3-(3)
式可得
3-(4)
式:
由于载波频率很高,所以由
3-(3)
式可得
3-(4)
式:
 将式
3-(5)
代入式
3-(4)
中并简化,得式
3-(6)
:
将式
3-(5)
代入式
3-(4)
中并简化,得式
3-(6)
:
 又:
又:
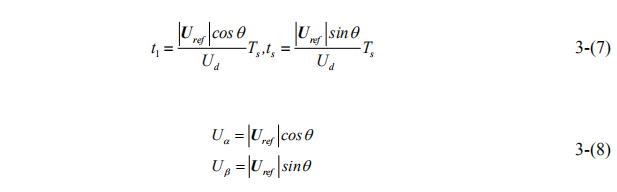 将
3-(8)
代入
3-(7)
中可以得到:
将
3-(8)
代入
3-(7)
中可以得到:
 式
3-(9)
就是以
U
ref
在第
I
扇区为例,推导出
U
ref
等效作用于
U
1
和
U
2
上的时间计算公
式,同理,可以求出
U
ref
处在其它几个扇区上时,其等效作用于相应扇区上相邻基本非零
矢量的作用时间如下:
当
U
ref
此时所处第
II
扇区时,
U
ref
等效作用于非零矢量
U
2
和
U
3
上的时间分别为
t
1
和
t
2
,则:
式
3-(9)
就是以
U
ref
在第
I
扇区为例,推导出
U
ref
等效作用于
U
1
和
U
2
上的时间计算公
式,同理,可以求出
U
ref
处在其它几个扇区上时,其等效作用于相应扇区上相邻基本非零
矢量的作用时间如下:
当
U
ref
此时所处第
II
扇区时,
U
ref
等效作用于非零矢量
U
2
和
U
3
上的时间分别为
t
1
和
t
2
,则:
当 Uref此时所处第 III 扇区时,Uref等效作用于非零矢量 U3 和 U4 上的时间分别为 t1 和 t 2 ,则: 当
U
ref
此时所处第
IV
扇区时,
U
ref
等效作用于非零矢量
U
4
和
U
1
上的时间分别为
t
1
和
t
2
,则:
当
U
ref
此时所处第
IV
扇区时,
U
ref
等效作用于非零矢量
U
4
和
U
1
上的时间分别为
t
1
和
t
2
,则:
 由于电机起动瞬间和负载突然变化的瞬间,速度环输出的转矩电流
i
q
会在极短时间内
变化很大,电流环输出的空间电压矢量的幅值
V
很有可能超出双
H
桥的直流母线电压而出
现过调制现象,即空间电压矢量幅值在如图
3.7
所示的实线圆之外,所以有必要对电流环
输出的空间电压矢量加以束缚,使电流环输出的空间电压矢量限制在如图
3.7
所示中的实
线圆之内,其限定条件见
3-(13)
式。
由于电机起动瞬间和负载突然变化的瞬间,速度环输出的转矩电流
i
q
会在极短时间内
变化很大,电流环输出的空间电压矢量的幅值
V
很有可能超出双
H
桥的直流母线电压而出
现过调制现象,即空间电压矢量幅值在如图
3.7
所示的实线圆之外,所以有必要对电流环
输出的空间电压矢量加以束缚,使电流环输出的空间电压矢量限制在如图
3.7
所示中的实
线圆之内,其限定条件见
3-(13)
式。
 当超出限定条件时,新的给定电压矢量为:
当超出限定条件时,新的给定电压矢量为:
 式 3-(14)中
式 3-(14)中
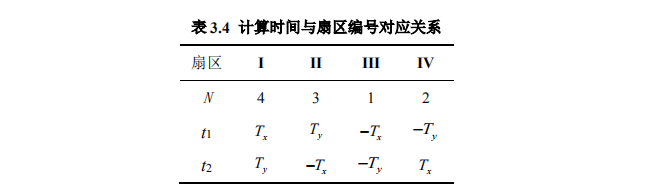
 现在令
现在令
 、
、
 ,可得到 U
ref
在不同扇区下等效作用于相邻基础电压矢
量的时间
t
1
和
t
2
关系如表
3.4
所示。
,可得到 U
ref
在不同扇区下等效作用于相邻基础电压矢
量的时间
t
1
和
t
2
关系如表
3.4
所示。
 为此,本文采用五段式的
SVPWM
来实现矢量调制,其在每个扇区的波形如图
3.8
所
示。
为此,本文采用五段式的
SVPWM
来实现矢量调制,其在每个扇区的波形如图
3.8
所
示。

