【极海APM32替代笔记】HAL库中的SPI传输(可利用中断或DMA进行连续传输) |
您所在的位置:网站首页 › sgpicsnet › 【极海APM32替代笔记】HAL库中的SPI传输(可利用中断或DMA进行连续传输) |
【极海APM32替代笔记】HAL库中的SPI传输(可利用中断或DMA进行连续传输)
|
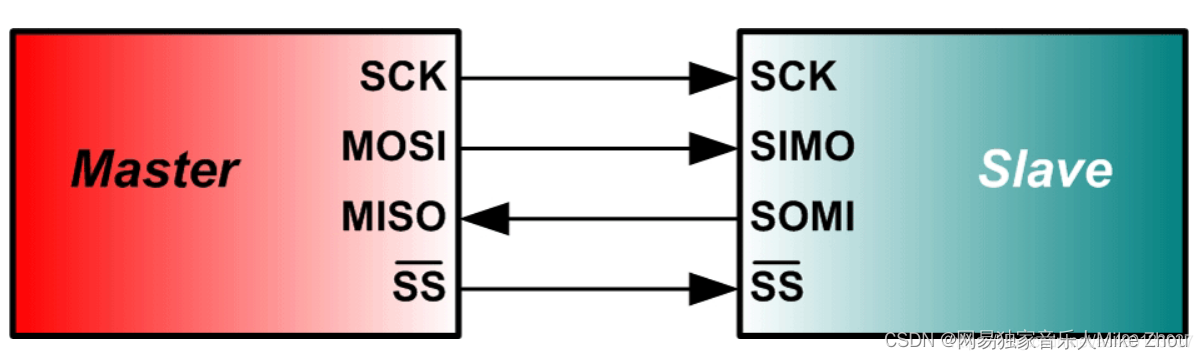
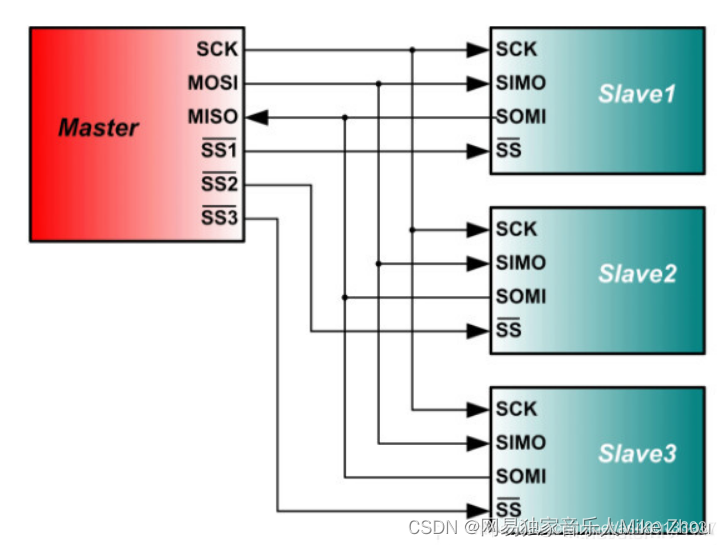
【极海APM32替代笔记】HAL库中的SPI传输(可利用中断或DMA进行连续传输) SPI 是英语Serial Peripheral interface的缩写,顾名思义就是串行外围设备接口。是Motorola(摩托罗拉)首先在其MC68HCXX系列处理器上定义的。 SPI,是一种高速的,全双工,同步的通信总线,并且在芯片的管脚上只占用四根线,节约了芯片的管脚,同时为PCB的布局上节省空间,提供方便,主要应用在 EEPROM,FLASH,实时时钟,AD转换器,还有数字信号处理器和数字信号解码器之间。 SPI主从模式SPI分为主、从两种模式,一个SPI通讯系统需要包含一个(且只能是一个)主设备,一个或多个从设备。提供时钟的为主设备(Master),接收时钟的设备为从设备(Slave),SPI接口的读写操作,都是由主设备发起。当存在多个从设备时,通过各自的片选信号进行管理。 SPI是全双工且SPI没有定义速度限制,一般的实现通常能达到甚至超过10 Mbps SPI信号线SPI接口一般使用四条信号线通信: SDI(数据输入),SDO(数据输出),SCK(时钟),CS(片选) MISO: 主设备输入/从设备输出引脚。该引脚在从模式下发送数据,在主模式下接收数据。 