西门子PLC1200 1214C DC/DC/DC 驱动步进电机 |
您所在的位置:网站首页 › 三相步进电动机接线图 › 西门子PLC1200 1214C DC/DC/DC 驱动步进电机 |
西门子PLC1200 1214C DC/DC/DC 驱动步进电机
|
前言
本篇文章为各位初学者详细介绍西门子PLC1200驱动步进电机的步骤,同样也是对自己所学的梳理。文章适合于有基础PLC编程基础和基本电路知识的同学,经查找有关于使用PLC驱动步进电机的文章甚少,描述也十分简略,使初学者学习驱动电机一项有些困难,本篇文章将进行详细的介绍。 一.硬件准备西门子PLC1200 1214C DC/DC/DC(西门子PLC1200其它类型也可以) 按钮开关(三个及以上)
42步进电机
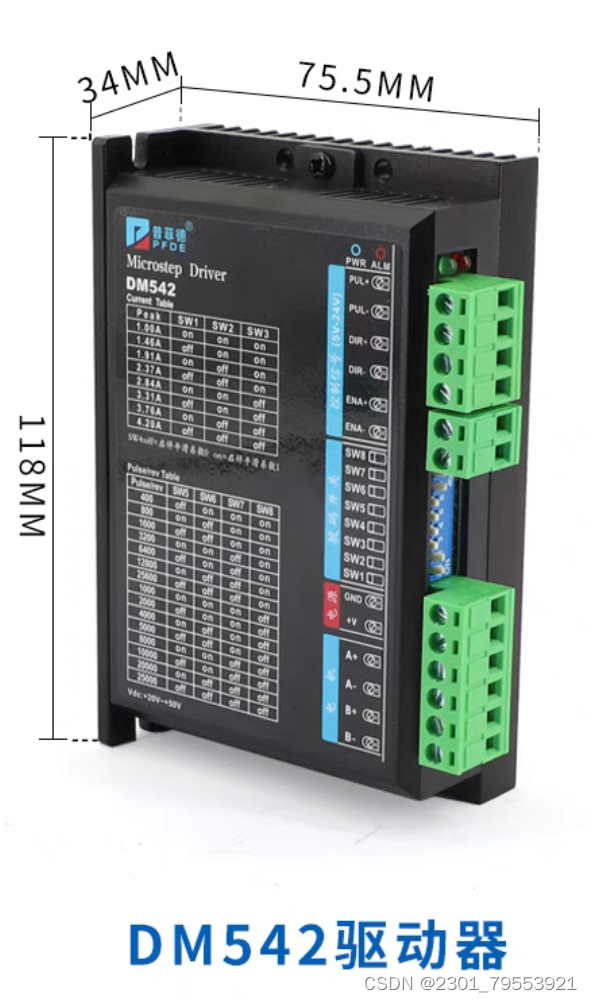
普菲德DM542驱动器
220V转24V直流电源
漏电保护开关断路器
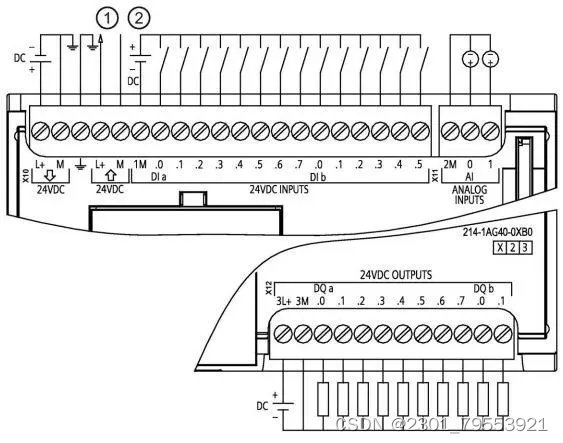
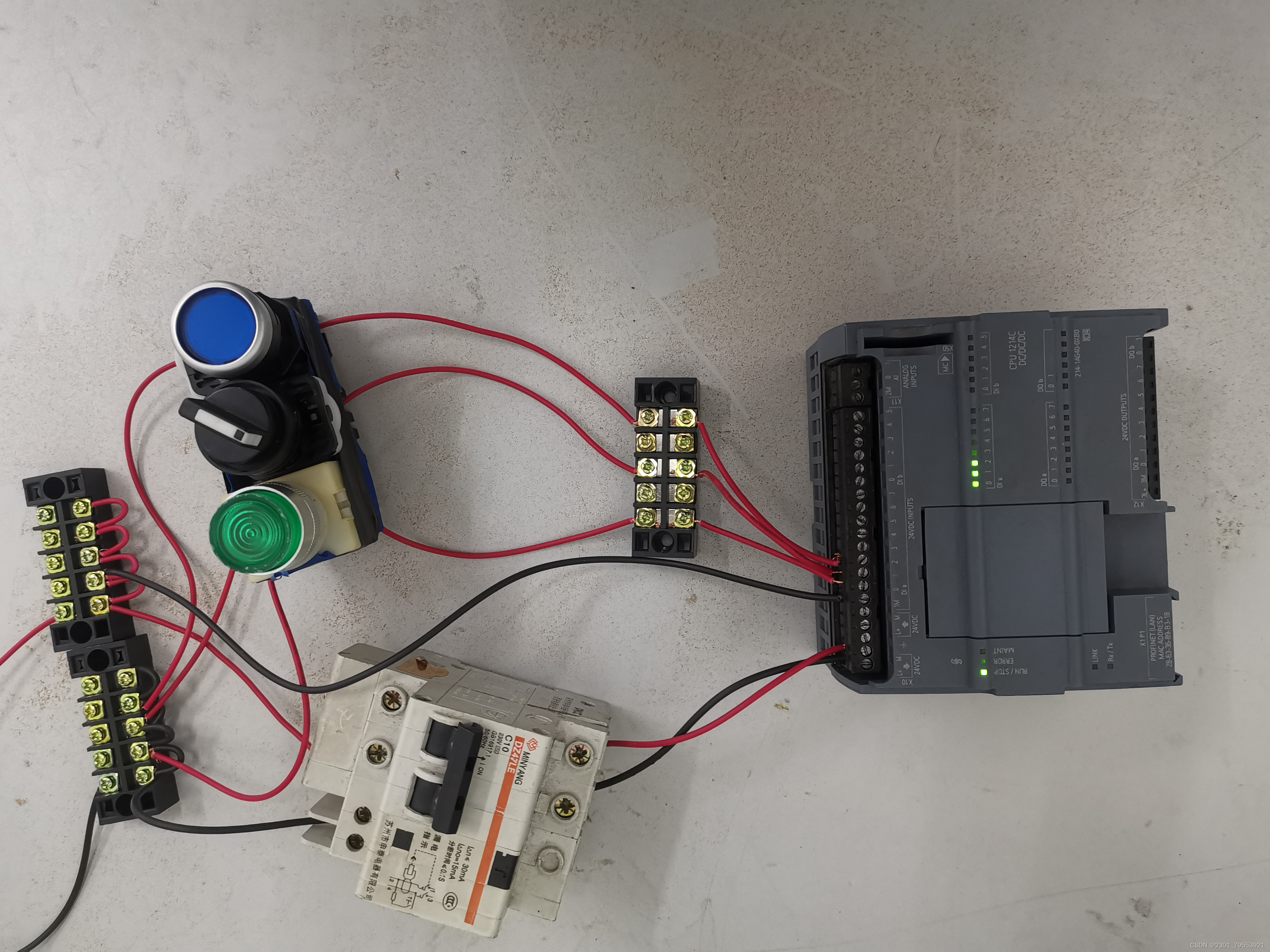
本人使用的是PLC1200 1214C DC/DC/DC型控制器,其它类型的PLC接线图可在链接中找到: 超实用!西门子S7-1200系列PLC全套接线图 - 知乎 (zhihu.com) PLC1200 1214C DC/DC/DC连接图如下
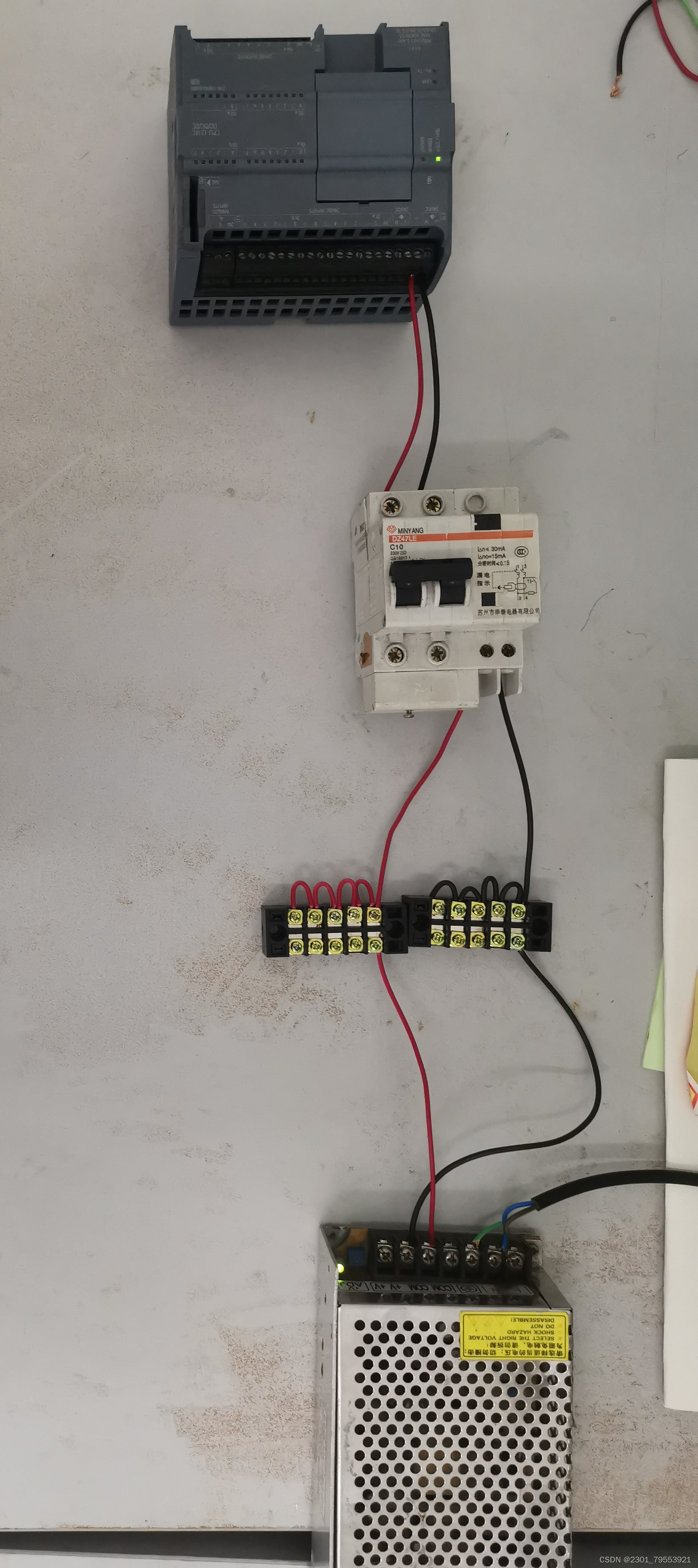
注意:输入1M端子需接电源负极。 第1步:连接空气开关这一步是为保护PLC。接线时注意左右两根线接电源正负极要对应PLC的正负极。 详细步骤:黑线接入PLC的L+端,红线接入PLC的M端;黑线接入电源正极(+V),红线接入电源公共端(COM)。