 可以看到pwm波形正常
电流环PI、速度环PI、位置P控制器
在simulink中的体现
可以看到pwm波形正常
电流环PI、速度环PI、位置P控制器
在simulink中的体现
如图中选中部分
为了在将来配合模糊pid,使用自己创建的pid模型:
系统结构图如下:
由二相混合式步进电机的数学模型可知,二相混合式步进电机模型是非线性的,因此有必要进行线性化,从而得到电机传递函数进而计算皮带控制器的参数kp、ki。下面推导电机的传递函数。 二相混合式步进电机线性化和系统其他部分传递函数 简化和假定 近似永磁体磁 链在相绕组中产生的磁链随转子位置按正弦规律变化,即不考虑定子电流对它的影响,不考虑磁滞和涡流效应,只考虑气隙磁导的平均分量和基波分量,忽略二相绕组间互感。电压电流方程、电磁转矩方程和机械运动方程:
 式中,ua
、ub
及
i
a
、ib
分别为
A
、
B
两相的电压和电流; R 为绕组电阻,
L
为绕组电感;
k
e
为转矩系数;
θ
、
ω 分别为电机转动角度及转动角速度; N
r
为转子齿 数; T
e
为混合式步进电动机的电磁转矩;
J
、
B
分别为 负载转动惯量和粘滞摩擦系数。
电流环部分传递函数
实际运行中,二相混合式步进电动机旋转反电 势调节过程远大于电流调节过程,且在转速较低的 系统中,可以不考虑旋转反电势的影响。
因此,依据 方程( 1
) 和(
2
) 可得到混合式步进电动机
A
、
B
两相 电压到电流的传递函数,如式( 6
) :
式中,ua
、ub
及
i
a
、ib
分别为
A
、
B
两相的电压和电流; R 为绕组电阻,
L
为绕组电感;
k
e
为转矩系数;
θ
、
ω 分别为电机转动角度及转动角速度; N
r
为转子齿 数; T
e
为混合式步进电动机的电磁转矩;
J
、
B
分别为 负载转动惯量和粘滞摩擦系数。
电流环部分传递函数
实际运行中,二相混合式步进电动机旋转反电 势调节过程远大于电流调节过程,且在转速较低的 系统中,可以不考虑旋转反电势的影响。
因此,依据 方程( 1
) 和(
2
) 可得到混合式步进电动机
A
、
B
两相 电压到电流的传递函数,如式( 6
) :
 PID参数计算方法
计算电流环PI
PID参数计算方法
计算电流环PI
被控对象开环传递函数
令Tcp=0.0001(pwm延迟时间),Ta=0.012/0.67,k1=1/0.67,k1oc=1(电流环的反馈回路),kcp=110(pwm放大)
则PID控制器
由于电流环开环传递函数
得到
速度环:
由上一步可知电流环闭环:
于是速度环开环传递函数:
T2=0.00352/0.001,k2=ke/0.001 同理于电流环:
 位置开环传递函数:
位置开环传递函数:
 得到位置kp:
得到位置kp:
 计算完参数后给定位置阶跃信号系统反应:
计算完参数后给定位置阶跃信号系统反应:
 仿真结果
仿真结果
给定位置信号:

 放大后:
放大后:
 可以看到系统优越的跟随特性
结尾
可以看到系统优越的跟随特性
结尾
下载地址: matlab2019b版本:closed_loop_control_system_for_stepping_motor.slx_二相步进电机数学模型-嵌入式其他资源-CSDN下载 matlab2016b版本:closed_loop_control_system_for_stepping_motor2016a.slx_二相步进电机数学模型-嵌入式文档类资源-CSDN下载 文件名:closed_loop_control_system_for_stepping_motor.slx 版本:2019b 参考文献: [1] 两相混合式步进电机高 性能闭环驱动 系统研究 汪全俉 [2] 两相 SVPWM 技术在位置跟踪伺服系统中的应用 刘源晶,杨向宇,赵世伟 [3] 二相混合式步进电动机传递函数模型推导 徐文强,闫剑虹其他关于步进电机控制仿真的文章: 二相混合式步进电机开环细分控制simulink建模仿真含模型文件二相混合式步进电机开环细分控制simulink建模仿真含模型文件_Giiwedin的博客-CSDN博客_步进电机矢量控制和细分控制 二相混合式步进电机闭环矢量控制simulink仿真(含仿真文件)二相混合式步进电机闭环矢量控制simulink仿真(含仿真文件)_Giiwedin的博客-CSDN博客_步进电机 矢量控制 二相混合式步进电机simulink仿真简单的驱动器建模(含模型文件)二相混合式步进电机simulink仿真简单的驱动器建模(含模型文件)_Giiwedin的博客-CSDN博客_simulink 步进电机驱动器 相关文章: 使用simulink仿真连续(离散)线性定长系统全维渐进状态观测器_Giiwedin的博客-CSDN博客 使用drem对控制系统进行参数估计simulink仿真_Giiwedin的博客-CSDN博客 对给定干扰信号的simulink数字控制系统仿真_Giiwedin的博客-CSDN博客_simulink扰动信号 二相混合式步进电机闭环矢量控制simulink仿真(含仿真文件)_Giiwedin的博客-CSDN博客_步进电机数学模型 二相混合式步进电机开环细分控制simulink建模仿真含模型文件_Giiwedin的博客-CSDN博客
|













 =k2
=k2
【本文地址】
今日新闻 |
推荐新闻 |