MOSI: 主设备输出/从设备输入引脚。该引脚在主模式下发送数据,在从模式下接收数据。 SCLK:串行时钟信号,由主设备产生。 CS/SS:从设备片选信号,由主设备控制。它的功能是用来作为“片选引脚”,也就是选择指定的从设备,让主设备可以单独地与特定从设备通讯,避免数据线上的冲突。 硬件上为4根线。 四线SPI可以同时发送和接收数据 另外,还有一种三线SPI,即SCLK、CS、DIO,通过DIO一条线实现MISO和MOSI的功能,三线SPI同时发送或接收 SPI协议可以一对多传输 拉低哪个CS就同哪个芯片通信 根据时钟极性(CPOL)及相位(CPHA)不同,SPI有四种工作模式。 时钟极性(CPOL)定义了时钟空闲状态电平: CPOL=0为时钟空闲时为低电平 CPOL=1为时钟空闲时为高电平 时钟相位(CPHA)定义数据的采集时间。 CPHA=0:在时钟的第一个跳变沿(上升沿或下降沿)进行数据采样。 CPHA=1:在时钟的第二个跳变沿(上升沿或下降沿)进行数据采样。
CRC根据设备需求来 NSS片选这里选择的是软件片选(GPIO设置为输出,由GPIO控制拉高拉低) 之所以推荐这个配置 后面会详细说明 CPOL和CPHA根据芯片来定 工作模式选择全双工 有主机模式全双工/半双工 从机模式全双工/半双工 只接收主机模式/只接收从机模式 只发送主机模式 SPI函数在stm32f1xx_hal_spi.h头文件中可以看到spi的操作函数。分别对应轮询,中断和DMA三种控制方式。 利用SPI接口发送和接收数据主要调用以下两个函数: HAL_StatusTypeDef HAL_SPI_Transmit(SPI_HandleTypeDef *hspi, uint8_t *pData, uint16_t Size, uint32_t Timeout);//发送数据 