学术前沿 |
您所在的位置:网站首页 › wps表格怎么居中打印在a4纸上 › 学术前沿 |
学术前沿
|
Key words: 3D LiDARpoint cloudpoint cloud fusionobject extraction3D representationubiquitous point cloud 激光扫描/激光雷达(light detection and ranging,LiDAR)是一种非接触主动式快速获取物体表面三维密集点云的技术,已成为高时空分辨率三维对地观测的一种主要手段[1]。该技术可直接获取具有三维坐标(X, Y, Z)和一定属性(反射强度等)的海量、不规则空间分布的三维点云,而且受天气影响小,同时具有一定的穿透性,在全球变化、智慧城市、资源调查、环境监测、基础测绘等领域发挥越来越重要的作用[2]。 经过20多年的发展,三维激光扫描硬件在稳定性、精度、易操作性等方面取得了长足的进步,尤其是在机载/车载/地面三维激光扫描方面进展显著,其中具有代表性的三维激光扫描硬件研制厂商包括:Riegl、Leica、Optech、Velodyne、北科天绘、海达数云等。此外还有美国NASA的ICESat和中国资源三号02星搭载的激光雷达。 在三维点云数据处理软件方面,商业化的软件主要有TerraSolid公司的TerraSolid、Trimble公司的RealWorks、Leica公司的Cyclone、Bentley公司的Pointools、Orbit GT公司的Orbit Mobile Mapping等,以及国内科研院所和公司开发的一些工具软件。其重点主要集中在点云数据的管理、面向DEM生产的滤波[3-4]、三维建筑物提取及重建[5-6]、森林垂直结构参数提取[7]等方面。相对三维激光扫描硬件设备的快速发展而言,三维点云的智能化处理发展较为落后,点云处理的智能化水平、软件界面友好性、专业化应用数据接口等方面还有待提高。 在回顾三维激光扫描发展历史的基础上,本文分析总结了三维激光扫描硬件装备、三维点云数据处理以及工程化实践方面取得的成就和面临的挑战,最后展望三维激光扫描与点云处理的发展趋势。 1 三维激光扫描硬件系统的现状 近20多年来,国内外厂商在三维激光扫描硬件系统方面进行了各种努力和创新。表 1列举了目前以星/机/车/地为搭载平台的几类典型激光扫描硬件系统及其参数指标。从技术发展趋势来看,三维激光扫描正在从低精度(厘米级)获取向高精度(毫米级)获取,从几何与强度的采集走向几何与多/高光谱协同采集。相比国外,国内激光扫描硬件起步晚且仍有较大差距。此外,便携式/背包式/无人机为平台的轻小型三维激光扫描装备正蓬勃发展。例如:Riegl公司研制的集成VUX的低空无人旋翼机激光扫描系统,武汉大学测绘遥感信息工程国家重点实验室研制的低空无人直升机激光扫描系统Heli-Mapping,北京拓维思科技有限公司研制的“巡线鹰”等。随着SLAM(simultaneous location and mapping)等技术的发展,三维激光扫描通过与机器人等平台集成,可实现自主测量[8]。 表 1各类平台激光扫描系统参数指标Tab. 