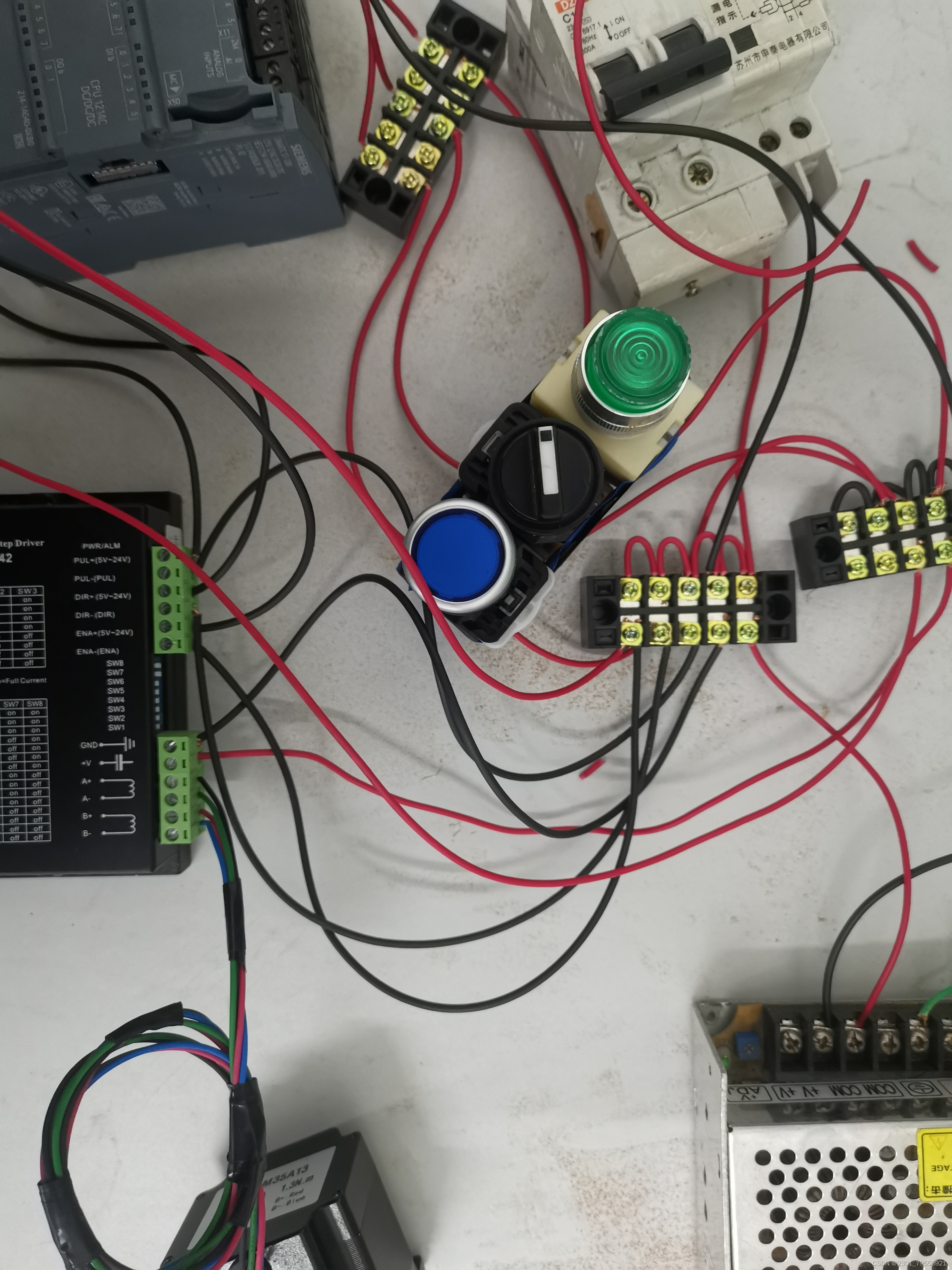
完成标志:通电后,电源亮绿灯,PLC亮绿灯。 注:图中“接线排”的作用是为后续所有需接入电源的端子并入一起,正负极输出只用一根线接到电源上,使接线简洁明了。 第2步:连接按钮开关根据PLC1200 1214C DC/DC/DC的接线图看。三个按钮开关的一端分别接在i0.0,i0.1,i0.2,分别作为启动(正转),反转,停止;按钮开关的另一端接在电源正极,如图,三根红线接在“正极接线排上”,最后从PLC的1M端引出一根线接在电源的公共端(COM)。
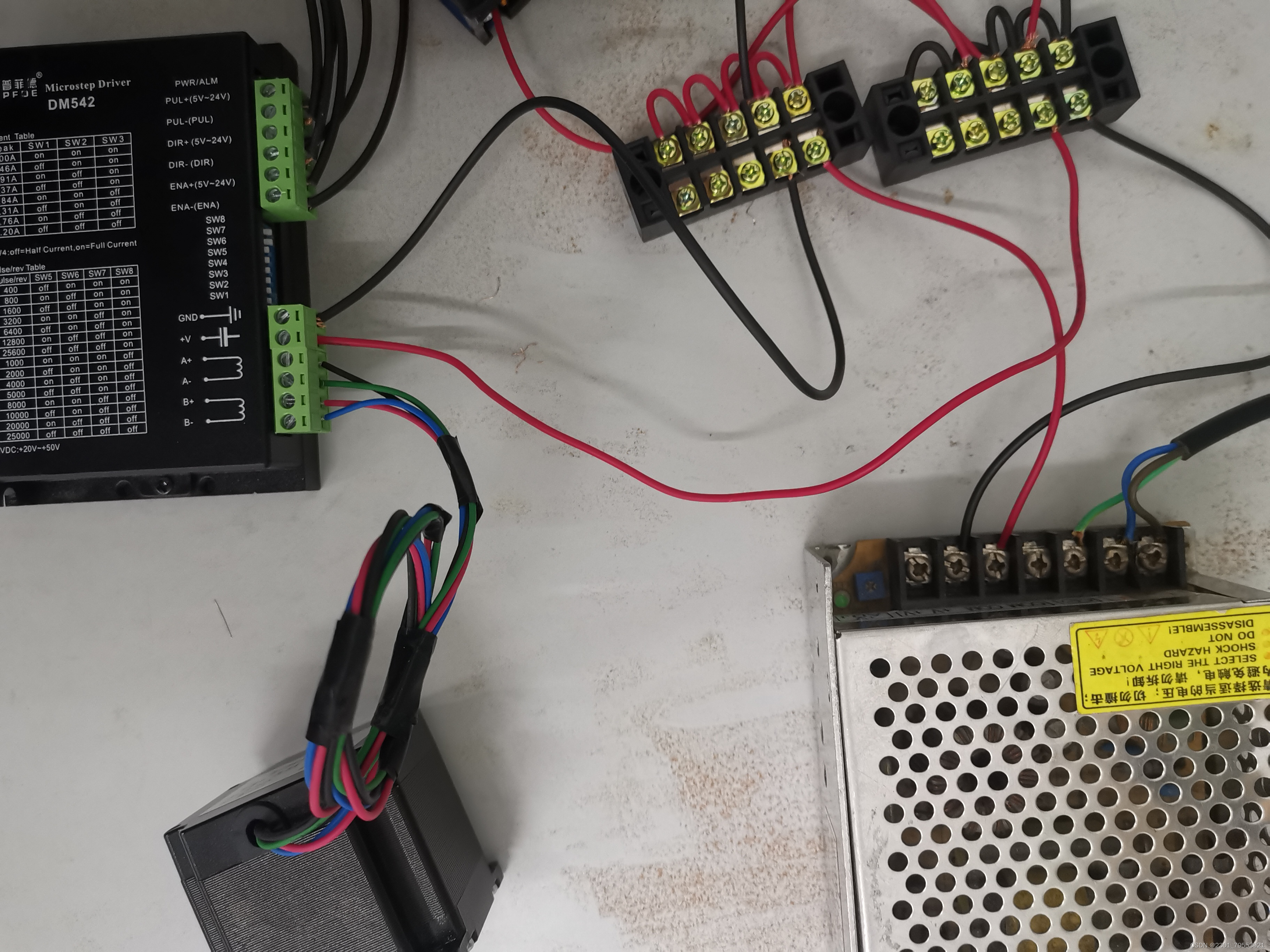
完成标志:按下按钮开关后,PLC对应的输入灯会亮。 注意:三个按钮开关使用常闭方式;PLC的1M端必须接入电源公共端(COM)。 第3步:连接42步进电机将42步进电机的四根线正确接在驱动器上的A+、A-、B+、B-(电机表面有提示),其后驱动器接上电源。
驱动器上的PUL-与DIR-与ENA-连接在电源的公共端(COM);PUL+与DIR+与ENA+分别接在Q0.0、Q0.1、Q0.2;接通PLC输出电源。 详细步骤: 1.接通PLC输出电源:3L+连接电源正极,3M连接电源公共端(COM)。 2.驱动器接地:将驱动器PUL-与DIR-与ENA-引出接在电源的公共端(COM)。 3.驱动器接通输出端口:将驱动器的PUL+与DIR+与ENA+分别接在Q0.0、Q0.1、Q0.2。
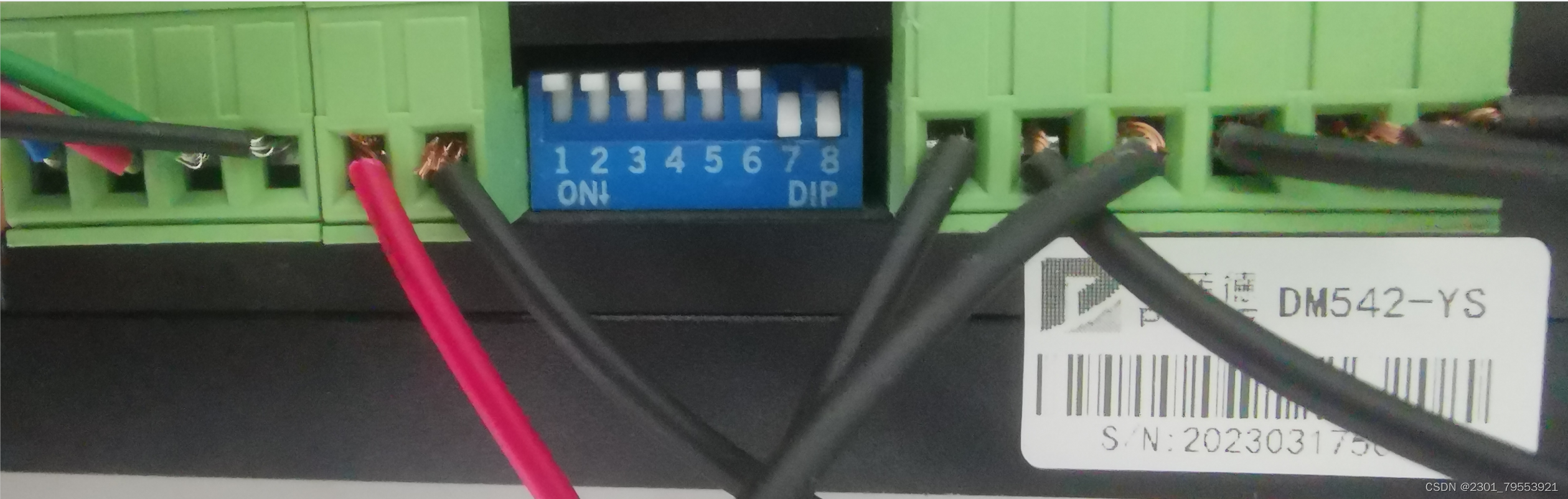
