玩转ROS2系列01 |
您所在的位置:网站首页 › word哪个版本最稳定 › 玩转ROS2系列01 |
玩转ROS2系列01
|
玩转ROS2系列:
玩转ROS2系列01–Ubuntu下ROS 2 版本选择和安装 玩转ROS2系列02–创建一个工作空间并编译功能包 玩转ROS2系列03–创建并运行一个你自己的功能包 玩转ROS2系列04–在功能包中实现一个订阅节点和发布节点 1.我的安装环境首先说下我的环境vmware player14 + UbuntU18.04(x64) 这里为了保证系统的纯净我重新安装了一个Ubuntu1804的虚拟机。 2.ROS的版本选择安装参考ROS2的官方文档主页下的ROS2安装教程 ROS2的版本代号命名规则还是遵循了ROS1中版本代号的规则(实际上也是 Ubuntu 版本的命名规则),由两个单词组成,单词首字母从A-Z依次递增,X… X…格式,这里还有一个ROS的传统小彩蛋,就是第二个单词是一种龟类生物的名称。 ROS2按照半年发布一个版本的节奏,目前已经发布到了第五个版本了,这里安装页面目前有Dashing 和Eloquent 两个版本可选,我选择了Dashing 版本,也就是ROS2的第四个正式版 安装前先将软件源换位国内的源,这样安装ROS2中安装软件包速度会快很多,这里选择阿里的源 运行一下Demo,在两个终端分别打开talker和listener ros2 run demo_nodes_cpp talker ros2 run demo_nodes_py listener两个节点之间可以正常传递话题,打开rqt_graph工具查看一下节点和话题和输出一下话题列表 rqt_graph ros2 topic list这里可以看到,和ROS1有几个显著的不同 1.使用ROS2run启动节点前没有使用roscore来启动master节点 2.在ROS2中master节点已经不复存在了 3.相比于ROS1,部分操作指令有变化,例如rosrun和ros2 run,但是有一些又继续传承下来,例如rqt_graph 哈哈,第一次准备写一个系列的文章,也是给自己开一个新的坑,欢迎大家催更。 安装过程B站视频:玩转ROS2系列01–ROS2安装初体验 |
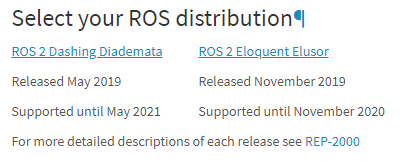 至于原因,主要有两个 第一是作为学习入门,最新的版本未必是最合适的,可参考的资料会相对较少,次新的版本可能更有优势。 第二是Dashing 版本是目前发布的5个正式版本中唯一一个“长期”支持版本,这里长期是相对其他四个发布版本而言,Dashing 支持周期为2年,其他版本都是1年,没错,Dashing 的支持周期结束时间比Eloquent 还要晚半年。
至于原因,主要有两个 第一是作为学习入门,最新的版本未必是最合适的,可参考的资料会相对较少,次新的版本可能更有优势。 第二是Dashing 版本是目前发布的5个正式版本中唯一一个“长期”支持版本,这里长期是相对其他四个发布版本而言,Dashing 支持周期为2年,其他版本都是1年,没错,Dashing 的支持周期结束时间比Eloquent 还要晚半年。 Ubuntu下的安装的指令这里就不搬运官网的内容了,主要原因是安装中用到的keys或者引用的网络资源可能会更新,而这篇博客可能不会更新,如果这里我按照目前的指令照搬过来未来某一天有谁按照这篇博客的内容去安装就有可能翻车(至少ROS1下帮助过好几个因为keys更新的原因翻车的小萌新),所以直接放上页面链接Installing ROS 2 via Debian Packages 按照官网的方法,一路安装到Environment setup部分,这里加载环境变量我的操作和官网的稍有不同,我是将环境变量直接写入到.bashrc中(我使用的是bash),这样就不用每次打开一个新的终端都需要重新source一下。
Ubuntu下的安装的指令这里就不搬运官网的内容了,主要原因是安装中用到的keys或者引用的网络资源可能会更新,而这篇博客可能不会更新,如果这里我按照目前的指令照搬过来未来某一天有谁按照这篇博客的内容去安装就有可能翻车(至少ROS1下帮助过好几个因为keys更新的原因翻车的小萌新),所以直接放上页面链接Installing ROS 2 via Debian Packages 按照官网的方法,一路安装到Environment setup部分,这里加载环境变量我的操作和官网的稍有不同,我是将环境变量直接写入到.bashrc中(我使用的是bash),这样就不用每次打开一个新的终端都需要重新source一下。 官方安装页面上的内容我就尝试到了Try some examples段落为止,之后两个章节,后面的"Install additional RMW implementations"和“Install additional packages using ROS 1 packages”两部分还没有尝试,主要是因为DDS我目前还没有开始研究,所以暂时没有打算切换默认版本,至于ros1-bridge,我目前计划是抛开ROS1,完整的体验原汁原味的ROS2,所以自然也不会去安装了。 最后记录一下ROS2的卸载方法,以备哪天想出坑的时候使用
官方安装页面上的内容我就尝试到了Try some examples段落为止,之后两个章节,后面的"Install additional RMW implementations"和“Install additional packages using ROS 1 packages”两部分还没有尝试,主要是因为DDS我目前还没有开始研究,所以暂时没有打算切换默认版本,至于ros1-bridge,我目前计划是抛开ROS1,完整的体验原汁原味的ROS2,所以自然也不会去安装了。 最后记录一下ROS2的卸载方法,以备哪天想出坑的时候使用【本文地址】
今日新闻 |
推荐新闻 |