1Parameters of laser scanning systems of various platforms 平台 激光扫描系统 波长/nm 最大测距 最大扫描频率 视场角 重量/kg 用途 卫星平台 ICESat/GLAS1 5321064 600 km 40 Hz — — 532 nm:云高、大气气溶胶测量;1064 nm:冰盖监测、全球森林生物量估算、陆地高程测量 ZY3-02[9] 1064 520 km 2 Hz — 40 地表高程控制点测量,辅助卫星影像无控立体测图 机载平台 Riegl2 VQ-1560i 1064 5800 m 1.33 MHz 58° 60 面向中小型区域陆地地形、植被、建筑物以及水下地形等三维数据获取 MiniVUX-1UAV 1064 250 m 0.1 MHz 360° 1.55 Leica3(ALS80-UP) 1064 5000 m 1.0 MHz 72° — 532 Optech4(Titan) 1064 2000 m 0.9 MHz 60° 71 1550 北科天绘5(AP-3500) 1064 3500 m 0.6 MHz 70° 20 车载平台 Riegl (VMX-1HA) 1064 420 m 0.6 MHz 360° 28 获取道路及周边地物的三维数据 Leica (Pegasus) 1064 119 m 1.0 MHz 360° 13.5 Optech (Lynx HS-600) 1064 130 m 0.8 MHz 360° — 北科天绘(RA-0600) 1064 300 m 0.3 MHz 360° 15 海达数云6(HiScan-C Su 2) 1064 650 m 0.1 MHz 360° 25 地面站平台 Riegl (VZ-6000) 1064 6000 m 0.3 MHz H:360° V:60° 14.5 特定目标区域精细数据获取,但受遮挡影响严重 Leica(P40) 1064 270 m 1 MHz H:360° V:— — Optech(TLS-250) 1550 1600 m 0.5 MHz H:360° V:120° — 北科天绘(UA-1500) 1064 3600 m 0.6 MHz H:360° V:150° 10 海达数云(HS450) 1064 450 m 500 KHz H:360° V:100° 11 注:“—”代表生产商未公布相应参数 1 http://www.csr.utexas.edu/glas/ 2 http://www.riegl.com/ 3 http://digital-imaging.leica-geosystems.com/en/index.htm 4 http://www.teledyneoptech.com/ 5 http://www.isurestar.com/ 6 http://www.hi-cloud.com.cn/s 三维激光扫描系统的几何测量原理基本相同,通过激光发射点与目标之间的距离结合激光发射器的位置和姿态信息进行联合解算,得到目标区域的三维点云(x,y,z)。其中,距离的观测方式主要采用脉冲式测距。根据观测目标的几何结构不同,单条激光束可能有多个回波[10],准确分离和探测每个回波是距离观测的基础。对于多回波和全波形两种回波记录方式,其回波探测方法有所不同。多回波方式在数据获取过程中利用简单的回波探测方法(constant fraction discriminator,CFD)实时检测回波[11],但存在一些问题:算法对用户保密;算法过于简单,对复杂波形处理效果较差,容易造成部分回波漏提取。全波形方式则以一定间隔不断记录后向散射信号,并提供给用户进行后续波形处理,以得到回波的位置及形状参数,常用的处理方法有:高斯分解[12]、去卷积方法[13]等。 2 三维点云数据处理的重要进展 与传统的测量方式相比,三维激光扫描数据采集速度快、采样频率高等优势,导致点云数据具有高冗余、误差分布非线性、不完整等特点,给海量三维点云的智能化处理带来了极大的困难:① 多视角、多平台、多源的点云数据难以有效整合,限制了数据间的优势互补,导致复杂场景描述不完整;② 复杂对象模型结构和语义特征表达困难,模型可用性严重受限,极大地限制了复杂场景的准确感知与认知。