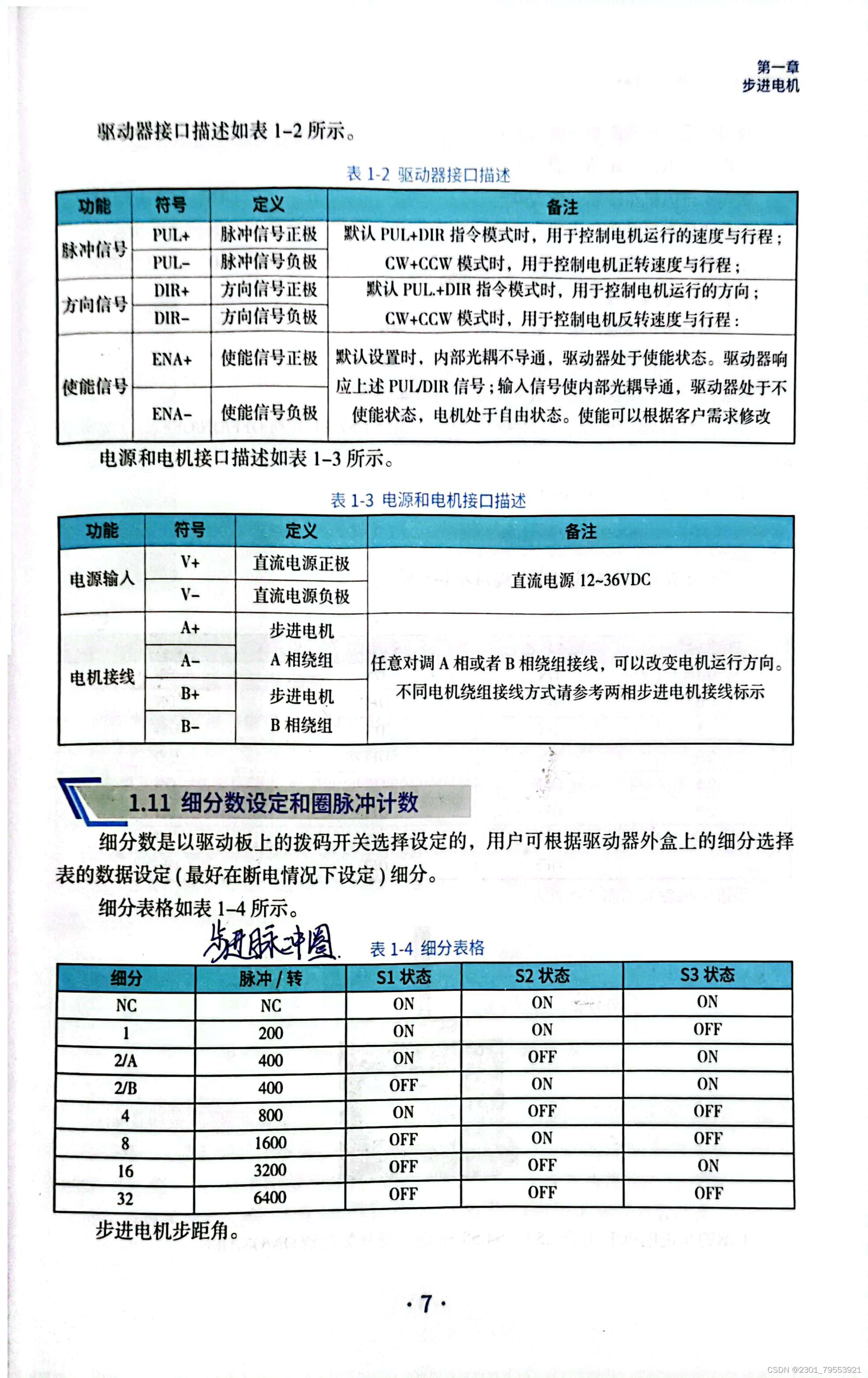
完成标志:驱动器亮绿灯。 第5步:选择细分倍和电流在驱动器的表面有关于细分倍的选择和电流的选择的表格。细分倍的选择建议选择“K8”(想详细了解的可以看备注2“步进驱动器的细分倍和电流的选择”),电流根据步进电机表面所贴的提示中的电流进行选择。 选择好后,根据驱动器上的表格选择每个开关的位置(注意:开关向上是OFF,向下是ON)。
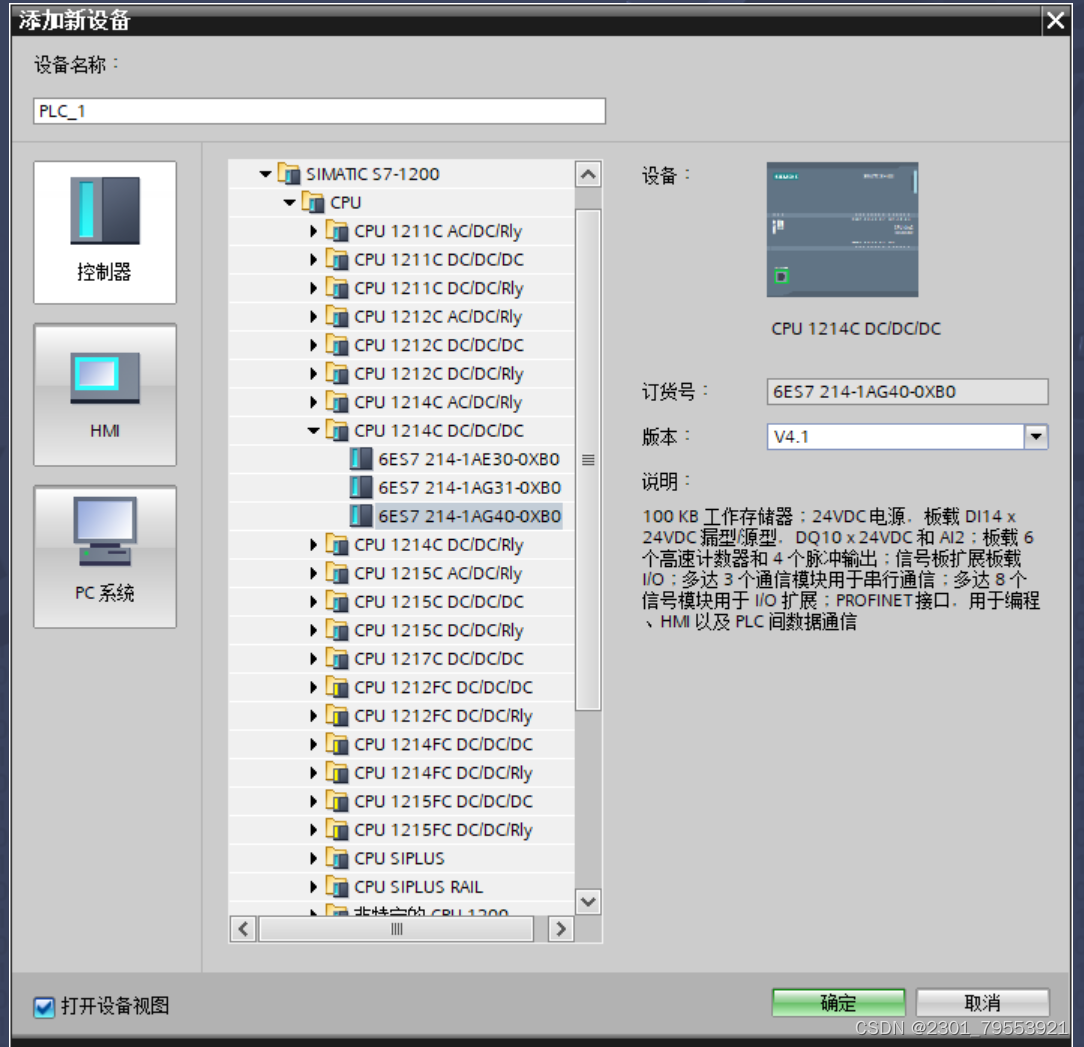
打开博图,创建新项目,添加新设备。(注:本人用版本V4.1,版本可自己选择,不建议选择过高,后续下载时出现版本不适配问题,可修改版本,修改方法见备注1)
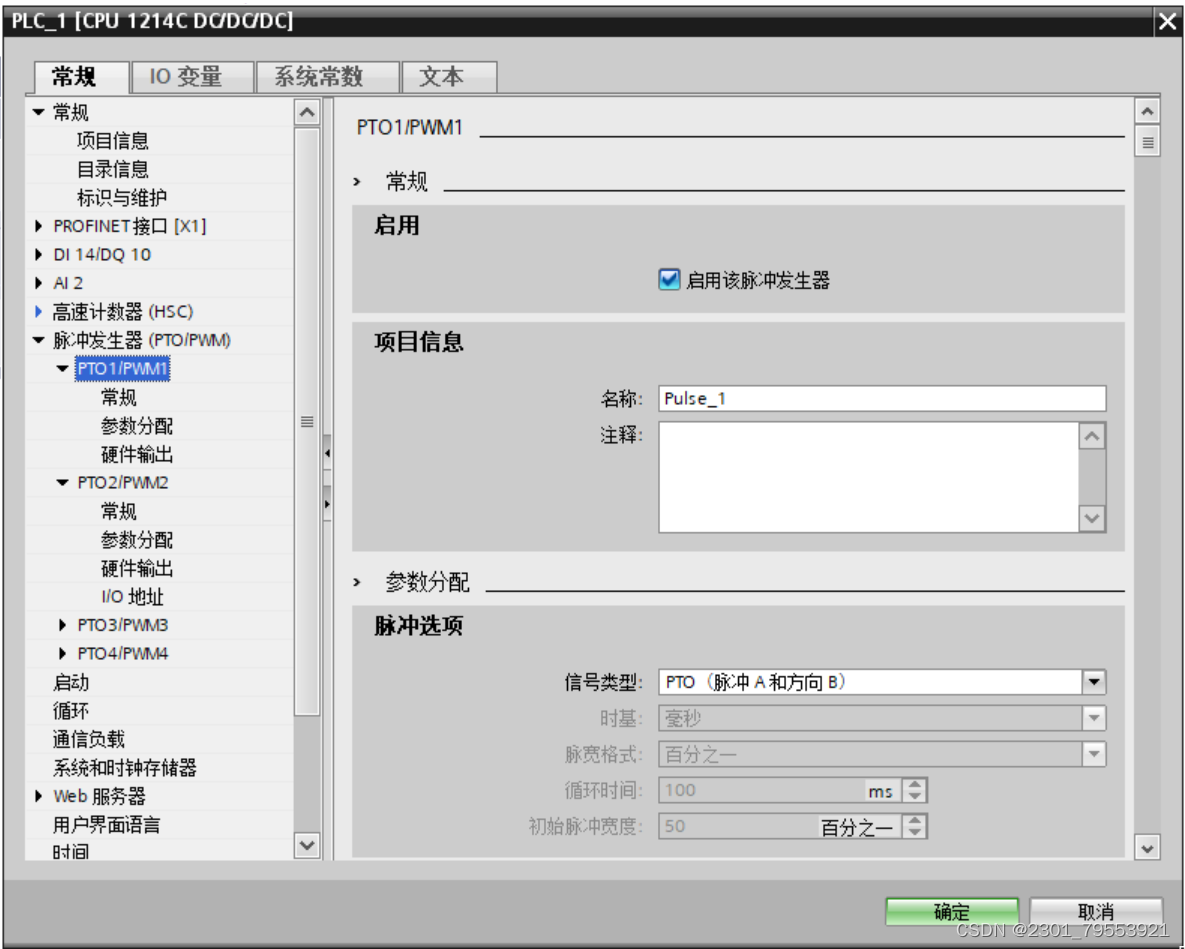
打开PLC属性;在左框中打开脉冲发生器(PTO/PWM)列表;在列表中打开PTO1/PWM1;在“启用”中,勾选“启用该脉冲发生器”,在“脉冲选项”中的“信号类型”中选择“PTO(脉冲A和方向B)”。
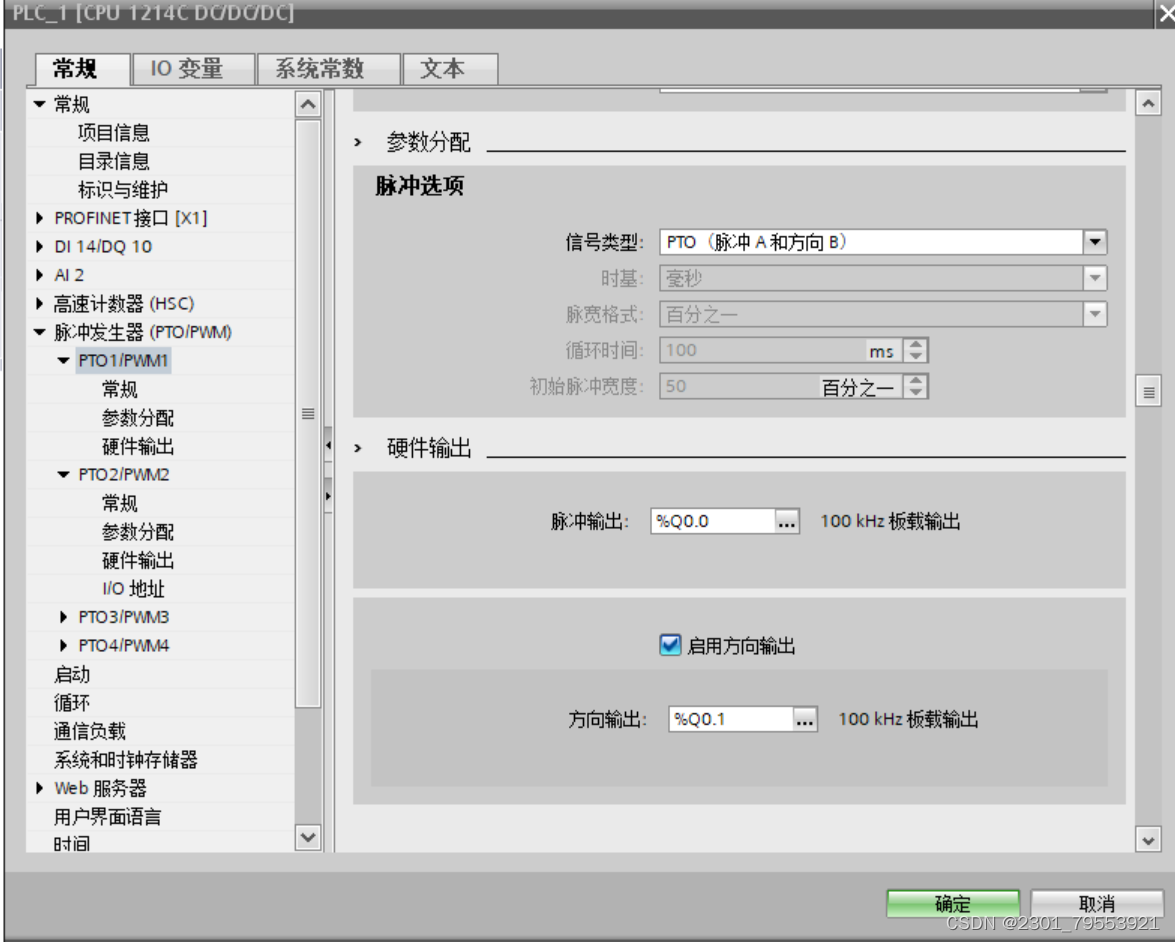
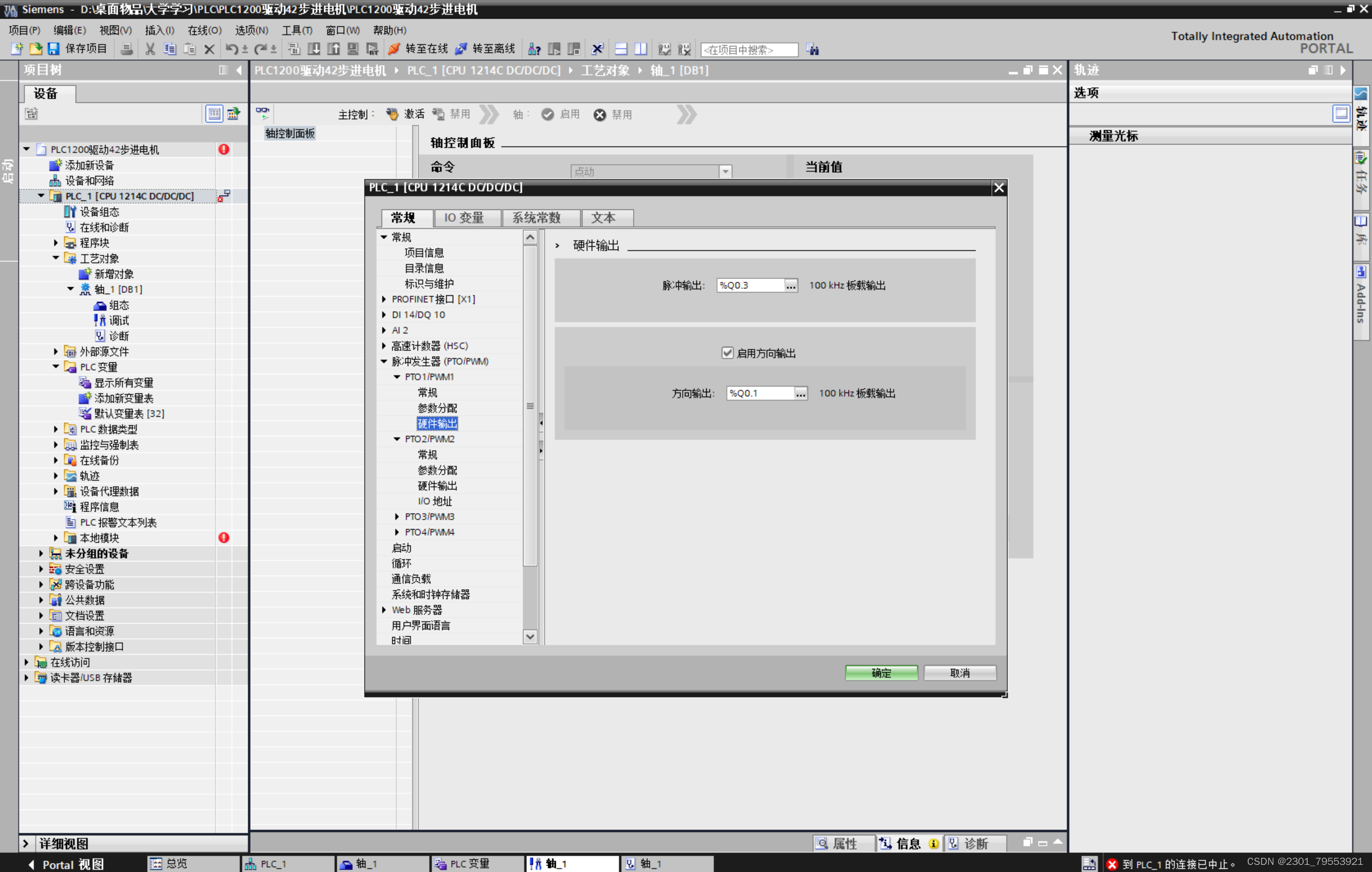
下拉,保证勾选“启用方向输出”,“脉冲输出”中是“%Q0.0”,“方向输出”是“%Q0.1”。(对应电路连接中第四步的PUL+和DIR+的连线)
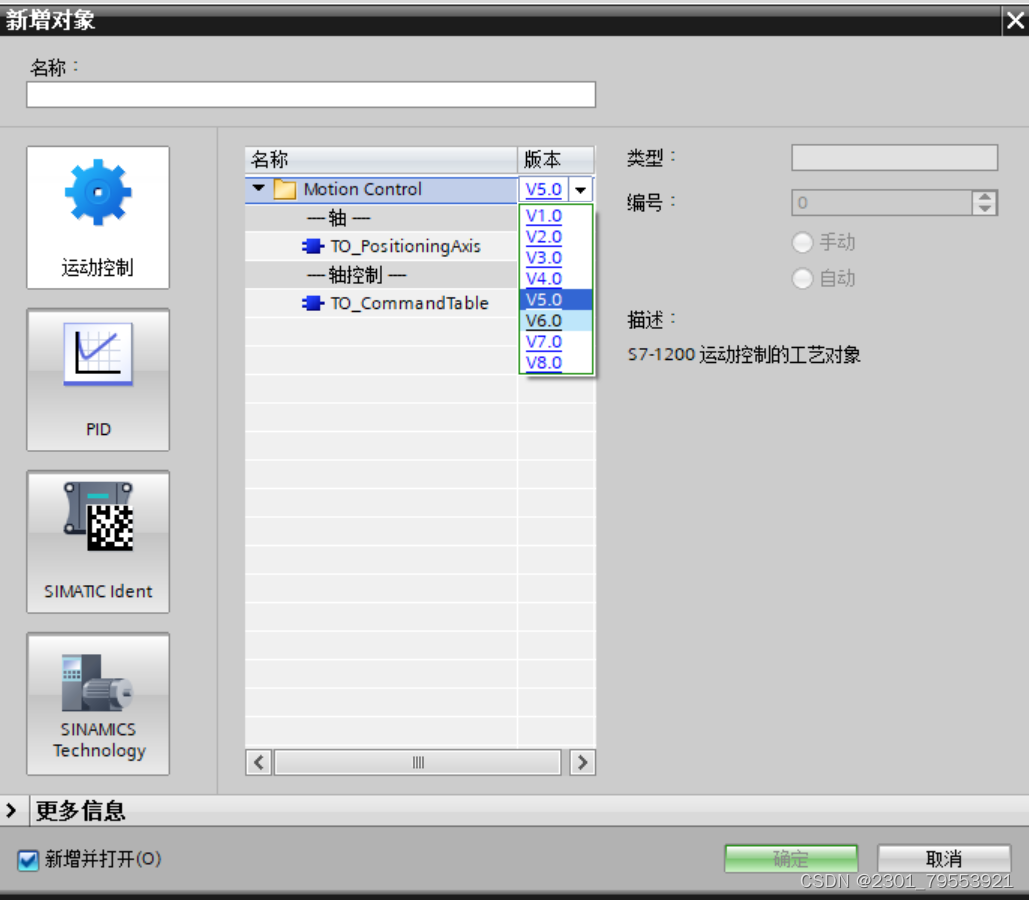
点击下方“确定”。 第3步在PLC_1中打开“工艺对象”;双击“新增对象”;在“运动控制”中点击“TO_PositionAxis”;点击“确定”(若无法添加,则看备注3中的第5条)。
