PID等几种常见温度控制算法 |
您所在的位置:网站首页 › wpf22g温控器参数 › PID等几种常见温度控制算法 |
PID等几种常见温度控制算法
|
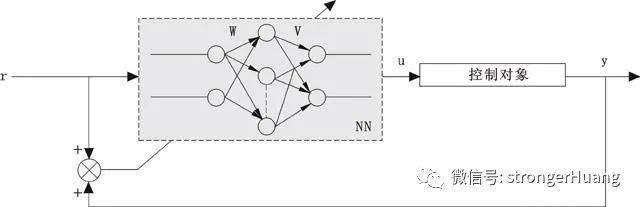
图3 神经网络控制系统的原理框图 4.Fuzzy-PID控制 模糊控制不需知道被控对象的精确模型,易于控制不确定对象和非线性对象。 PID本质是线性控制 。将模糊控制与PID结合多,以Fuzzy-PID混合控制为例,据给定值与测量值之偏差e选择智能控制器,根据e的变化选择控制方法,当|e|≤emin或|e|≥emax时,采用PID控制;当emin≤|e|≤emax时,采用Fuzzy控制。其结构框图如图4。 图4 Fuzzy-PID混合控制结构框图 5.神经网络PID控制 在PID控制的基础上,加入神经网络控制器,构成神经网络PID控制器,如图5。神经网络控制器NNC是前馈控制器,通过对PID控制器的输出进行学习,在线调整自己,目标是使反馈误差e(t) 或u(t)趋近于零,使自己逐渐在控制中占据主导地位,以减弱或最终消除反馈控制器的作用。晖仪表YR-GAD系列人工智能调节器/温控仪使用的就是神经网络PID控制控制算法。 图5 神经网络PID控制结构框图 6.模糊神经网络控制 将模糊逻辑与神经网络结合,采用神经网络模糊逻辑推理网络模型和快速的自学习算法,通过网络的离线训练和在线自学习使控制器具有自调整、自学习和自适应能力,达到模糊智能控制。如图6。 图6 模糊神经网络控制系统结构图 7.遗传PID控制 遗传PID控制是将控制器参数构成基因型,将性能指标构成相应的适应度,利用遗传算法来整定控制器的最佳参数,不要求系统是否为连续可调,能否以显式表示。基于遗传算法的自适应PID控制的原理框图如7。 遗传PID温控系统将测量值与给定值进行比较,用遗传算法来优化PID参数,然后将控制量输出,实现将PID参数串接构成完整染色体,从而构成遗传空间中的个体,过通过繁殖交叉和变异遗传操作生成新一代群体,经过多次搜索获得最大适应度值的个体。 图7 基于遗传算法的自适应PID控制结构图 8.广义预测控制 预测控制(Predictive Control)是基于模型的计算机控制算法。其预测模型有脉冲响应模型、阶跃响应模型、CAMRMA模型和CARIMA模型。基于CARIMA模型的广义预测控制(GPC)是一种新型计算机控制算法。 嵌入式专栏 3 常见温度控制方法的对比分析 通过上述温度控制方法的原理分析,下表给出各种温度控制特性与应用场合的情况。 温控仪控制算法 控制算法的控制特性 温控仪应用场合 单一控制 常规PID拄制 优点:结构简单、实用,性价比高。缺点:鲁棒性不强;适应性不快;协调性不够好等 易于建立的线性温度控制系统的被控对象模型 模糊控制 与传统的PID控制相比,响应快,超调量小,鲁棒性强 纯滞后,参数时变或非线性的温度控制系统,如干燥机、工业炉等的温度控制 神经网络控制 鲁棒性强,响应速度快,抗干扰能力强,算法简单,易于用硬件和软件实现 多变量、多参数、非线性与时变系统如:电阻炉的温度控制等 复合控制 Fuzzy-PID控制 具有很强的适应性,只要知道部分知识即可建立BP算法 一些大滞后系统中自动寻优P、I、D参数,如管式加热炉的温度控制 模糊神经网络控制 动态响应快,能达到高精度的快速控制,具有极强的鲁棒性和适应能力,稳定性好 需要不断修正控制参数的温度控制系统。如热电偶校验仪等控温装置 遗传PID控制 调试方便,控制精度高,抗干扰性强,较高的稳定性能 寻求全局最优且不需任何初始信息的P、I、D参数寻优温控系统中,如陀螺温控系统 自适应广义预测及控制 鲁棒性强,控制精度高 医用温度控制,如微波热疗中的 温度控制 模糊、神经网络 模糊控制鲁棒性强。动态响应与上升时间快,超调小,PID控制器的动态跟踪品质好和稳态精度高 具有较太的滞后性,非线性、时定性的温度控制系统,如高分子聚合 物反应温度控制等 模糊、神经网络和遗传控制 实现温度随外界干扰条件的乏化,实时的调节网络和控制规律的功能,具有良好的温度跟踪性能和抗干扰能力 对升温速度和恒温过程的精度要求较高的控制系统,如淬此炉温度控制等 将线性与非线性控制相结合。使温度能满足用户的精度要求是温控系统的最终目的。 在实际应用中,根据具体的应用场合、不同的加热对象、不同的控制要求和控制精度,选择不同的控制方式。 来源: http://blog.sina.com.cn/s/blog_c687c00e0102w5oz.html 来源: http://blog.sina.com.cn/s/blog_c687c00e0102w5oz.html 编排 | strongerHuang 微信公众号 | 嵌入式专栏 - END - 关注@面包板社区 学习更多机器人、电子电气、电路、嵌入式技术 STM32自平衡机器人设计(代码、电路图) 机械臂上多个伺服独立操控的实现 扫地机器人系统的解决方案 PID控制算法如何通过C语言和梯形图实现? 一文看懂编程中的基本数据结构与算法思想 初学者宝典:C语言入门基础知识大全 一道有趣的C语言算法题 返回搜狐,查看更多 |
【本文地址】
今日新闻 |
推荐新闻 |