近年来,国内外学者在点云处理理论以及数据质量改善、自动化融合、点云分类和目标提取、按需多层次表达等方法方面进行了深入研究,取得的主要进展如下。 2.1 广义点云模型理论方法 针对多源多平台点云数据的融合难、目标提取难和三维自适应表达难的严重缺陷,文献[14]提出了广义点云的科学概念与理论研究框架体系。广义点云是指汇集激光扫描、摄影测量、众源采集等多源多平台空间数据,通过清洗、配准与集成,实现从多角度、视相关到全方位、视无关,建立以点云为基础,基准统一,且数据、结构、功能为一体的复合模型(如图 1)。
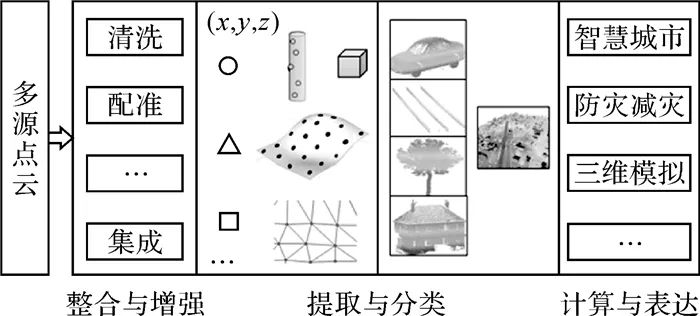 图 1 广义点云数据模型Fig. 1Ubiquitous point cloud model
图 1 广义点云数据模型Fig. 1Ubiquitous point cloud model
点云数据质量改善包括几何改正和强度校正。一方面,由于测距系统、环境及定位定姿等因素的影响,点云的几何位置存在误差,且其分布存在不确定性。利用标定场、已知控制点进行点云几何位置改正,能够提高扫描点云的位置精度和可用性。另一方面,激光点云的反射强度一定程度上反映了地物的物理特性,对于地物的精细分类起到关键支撑作用,然而点云的反射强度不仅与地物表面的物理特性有关,还受到扫描距离、入射角度等因素的影响。因此,需要建立点云强度校正模型进行校正,以修正激光入射角度、地物距离激光扫描仪的距离等因素对点云反射强度的影响[10, 15]。 2.3 多源、多平台三维点云融合 由于单一视角、单一平台的观测范围有限且空间基准不一致,为了获取目标区域全方位的空间信息,不仅需要进行站间/条带间的点云融合,还需要进行多平台(如机载、车载、地面站等)的点云融合,以弥补单一视角、单一平台带来的数据缺失,实现大范围场景完整、精细的数字现实描述[16-18]。此外,由于激光点云及其强度信息对目标的刻画能力有限,需要将激光点云和影像数据进行融合,使得点云不仅有高精度的三维坐标信息,也具有了更加丰富的光谱信息[19-20]。 不同数据(如不同站点/条带的激光点云、不同平台激光点云、激光点云与影像)之间的融合,需要同名特征进行关联。针对传统人工配准法效率低、成本高的缺陷,国内外学者研究基于几何或纹理特征相关性的统计分析方法[21-22],但是由于不同平台、不同传感器数据之间的成像机理、维数、尺度、精度、视角等各有不同,其普适性和稳健性还存在问题,还需要突破以下瓶颈:鲁棒、区分性强的同名特征提取,全局优化配准模型的建立及抗差求解。 2.4 三维点云的精细分类与目标提取 三维点云的精细分类是从杂乱无序的点云中识别与提取人工与自然地物要素的过程[4, 23-26],是数字地面模型生成、复杂场景三维重建等后续应用的基础。然而,不同平台激光点云分类关注的主题有所不同。机载激光点云分类主要关注大范围地面、建筑物顶面、植被、道路等目标[3-4, 23, 27-29],车载激光点云分类关注道路及两侧道路设施、植被、建筑物立面等目标[25, 30-32],而地面站激光点云分类则侧重特定目标区域的精细化解译[33]。其中,点云场景存在目标多样、形态结构复杂、目标遮挡和重叠以及空间密度差别迥异等现象,是三维点云自动精细分类的共同难题。据此,国内外许多学者进行了深入研究并取得了一定的进展,在特征计算基础上,利用逐点分类方法[34-35]或分割聚类分类方法[25, 30-31]对点云标识,并对目标进行提取。但是由于特征描述能力不足,分类和目标提取质量无法满足应用需求,极大地限制了三维点云的使用价值。