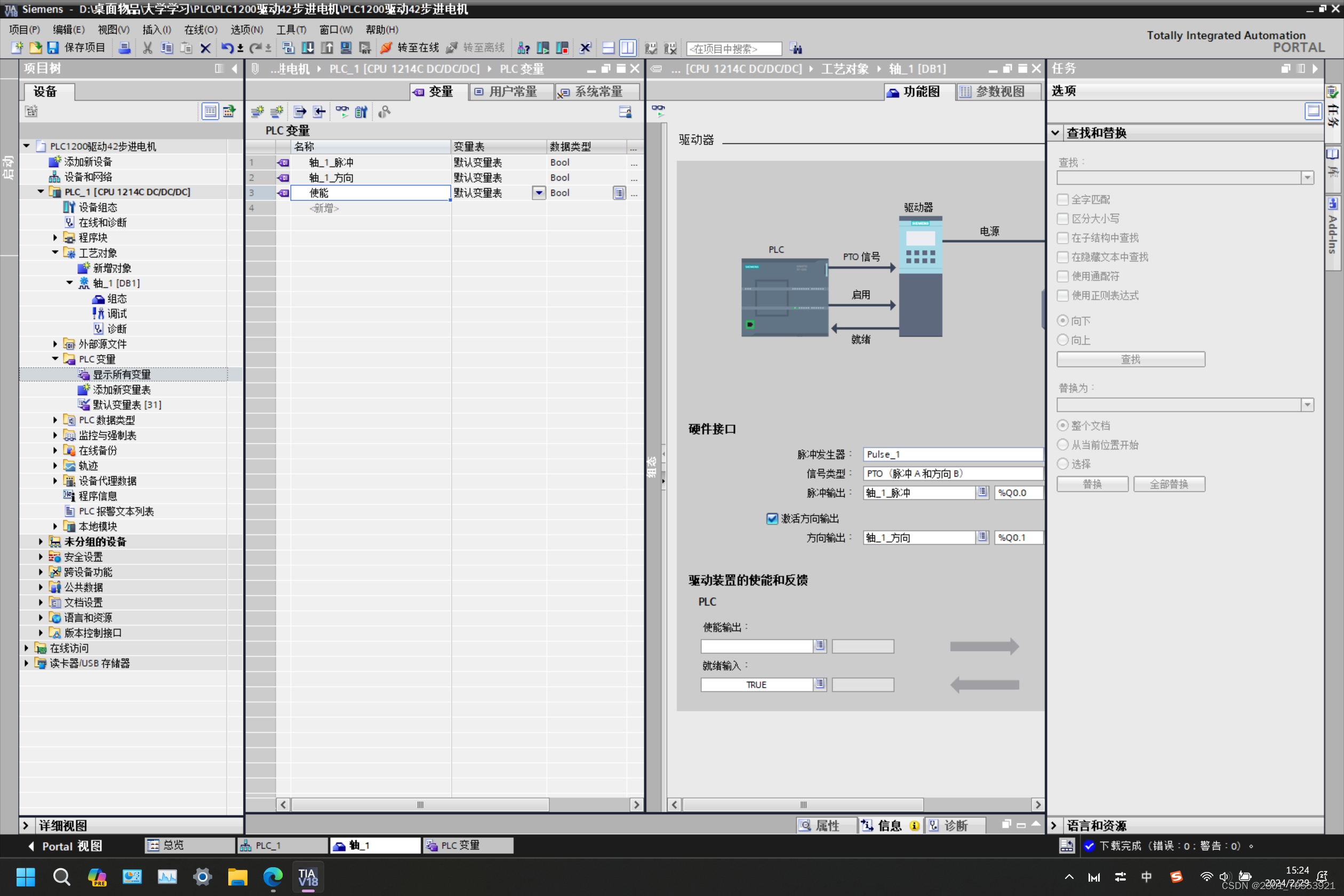
在左框中的“PLC变量”下打开“显示所有变量”,创建新变量,命名“使能”,地址改为“%M1.0”,数据类型为bool。 在新弹出的窗口中(若没有弹出,打开“工艺对象”下的“轴_1”中的“组态”)选中“常规”,更改“测量单位”中的“位置单位”(建议更改成“脉冲”)。 双击左列的“驱动器”,在“脉冲发生器”一栏中选择“Pulse_1”,在下方的“使能输出”中添加之前创建的变量“使能”。
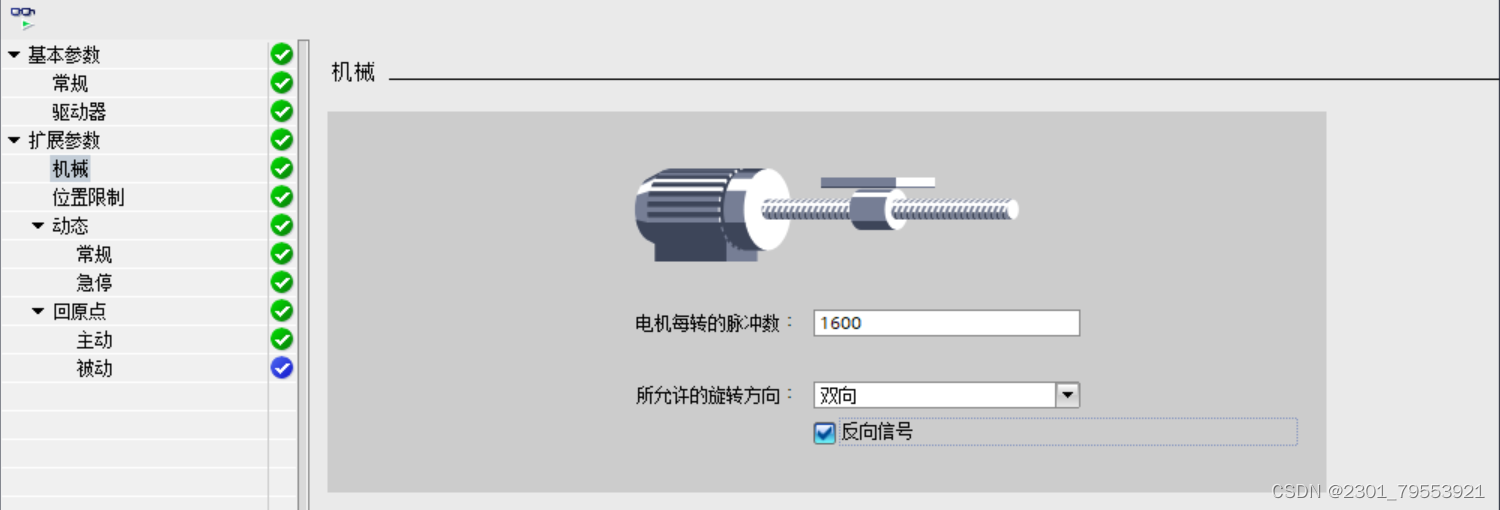
在左列中打开“机械”,输入“电机每转的脉冲数”,大小为驱动器上细分倍中“Pulse”一列所选择的数据,本人选择是1600(意为电机轴旋转一圈需要1600个脉冲)。 勾选下方的“反向信号”。
在左列中打开“扩展参数”下的“动态”中的“常规”,填写“最大转速”和“启动/停止速度”。
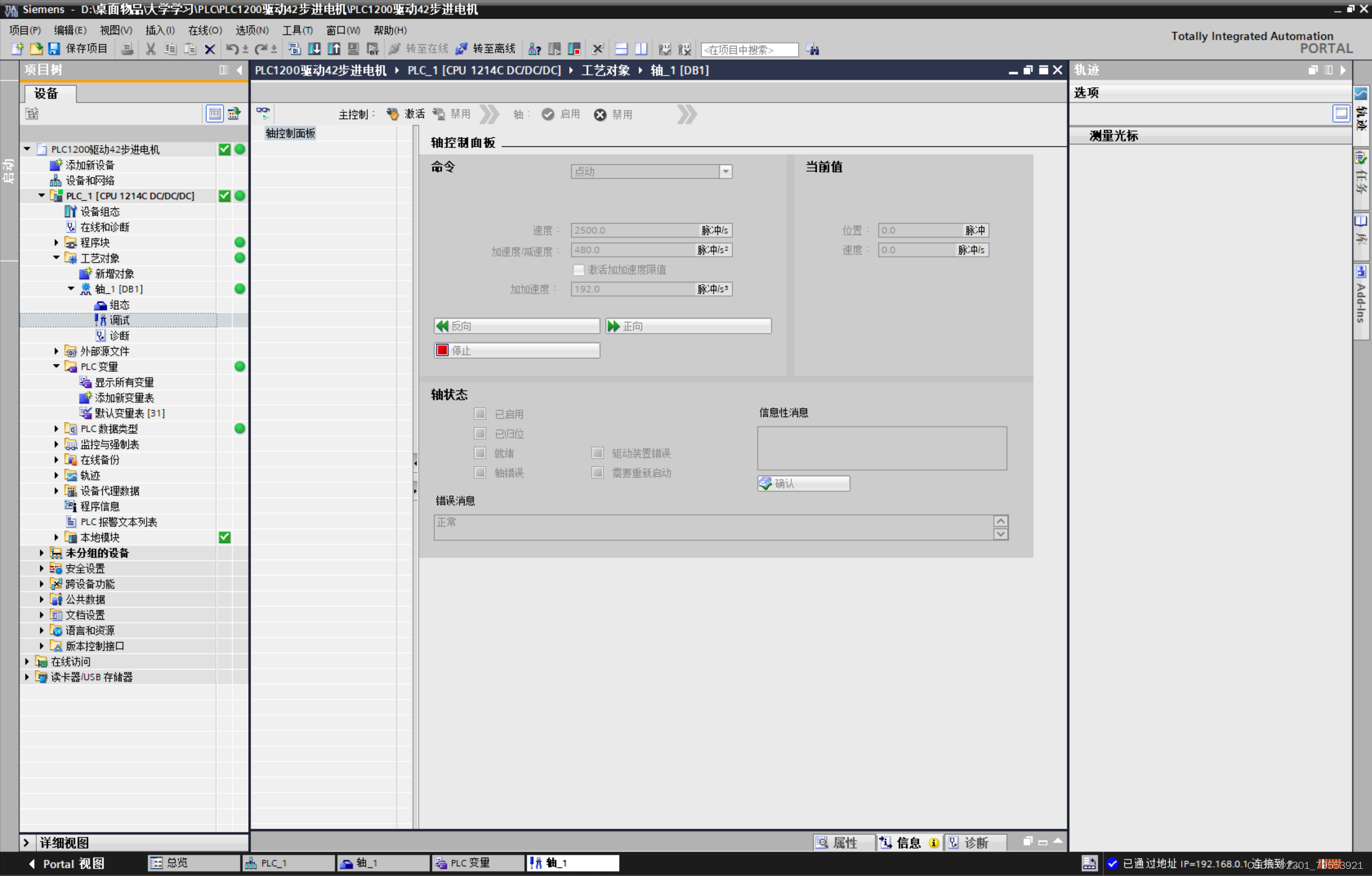
保存程序; 下载入PLC中; 点击“转至在线”; 打开“PLC_1”下的“工艺对象”中“轴_1”下的“调试”;
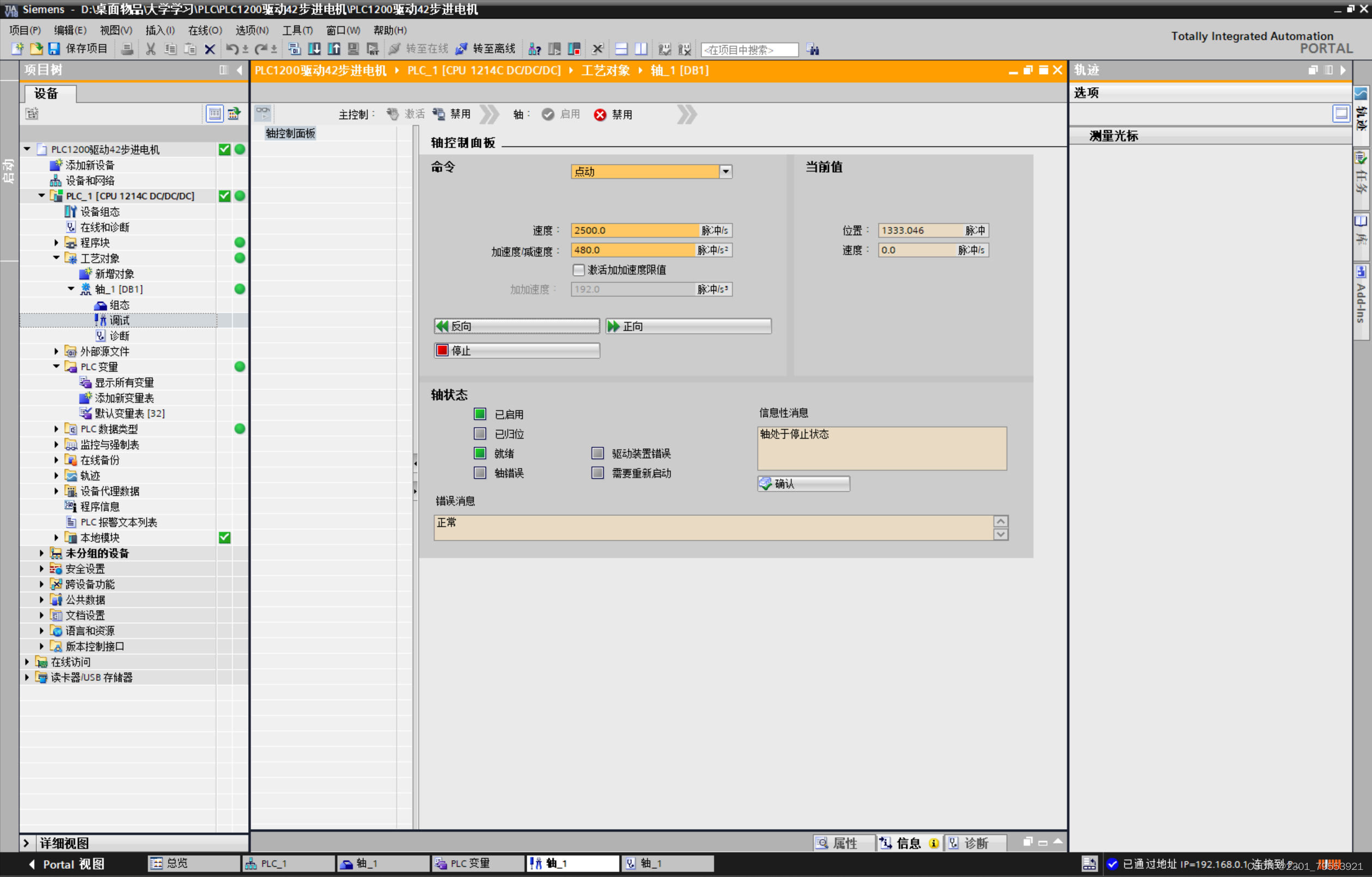
点击屏幕中间偏左方向的“激活”;再点击右边的“启用”(若无法选中“启用”,则看备注3的第1条)。
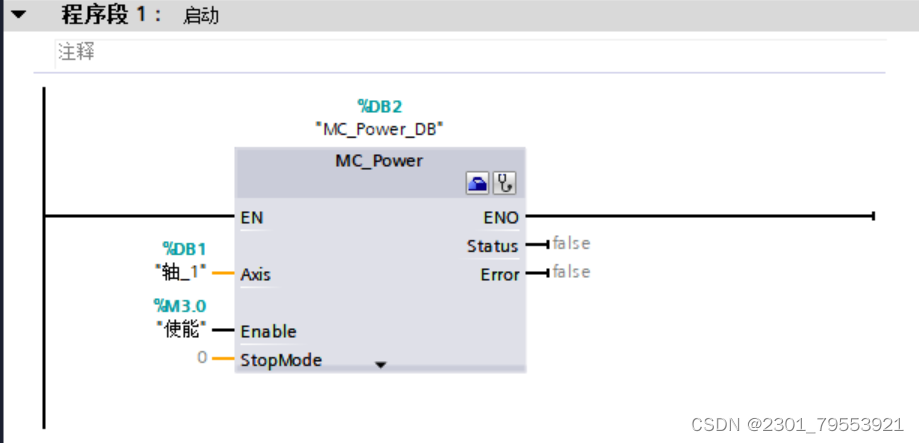
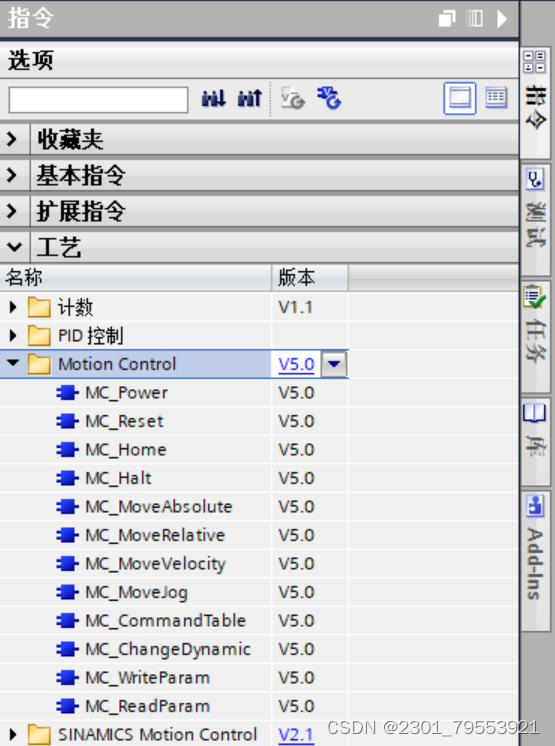