HAL_StatusTypeDef HAL_SPI_Receive(SPI_HandleTypeDef *hspi, uint8_t *pData, uint16_t Size, uint32_t Timeout);//接收数据SPI发送数据函数: HAL_SPI_Transmit(SPI_HandleTypeDef *hspi, uint8_t *pData, uint16_t Size, uint32_t Timeout);//发送数据参数: *hspi: 选择SPI1/2,比如&hspi1,&hspi2 *pData : 需要发送的数据,可以为数组 Size: 发送数据的字节数,1 就是发送一个字节数据 Timeout: 超时时间,就是执行发送函数最长的时间,超过该时间自动退出发送函数 SPI接收数据函数: HAL_SPI_Receive(SPI_HandleTypeDef *hspi, uint8_t *pData, uint16_t Size, uint32_t Timeout);//接收数据参数: *hspi: 选择SPI1/2,比如&hspi1,&hspi2 *pData : 接收发送过来的数据的数组 Size: 接收数据的字节数,1 就是接收一个字节数据 Timeout: 超时时间,就是执行接收函数最长的时间,超过该时间自动退出接收函数 SPI接收回调函数: HAL_SPI_TransmitReceive_IT(&hspi1, TXbuf,RXbuf,CommSize);当SPI上接收出现了 CommSize个字节的数据后,中断函数会调用SPI回调函数: HAL_SPI_TxRxCpltCallback(SPI_HandleTypeDef *hspi)用户可以重新定义回调函数,编写预定功能即可,在接收完成之后便会进入回调函数 