目前,模拟人脑的深度学习方法突破了传统分类方法中过度依赖人工定义特征的困难,已在二维场景分类解译方面表现出极大潜力[36],但是在三维点云场景的精细分类方面,还面临许多难题:海量三维数据集样本库的建立,适用于三维结构特征学习的神经网络模型的构建及其在大场景三维数据解译中的应用。综上,顾及目标及其结构的语义理解,三维目标多尺度全局与局部特征的学习,先验知识或第三方辅助数据引导下的多目标分类与提取方法,是未来的重要研究方向。 2.5 三维场景的按需多层次表达 在大范围点云场景分类和目标提取后,目标点云依然离散无序且高度冗余,不能显式地表达目标结构以及结构之间的空间拓扑关系,难以有效满足三维场景的应用需求。因此,需要通过场景三维表达,将离散无序的点云转换成具有拓扑关系的几何基元组合模型,常用的有数据驱动和模型驱动两类方法[5-6],其中存在的主要问题和挑战包括:三维模型的自动修复,以克服局部数据缺失对模型不完整的影响[37];形状、结构复杂地物目标的自动化稳健重构;从可视化为主的三维重建发展到可计算分析为核心的三维重建,以提高结果的可用性和好用性。此外,不同的应用主题对场景内不同类型目标的细节层次要求不同[38],场景三维表达需要加强各类三维目标自适应的多尺度三维重建方法[23, 39-40],建立语义与结构正确映射的场景—目标—要素多级表达模型。 2.6 典型行业和重大工程应用 三维激光扫描已在许多重大工程和典型领域里得到了广泛的应用。从深空到地球表面,从全球范围制图到小区域监测,从基础科学研究到大众服务,三维激光扫描都展现出了与众不同的优势。 2.6.1 深空探测 深空探测的目的是促进人类对月球以及更远天体的科学认识,而距离测量是其中的关键技术,许多国家采用激光测高仪进行星体地形表面的测量,如1971年美国阿波罗-15首次进行的月球形状测量等[41]。 2.6.2 地球科学应用研究 数字地面模型是各种地学过程研究的基础,利用三维激光扫描系统观测地表形态及其变化,已被广泛用于各类地学应用,例如:全球冰川物质平衡[42-43],地质灾害区域时空变化监测[44-45],海岸线提取和海岸侵蚀监测[46-47],海底测绘及水下目标探测[48]等。 2.6.3 森林资源调查 及时准确了解林区的植被动态变化是林业科学研究的基础。相比光学遥感,激光雷达能够获取植被冠层的三维结构:地面激光雷达用于精细地获取单株树木的垂直结构[7],机载激光雷达用于大范围森林的蓄积量和生物量等生态参数的反演[49-51],星载激光雷达还可以进行全球植被覆盖及其生态参数制图[52-53]。 2.6.4 城市形态分析 城市形态分析对城市规划设计与管理具有重要意义,传统手段难以监测城市形态的垂直结构及其演化,激光雷达可以快速获取城市三维形态,为更精细的城市形态分析提供基础,满足基于城市形态的各种应用需求,如基础设施管理、太阳能潜力估计等[54-55]。 2.6.5 无人驾驶高精度地图 高精度地图是实现自动化驾驶的关键因素[25],车载三维激光扫描系统可以高效、快速的获得道路以及周边高精度、高密度的三维几何信息和纹理信息,为高精度地图的自动化生产提供高质量的数据支撑[56]。 2.6.6 电力走廊安全巡检 我国电力资源分布和经济建设中心不一致,高压输电线路区域地理环境复杂,传统的人工巡检手段难以适应。机载三维激光扫描可以直接获取电力线及其附属设备的几何形态参数[57],为电力巡检提供了新的手段[58]。 2.6.7 海岛礁测绘 精确的海岛礁基础地理空间信息是海洋管理、经济开发、海防安全的重要依据,传统测绘手段作业周期长、成本高,三维激光扫描可以直接观测目标的三维空间信息,直接生产数字测绘产品,是岛礁高精度测图的重要手段。 