更改“速度”和“加速度/减速度”,其中“速度”不能超过“组态”中设定的“最大转速”。 其后点击“正向”,再点击“反向”,电机反转,到这里,调试完成(若无法反转,则看备注3中的第2条)。 四.编程 1.介绍控制电机旋转的指令在“指令”中的“工艺”下的“Motion Control”(若出现程序块无法调用情况,则看备注3的第4条),本篇只介绍常用指令(若想学习详细与更多指令,请参考指令手册)。 1)MC_Power(启动、禁用轴)
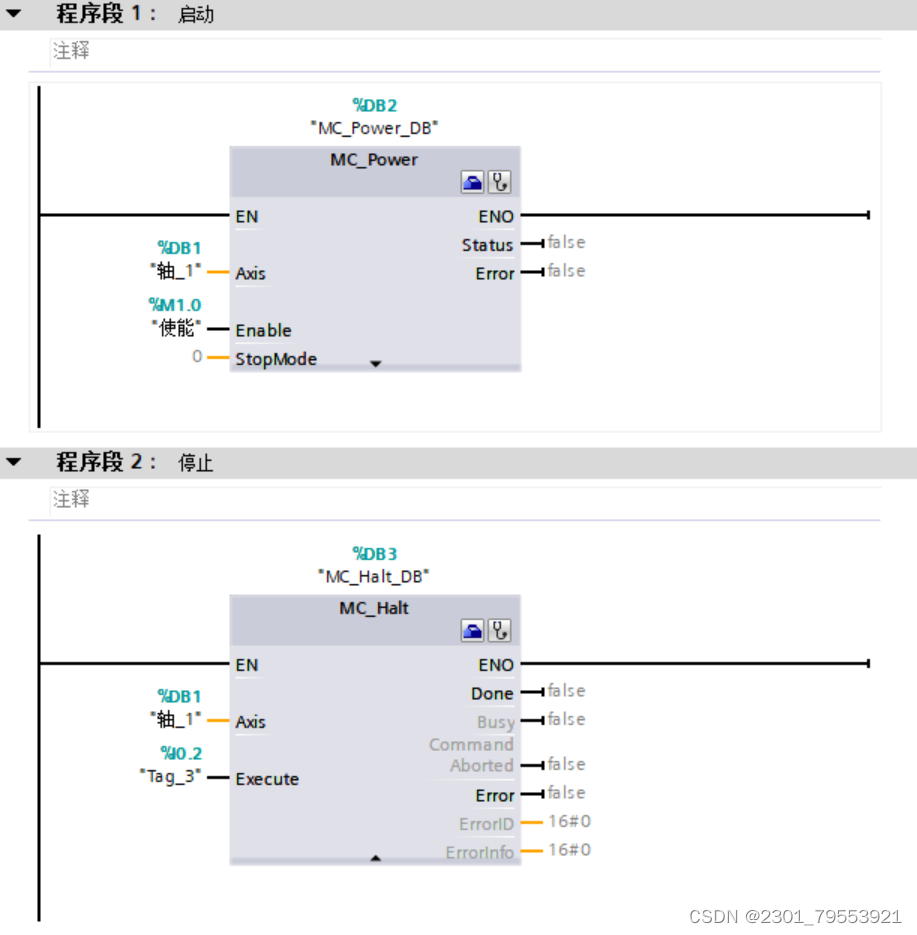
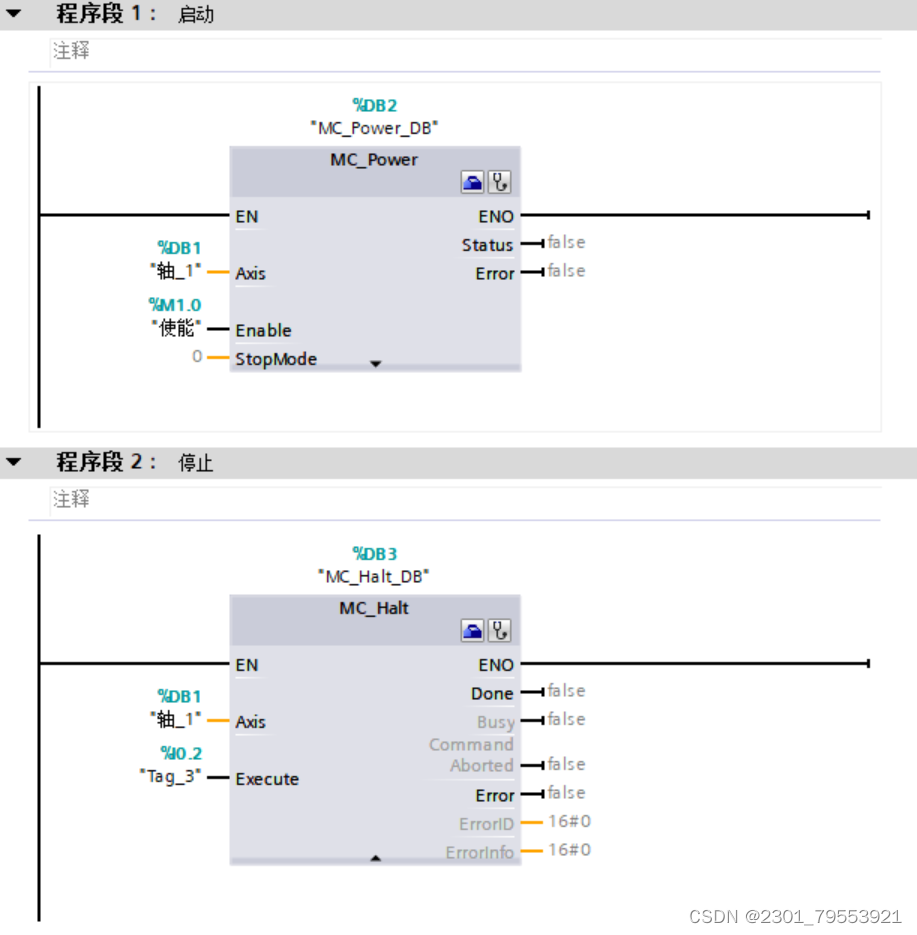
作用:使能电机。 Axis:将创建的“轴_1”拖到这里。 Enable:将“PLC变量”下的“显示所有变量”中的变量“使能”拖到这里。 (详细介绍请看指令手册) 2)MC_Reset(确认故障、重启工艺对象)
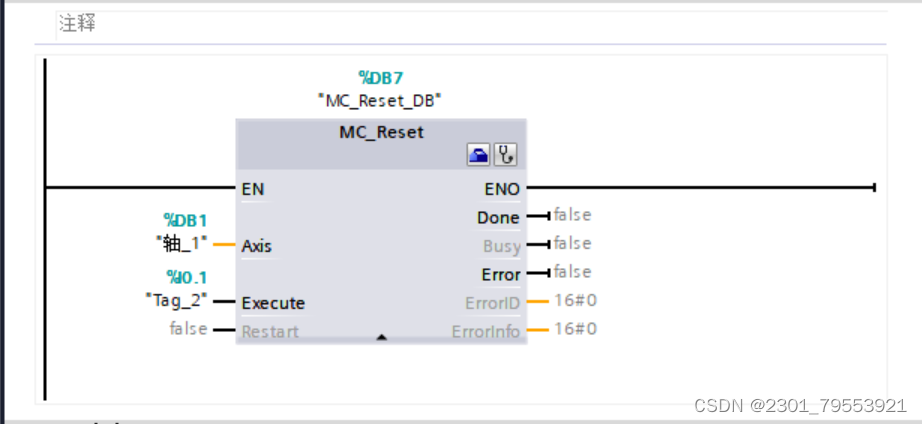
作用:遇到故障后,重启电机。 Axis:将创建的“轴_1”拖到这里。 Execute:输入按钮,上升沿时启动命令。 (详细介绍请看指令手册) 3)MC_Halt(停止轴)
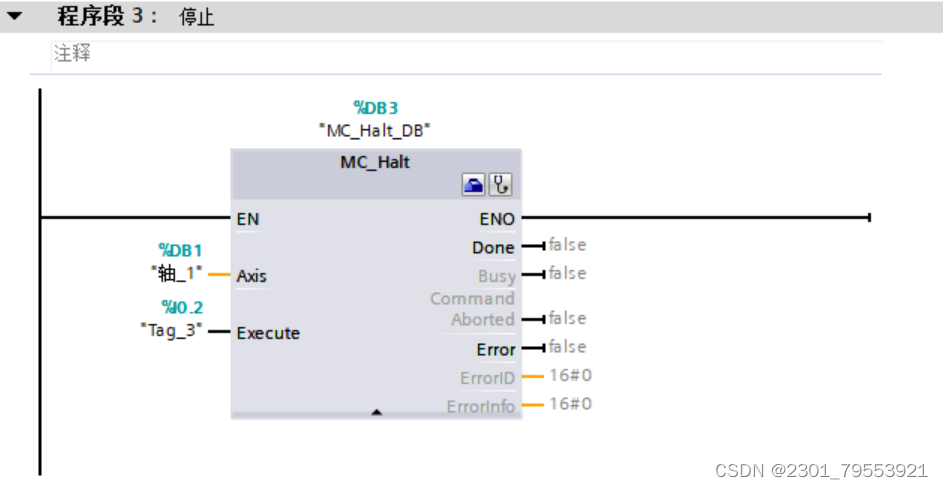
作用:暂停电机。 Axis:将创建的“轴_1”拖到这里。 Execute:输入按钮,上升沿时启动命令,电机暂停。 (详细介绍请看指令手册) 4)MC_MoveAbsolute(轴的绝对定位)
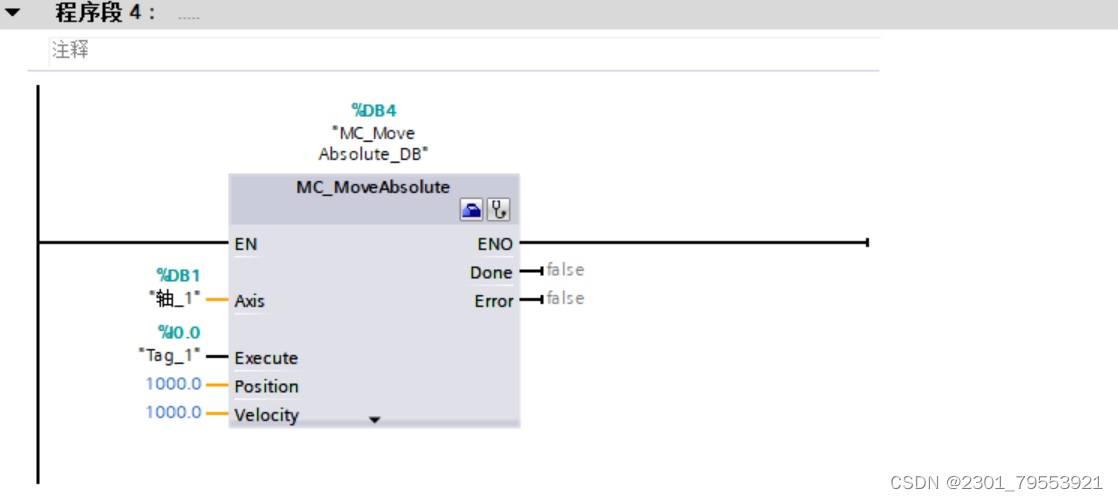
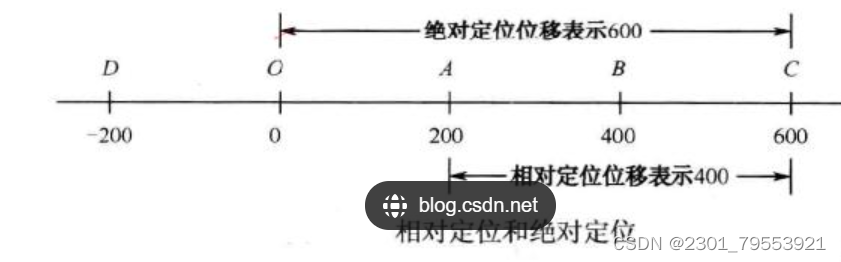