另外,最常用又最方便的是: HAL_SPI_TransmitReceive(SPI_HandleTypeDef *hspi, uint8_t *pTxData, uint8_t *pRxData, uint16_t Size,uint32_t Timeout)此函数可以同时发送和接收 比如发送2个字节而后又接收3个字节,则Size=5(实际上发送5个字节,在发送2个字节后,开始接收3个字节) 若要发送2个字节的同时接收2个字节,则Size=2 若要发送2个字节,但在发送1个字节后接收一个字节,则Size=2 在这里 发送和接收同时进行,根据需求 Size填入的值为时序的总长度 SPI连续传输在HAL库中,SPI的传输是不连续的 若是选择硬件NSS,则每次发送一个字节后,NSS都会拉高 所以我们选择软件NSS,这样就可以在完成传输后手动拉高 另外,若CPHA设置为1edge,则默认开启NSSP,在每次传输1个字节后,都会有一段空闲,设置为2或关闭NSSP则没有 如图: 由于这两个函数为非阻塞 固在使用时要加上阻塞判断 HAL_SPI_TransmitReceive_IT(hspi,pData,buf,x+y); while(hspi->State!=HAL_SPI_STATE_READY); Set_SPI_CS(hspi,GPIO_PIN_SET);若不加 软件片选会变成这样: SPI函数包装如下: /*! * @brief 对SPI设备进行发送和读取 * * @param [in] hspi: SPI_HandleTypeDef 变量地址 * [in] pData: 需要发送的数据变量地址 * [in] x: 发送数据个数 * [in] y: 读取数据个数,最大为4,若大于4,则返回0 * [in] us: 拉高CS后的延时时长 * [in] sync_flag: 