2.6.8 文化遗产数字化保护 文化遗产数字化保护是人类共同的历史责任。三维激光扫描可以快速绘制物质文化遗产的结构图和精细的三维模型,大幅提高文化遗产保护的工作效率,并丰富文化遗产成果表现形式[59-60]。 3 点云处理面临的挑战 近年来,星、空、地扫描以及便携式泛在传感器(如:RGB-D深度相机)广泛运用,不但提高了点云获取的时效性、颗粒度和覆盖面,而且带来了点云的多时相、流形(streaming)和多样属性的新特性,从而产生了多维点云数据。多维点云本质上是对物理世界中地理对象/现象的三维几何、物理乃至生化特性的多维密集采样,其不但记录了地物的三维空间结构特征,同时也记录了地物目标的物理特性(如波形、反射强度等)。深入挖掘多维点云的内在特征对提升多维点云处理的智能化程度,揭示复杂动态三维场景的变化规律至关重要。尽管点云处理方面已经取得了较好的研究成果,但是多维点云的智能化处理方面仍然面临如下的巨大挑战: 3.1 多维点云几何与属性协同的尺度转换 探索不同平台获取点云的误差分布规律,建立比例尺依赖的特征点质量评估模型;研究融合点云物理特性的特征点簇聚合与分层方法;建立基于特征分层的多维点云多尺度整合方法,实现多维点云的时空基准自动统一。 3.2 多维点云变化发现与分类 建立统一时空参考框架下多维点云的变化发现与提取方法,研究基于时间窗口的多维点云与地物三维模型的关联方法,提取地物空间要素的几何和属性变化,研究面向地物空间结构变化的可视化分析方法,为揭示空间要素的变化规律提供科学工具。 3.3 复杂三维动态场景的精准理解 基于机器学习、人工智能等先进理论方法探索多维点云结构化建模与分析的理论与方法,研究建立复杂三维动态场景中多态目标的准确定位、分类以及语义化模型的建立,建立面向多维点云的三维动态场景中各类要素的特征描述、分类与建模方法,架设多维点云与地理计算模型的桥梁。 上述关键挑战问题的突破将形成完备的广义点云全三维(覆盖全、要素全、关系全)建模的理论与方法体系,从而实现点云处理由“静态、可视、量算”到“动态、模拟、分析”的跨越。 4 三维激光扫描与点云处理发展趋势与展望 近年来,传感器、通信和定位定姿技术的发展,人工智能、深度学习、虚拟/增强现实等领域先进技术的重要进展有力推动了数字现实(digital reality)时代的来临。激光扫描与点云智能化处理将顺应数字现实时代的需求朝以下几个方面发展。 (1) 三维激光扫描装备将由现在的单波形、多波形走向单光子乃至量子雷达,在数据的采集方面由现在已几何数据为主走向几何、物理,乃至生化特性的集成化采集。 (2) 三维激光扫描的搭载平台也将以单一平台为主转变为以多源化、众包式为主的空地柔性平台,从而对目标进行全方位数据获取,当前国家重点研发计划重点专项项目:国产空地全息三维遥感系统及产业化(编号:2016YFF0103500) 已支持相关研究。 (3) 点云的特征描述、语义理解、关系表达、目标语义模型、多维可视化等关键问题将在人工智能、深度学习等先进技术的驱动下朝着自动化、智能化的方向快速发展,点云将成为测绘地理信息中继传统矢量模型、栅格模型之后的一类新型模型,将有力提升地物目标认知与提取自动化程度和知识化服务的能力。 (4) 虚拟/增强现实、互/物联网+的发展将促使三维激光扫描产品由专业化应用扩展到大众化、消费级应用,满足网络化多维动态地理信息服务的需求。 【引文格式】杨必胜,梁福逊,黄荣刚。三维激光扫描点云数据处理研究进展、挑战与趋势[J]. 测绘学报,2017,46(10):1509-1516. DOI: 10.11947/j.AGCS.2017.20170351 美图| 2017中国版最美地图返回搜狐,查看更多 |
【本文地址】
今日新闻 |
推荐新闻 |