作用:以“原点”开始运动的距离。 Axis:将创建的“轴_1”拖到这里。 Execute:输入按钮,上升沿时启动命令,电机启动。 Position:从原点开始到“Position”的距离(可见备注4理解)。 Velocity:电机轴转动的速度。 (详细介绍请看指令手册) 5)MC_MoveRelative(轴的相对定位)
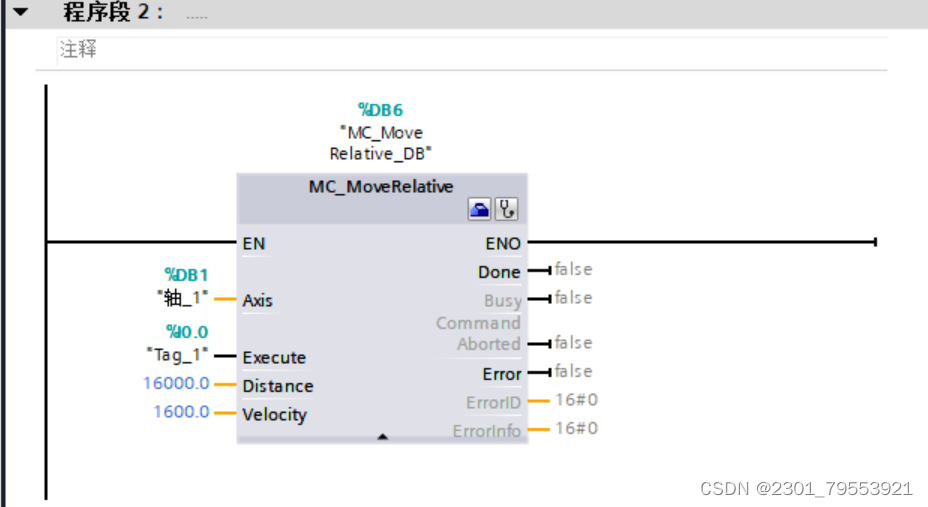
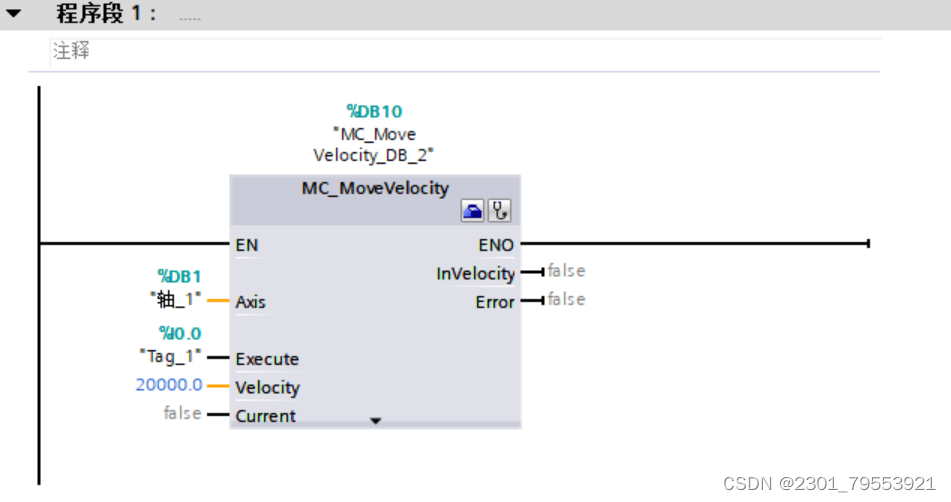
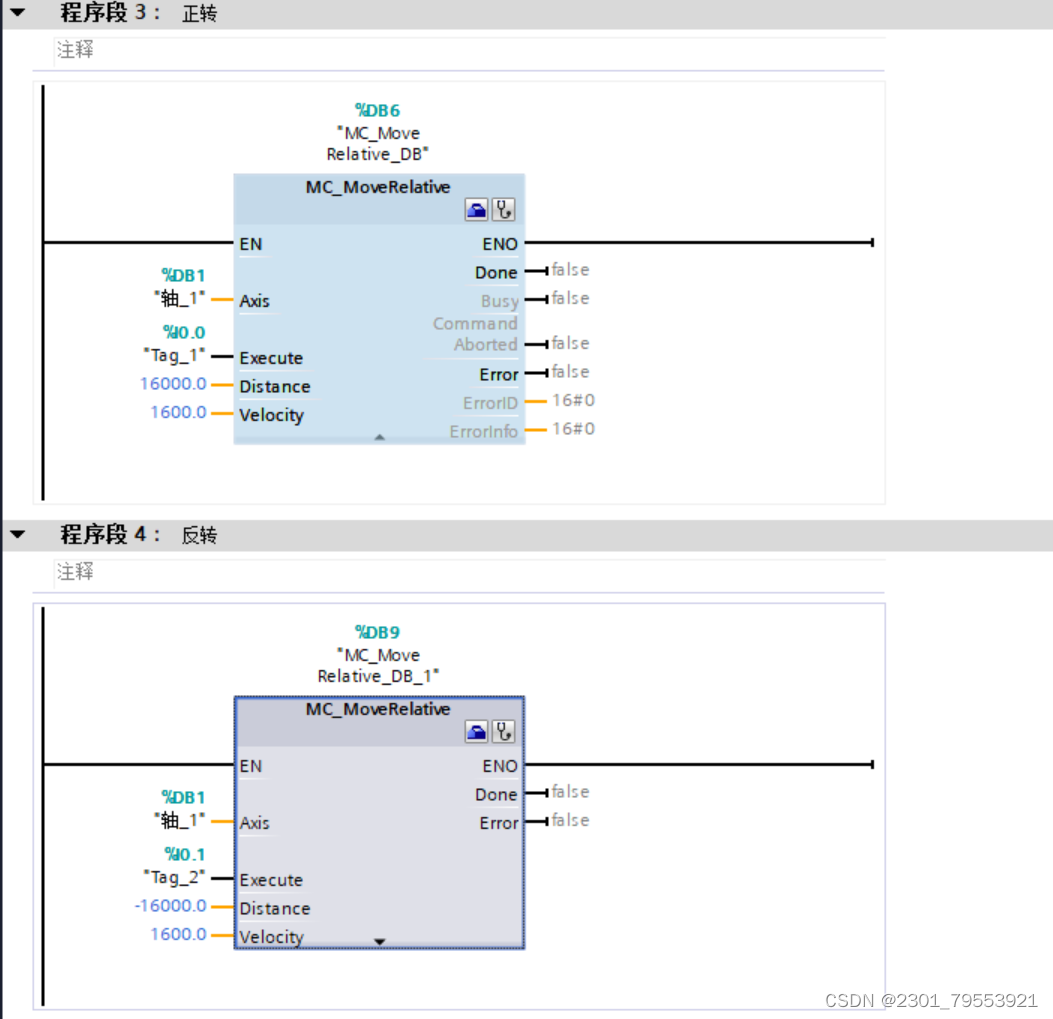
作用:以“此时轴所在位置”开始运动的距离。 Axis:将创建的“轴_1”拖到这里。 Execute:输入按钮,上升沿时启动命令,电机启动。 Position:从此时轴所在的位置开始运动“Position”距离(可见备注4理解)。 Velocity:电机轴转动的速度。 (详细介绍请看指令手册) 6)MC_MoveVelocity(以设定速度移动轴)
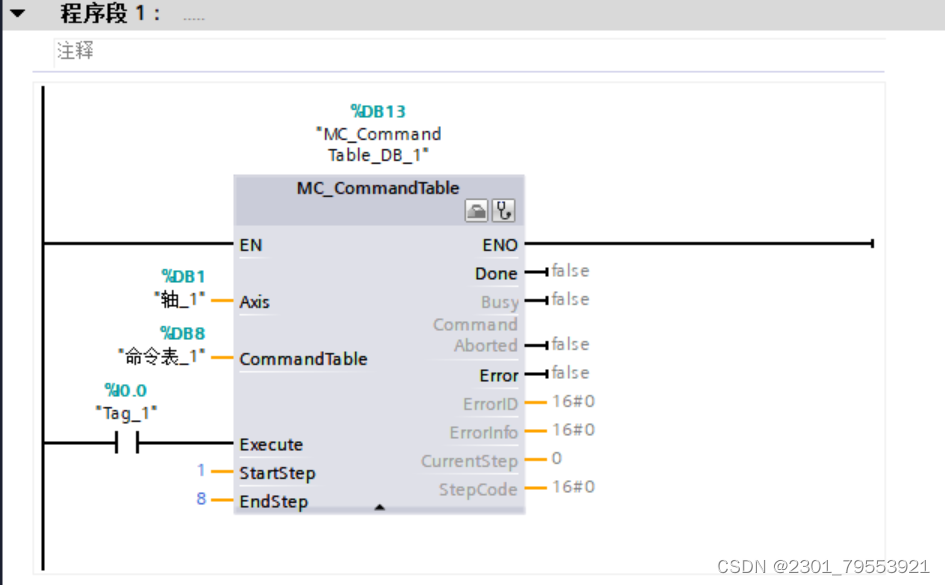
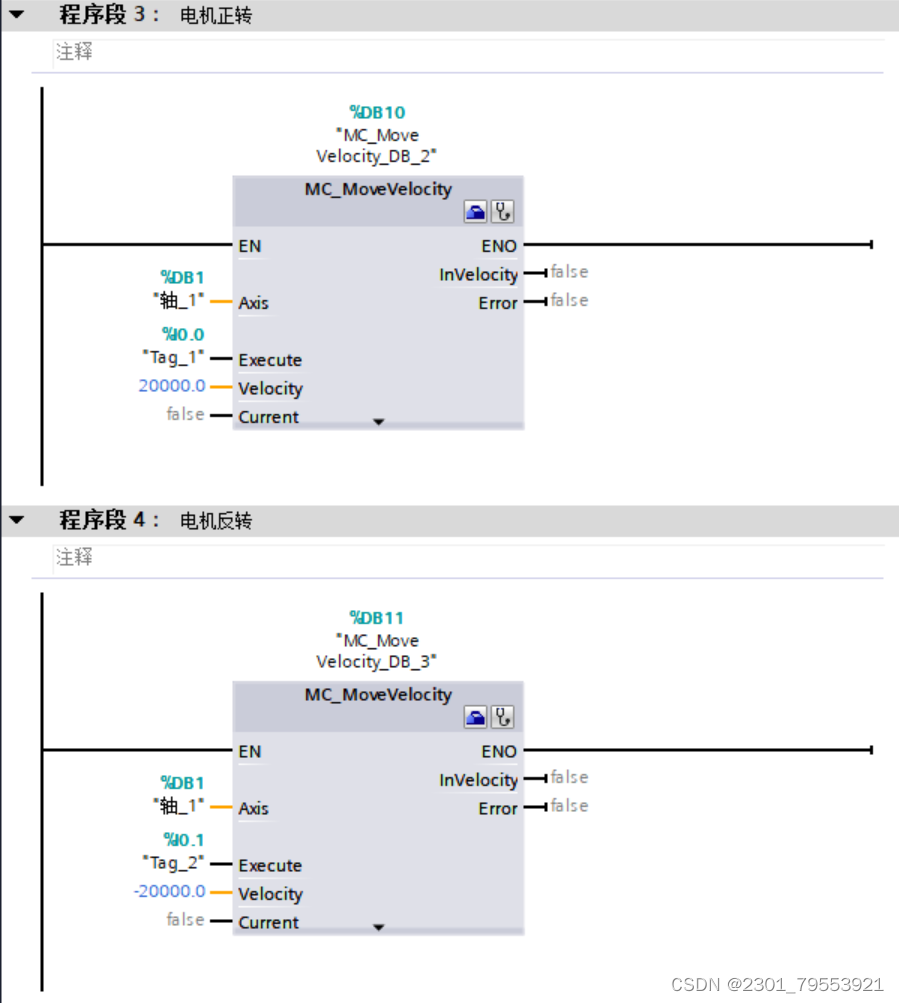
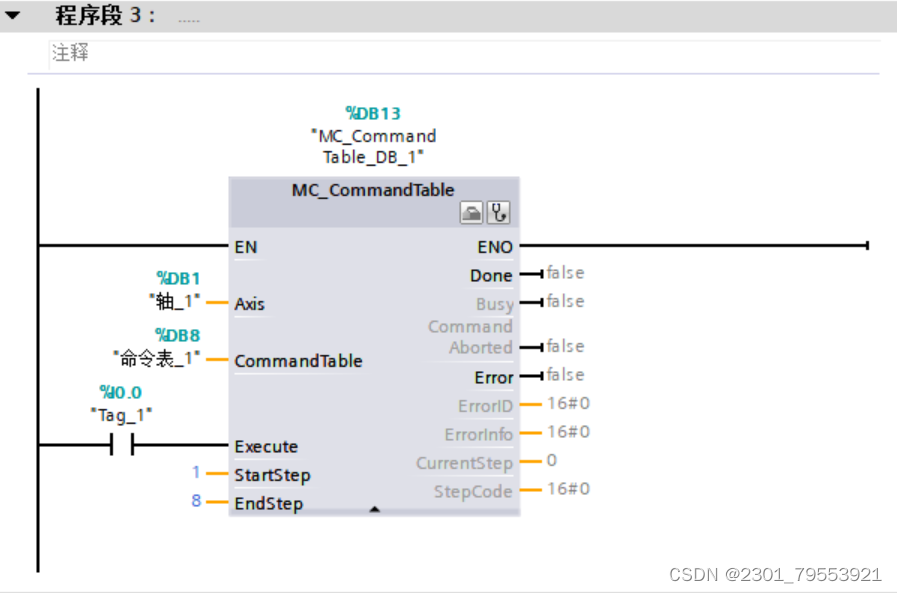
作用:以恒定速度旋转。 Axis:将创建的“轴_1”拖到这里。 Execute:输入按钮,上升沿时启动命令,电机启动。 Velocity:电机轴转动的速度。 (详细介绍请看指令手册) 7)MC_CommandTable(按照运动顺序运行轴命令)