同步标志 * 当sync_flag为true时,发送数据和读取数据同时进行,片选始终拉低,接收的数据为发送x个数据以后接收的y个数据 * 当sync_flag为false时,发送数据和读取数据分别进行,片选分两次拉低,接收的数据为第二次片选拉低时的数据 * * @return dat: SPI读取数据返回 */ uint32_t SPI_Send_x_Read_y(SPI_HandleTypeDef *hspi, uint8_t *pData, uint8_t x,uint8_t y,uint8_t us,bool sync_flag) { Set_SPI_CS(hspi,GPIO_PIN_SET); uint8_t buf[x+y]; memset(buf,0,sizeof(buf)); uint32_t dat=0; if(y>4 || x+y==0) { return 0; } if(sync_flag) { Set_SPI_CS(hspi,GPIO_PIN_RESET); if(pData!=NULL) { HAL_SPI_TransmitReceive_IT(hspi,pData,buf,x+y); while(hspi->State!=HAL_SPI_STATE_READY); Set_SPI_CS(hspi,GPIO_PIN_SET); delay_us(us); } else { Set_SPI_CS(hspi,GPIO_PIN_SET); delay_us(us); return 0; } } else { if(pData!=NULL && x!=0) { Set_SPI_CS(hspi,GPIO_PIN_RESET); HAL_SPI_Transmit_IT(hspi,pData,x); while(hspi->State!