作用:按照预先设定的运动程序进行执行。 Axis:将创建的“轴_1”拖到这里。 CommandTable:将创建的“命令表_1”拖到这里(后续实验中会涉及到)。 Execute:输入按钮,上升沿时启动命令,电机启动。 StartStep:命令表开始执行的步限值。 EndStep:命令表开结束执行的步限值。 (详细介绍请看指令手册) 2.实验 1)控制电机旋转固定角度电机旋转频率为1600HZ,旋转一圈需要1600个脉冲。要求电机轴旋转正反旋转10圈。 正转反转停止i0.0 i0.1 i0.2
下载; 转至在线; 变量“使能”更改为1; 按下“i0.0”,电机旋转10圈; 按下“i0.1”,电机反转10圈; 按下“i0.2”,电机在旋转时停止。 2)控制电机旋转速度要求电机轴旋转速度为1600(一秒一圈),正反旋转。 正转反转停止i0.0 i0.1 i0.2
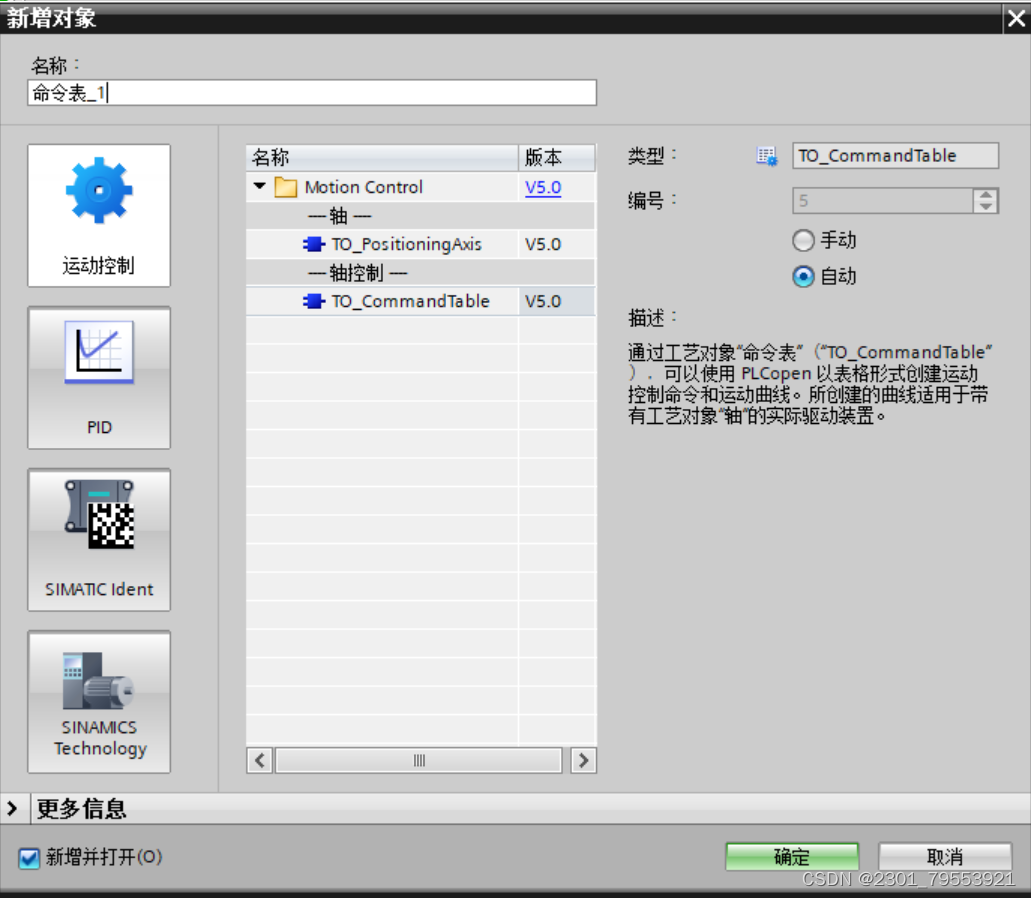
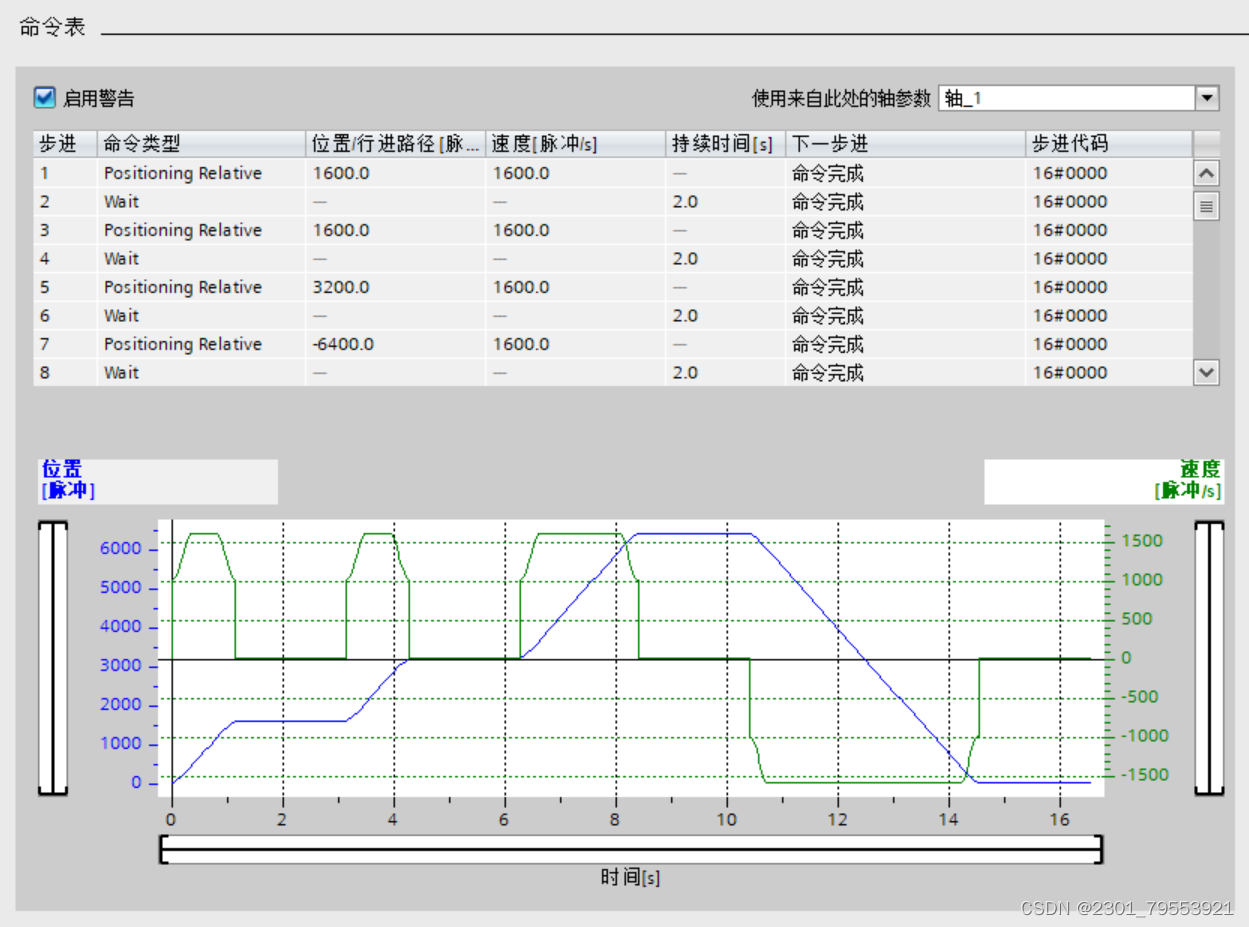
下载; 转至在线; 变量“使能”更改为1; 按下“i0.0”,电机旋转; 按下“i0.1”,电机反转; 按下“i0.2”,电机在旋转时停止。 3)控制电机完成连续的动作要求电机完成以下动作:1s旋转1圈;等待2s;1s旋转1圈;等待2s;2s旋转2圈;等待2s;4s反向旋转4圈,;等待2s。 在“PLC_1”中打开“工艺对象”;双击“新增对象”;选择“轴控制”;点击“确定”。
打开“命令表_1”下的“组态”,在“基本参数”中打开“命令表”,将“使用来自此处的轴参数”更改为“轴_1”。 在命令列表中选择指令,常用指令见上述。
设置好后,打开Main。
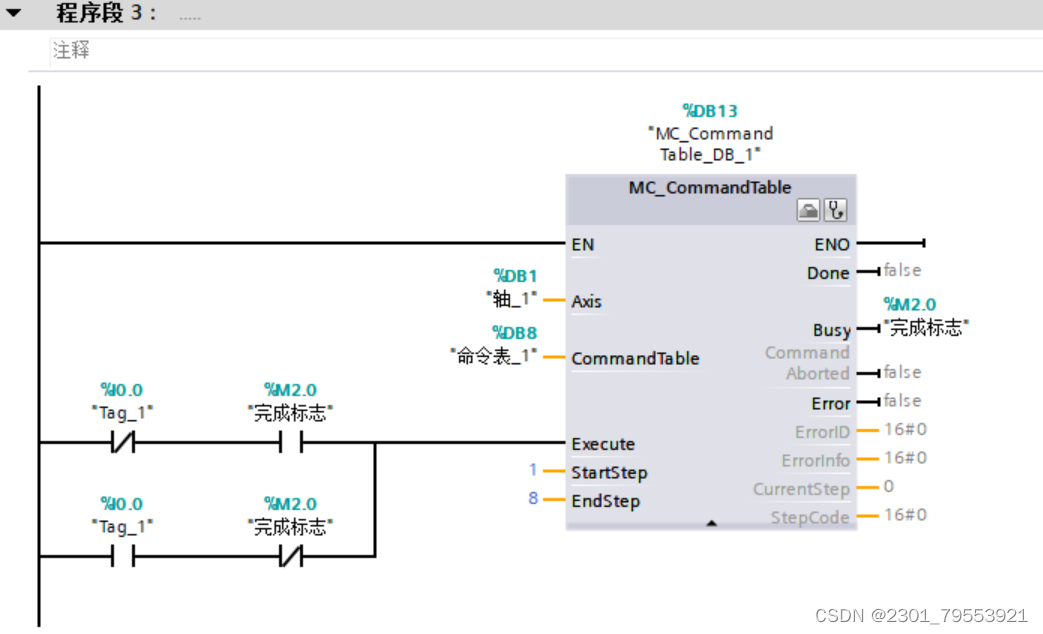