=HAL_SPI_STATE_READY); Set_SPI_CS(hspi,GPIO_PIN_SET); delay_us(us); } Set_SPI_CS(hspi,GPIO_PIN_RESET); HAL_SPI_Receive_IT(hspi,buf,y); while(hspi->State!=HAL_SPI_STATE_READY); Set_SPI_CS(hspi,GPIO_PIN_SET); delay_us(us); x=0; } for(uint8_t i=0;i Set_SPI_CS(hspi,GPIO_PIN_SET); if (hspi == (&hspi2)) { } } |

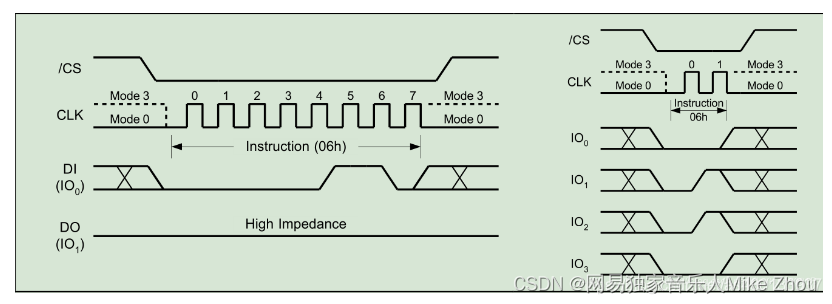 传输一个字节
传输一个字节 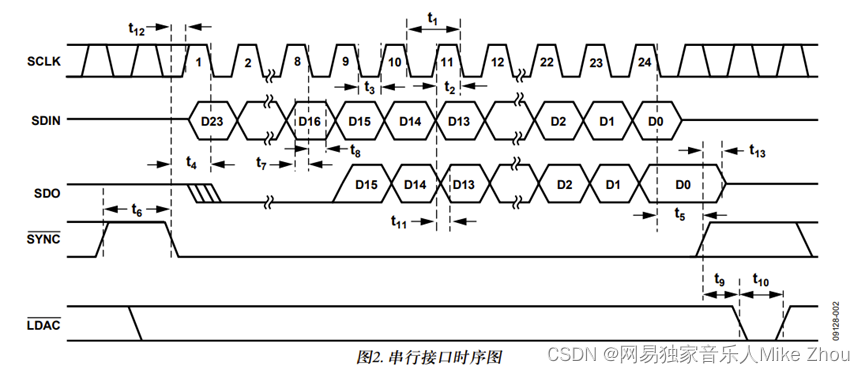 如图为传输一个24位的数据 在此期间片选SYNC一直为拉低的
如图为传输一个24位的数据 在此期间片选SYNC一直为拉低的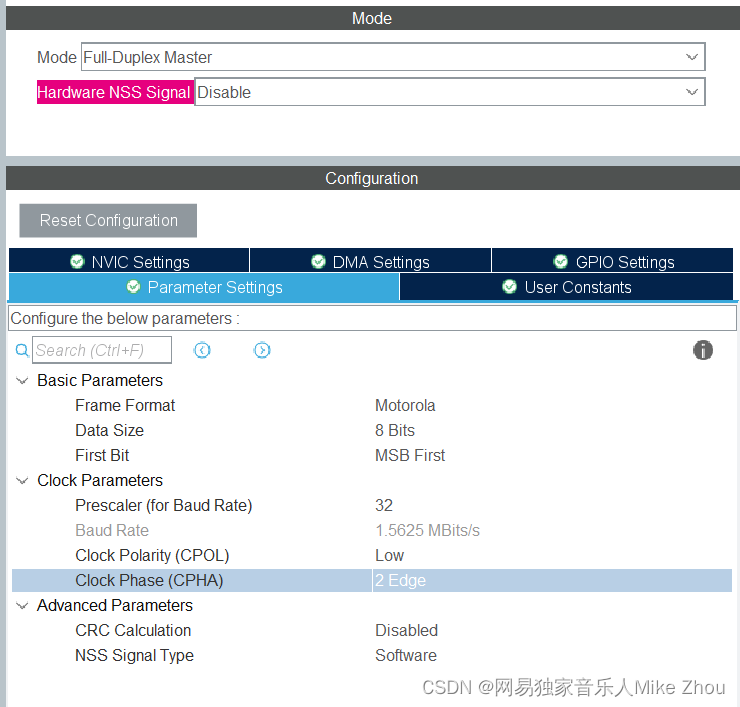 这是一般情况的配置 SPI配置中设置数据长度为8bit,MSB先输出分频为64分频,则波特率为125KBits/s。其他为默认设置。 Motorla格式,CPOL设置为Low,CPHA设置为第二个边沿。不开启CRC检验,NSS为软件控制。 (CPOL=0,CPHA=1)
这是一般情况的配置 SPI配置中设置数据长度为8bit,MSB先输出分频为64分频,则波特率为125KBits/s。其他为默认设置。 Motorla格式,CPOL设置为Low,CPHA设置为第二个边沿。不开启CRC检验,NSS为软件控制。 (CPOL=0,CPHA=1)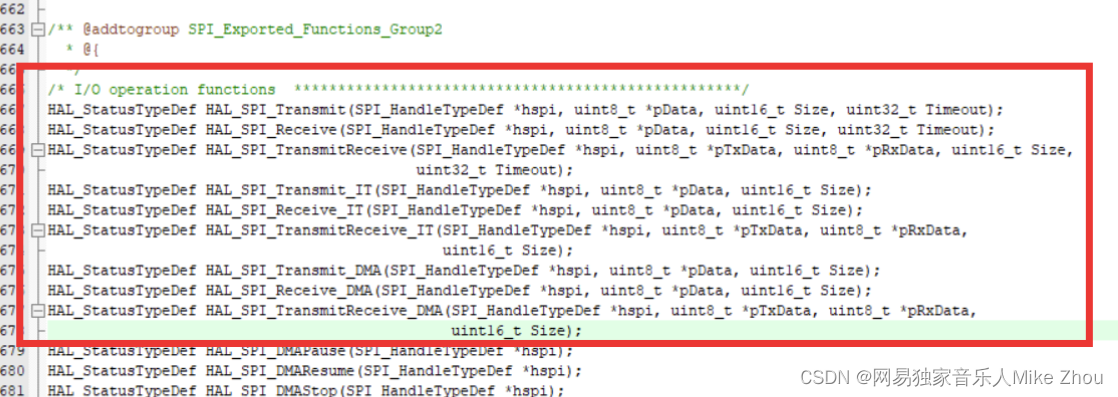 轮询: 最基本的发送接收函数,就是正常的发送数据和接收数据(阻塞) 中断: 在SPI发送或者接收完成的时候,会进入SPI回调函数,用户可以编写回调函数,实现设定功能(非阻塞) DMA: DMA传输SPI数据(非阻塞)
轮询: 最基本的发送接收函数,就是正常的发送数据和接收数据(阻塞) 中断: 在SPI发送或者接收完成的时候,会进入SPI回调函数,用户可以编写回调函数,实现设定功能(非阻塞) DMA: DMA传输SPI数据(非阻塞)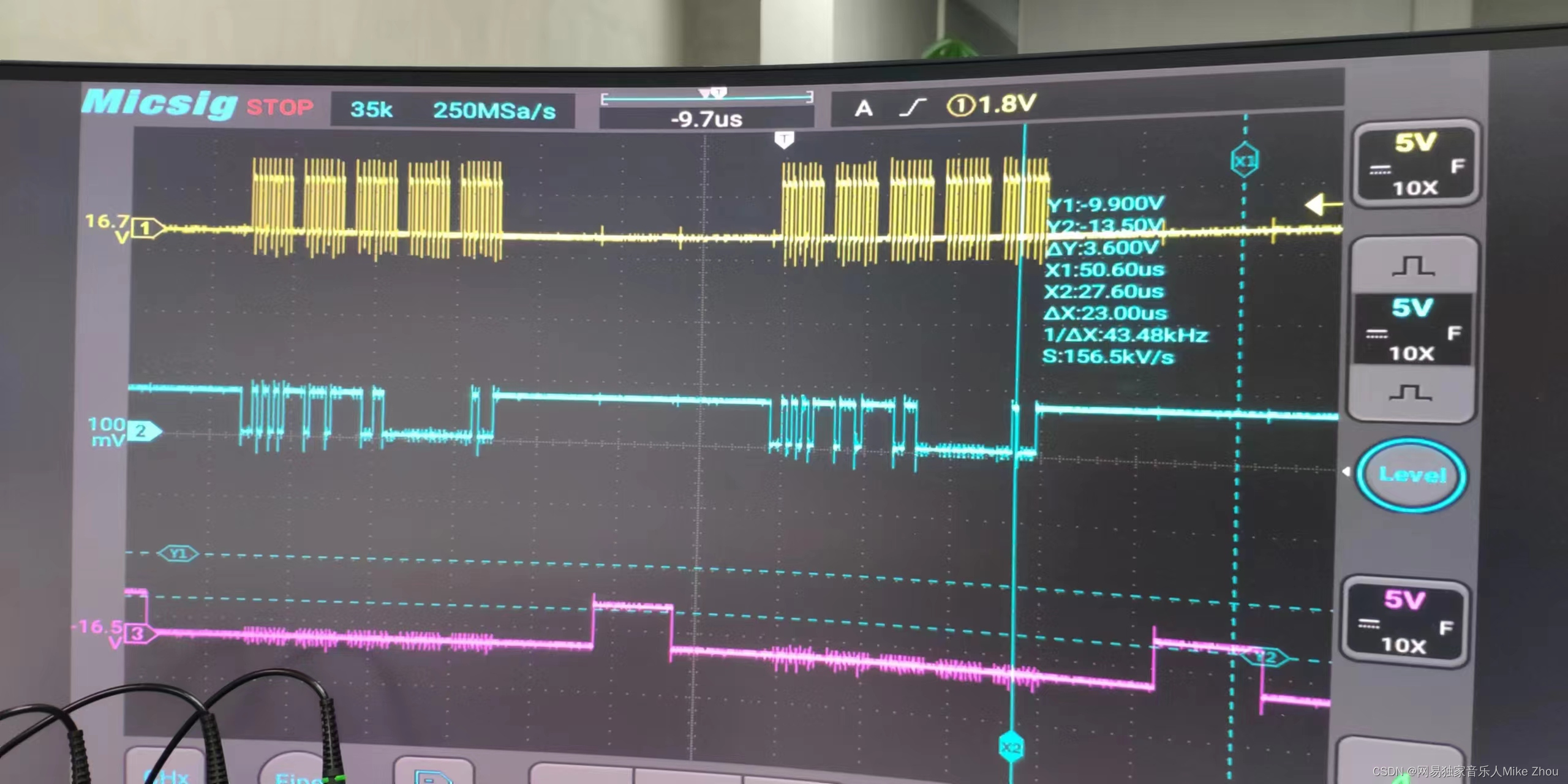 若是用阻塞的方式进行传输,则每传输完两个字节后会有一个空闲,如图:
若是用阻塞的方式进行传输,则每传输完两个字节后会有一个空闲,如图: 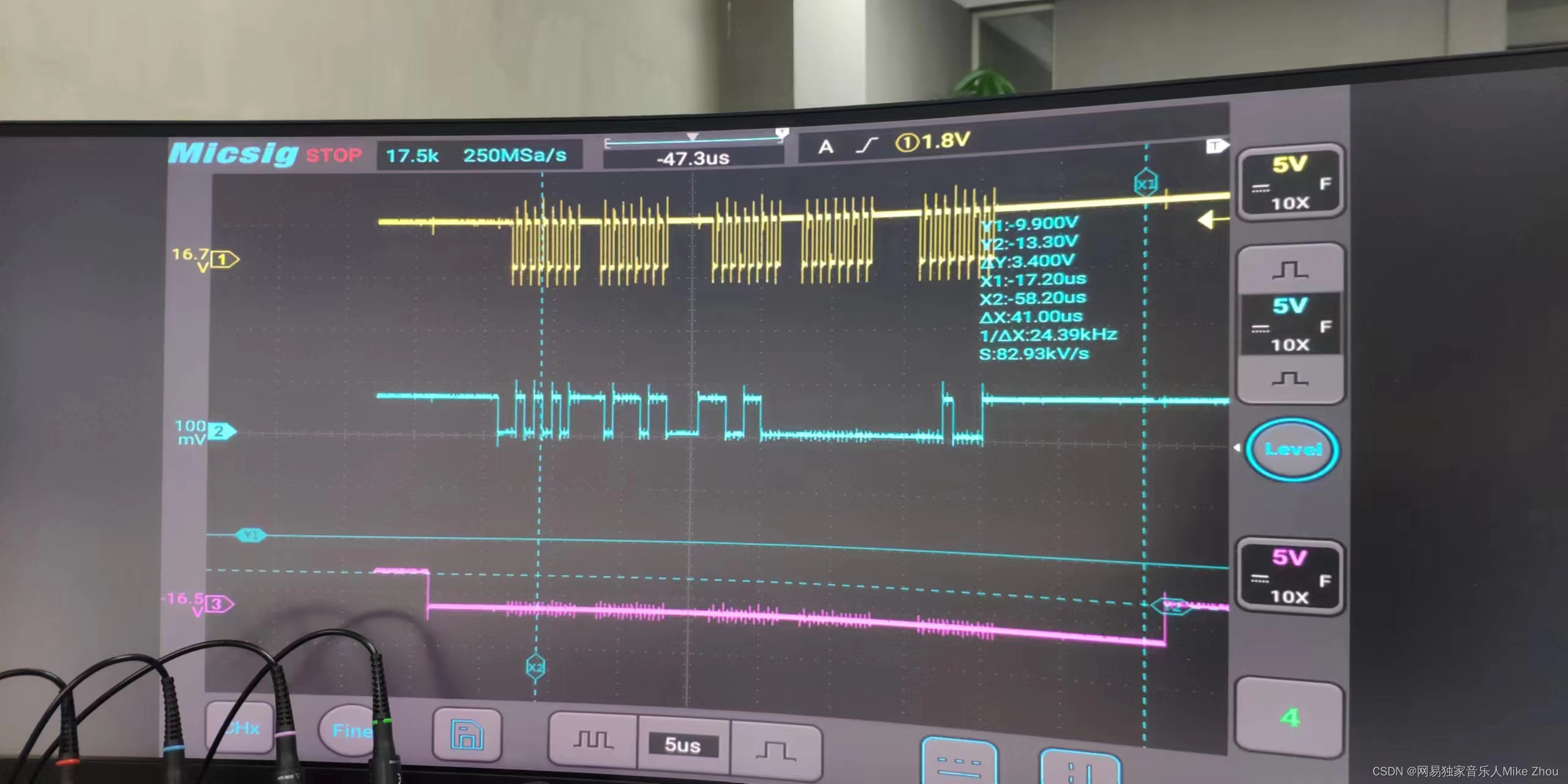 为了使每两个字节传输中不间隔(连续传输) 则使用HAL_SPI_TransmitReceive_IT或HAL_SPI_TransmitReceive_DMA 同时在cubemx中开启中断或DMA(普通模式,开启TX和RX) (其实说白了 DMA也算中断的一种 DMA不经过CPU传输 发送完成以后也会进入DMA中断回调函数)
为了使每两个字节传输中不间隔(连续传输) 则使用HAL_SPI_TransmitReceive_IT或HAL_SPI_TransmitReceive_DMA 同时在cubemx中开启中断或DMA(普通模式,开启TX和RX) (其实说白了 DMA也算中断的一种 DMA不经过CPU传输 发送完成以后也会进入DMA中断回调函数)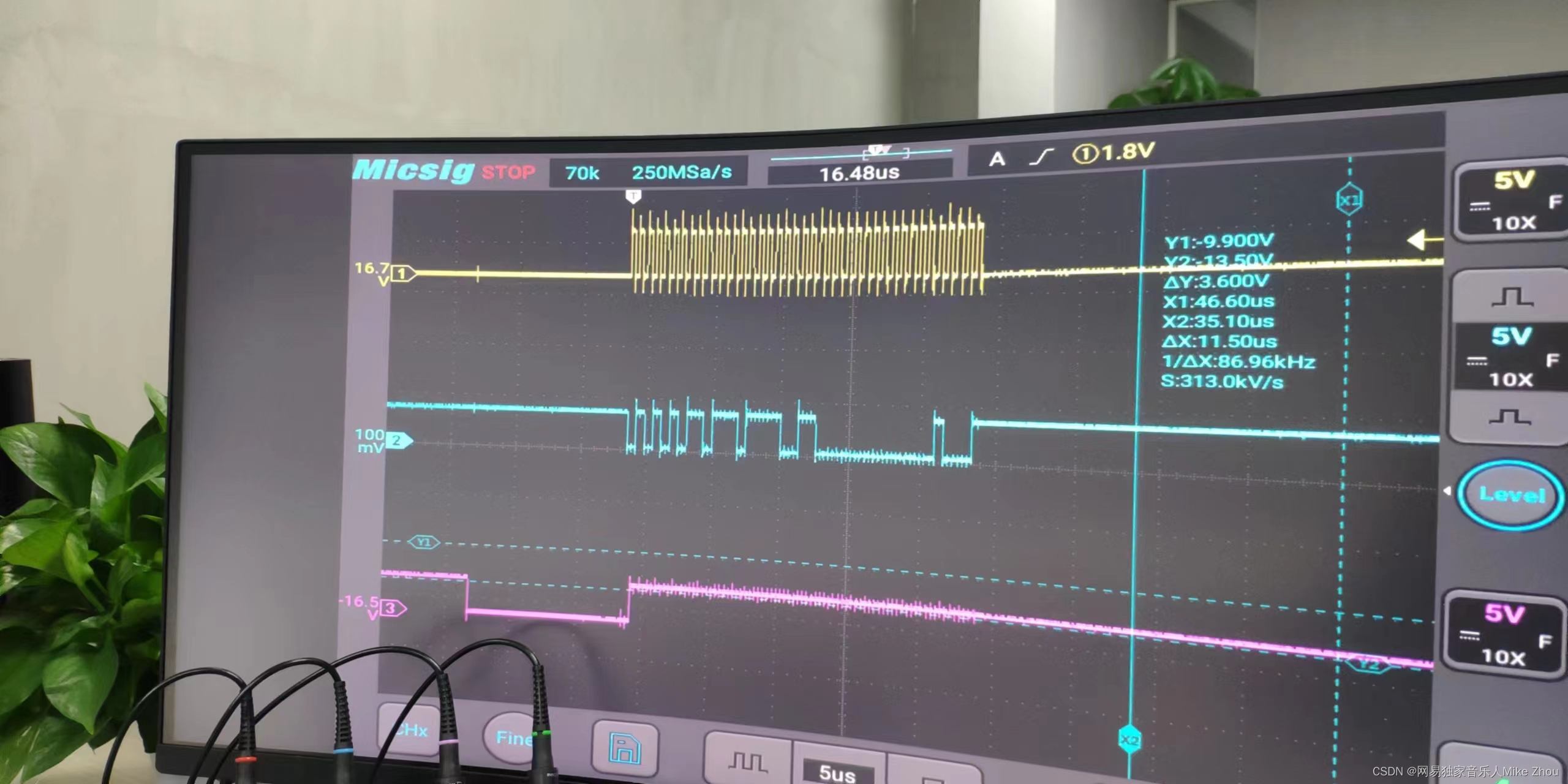
【本文地址】