下载; 转至在线; 变量“使能”更改为1; 按下“i0.0”,电机按照命令表指令开始执行; 按下“i0.2”,电机在旋转时停止。 4)电机循环完成一套动作要求:在上一个实验的基础上,让电机循环执行动作。
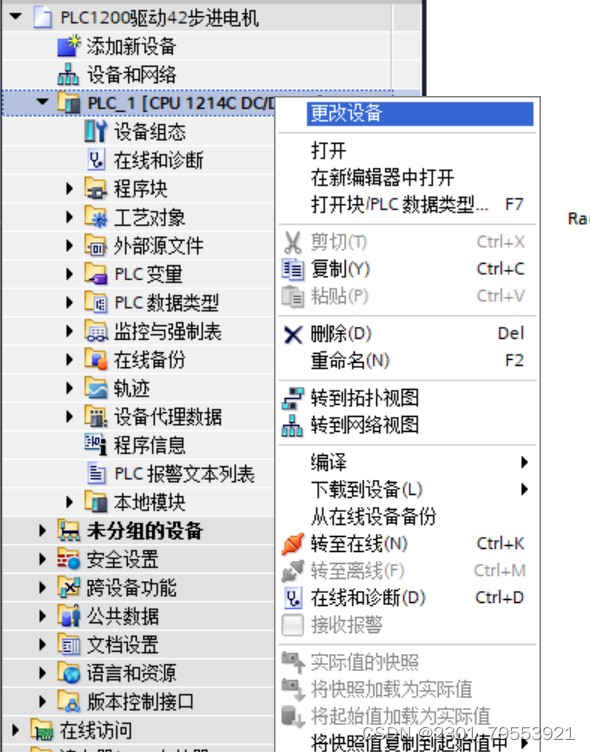
下载; 转至在线; 变量“使能”更改为1; 按下“i0.0”,电机按照命令表指令开始循环执行; 按下“i0.2”,电机在旋转时停止。 备注 1.修改PLC版本1)右击PLC_1点击更改设备
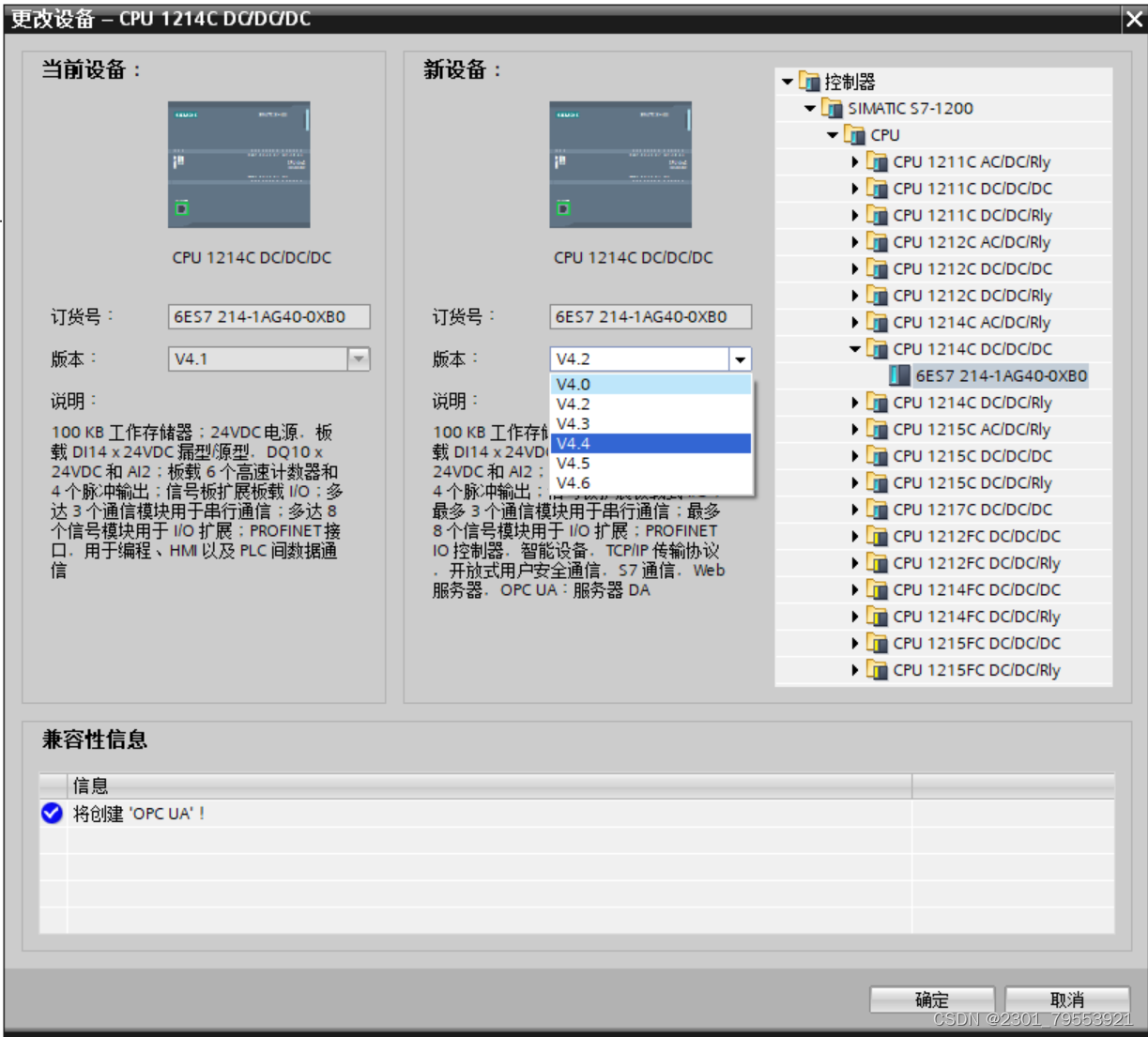
2)在右框中选择CPU型号,进而更改版本。
出现这种情况,可能问题是PLC输出端口接线不牢。 解决方法:更改驱动器PUL+与PLC输出端口的连接,将连接在Q0.0上的线更换到Q0.3上;打开“PLC_1”的属性,在“脉冲发生器”下面的“PTO1/PWM1”下的“硬件输出”中更改脉冲输出,改为“%Q0.3”;点击“确定”。
重复操作“三.调试”中的“第6步”。 注意:如果仍然不行,则可继续更换输出PLC的输出端口。 2)电机无法反转电机无法反转的原因与上一种情况类似,PLC的输出端口接触不良。 解决方法:更改驱动器的DIR+端与PLC输出端的连接,将Q0.1换为Q0.4或Q0.5,其余操作与上述问题类似。 3)驱动器不亮绿灯,亮红灯出现此问题有两种原因,接线错误或驱动器损坏。 解决方法:检查连接线路,按照步骤重新梳理一遍;更换驱动器。 4)Motion Control无法调用程序块解决方法:更改版本。
解决方法:更改版本。
假设轴此时所在位置在200处,两种方式走到600处。第一种是绝对定位,从原点开始走600;第二种是相对定位,从本位置开始走400。
|








【本文地址】
今日新闻 |
推荐新闻 |