|
之前利用movebase导航定位都是通过rviz用鼠标指来指去,实验时非常方便,但实际应用总不能也人工指来指去吧,这怎么体现智能呢
启动导航后,用以前使用的rviz设设置目标点来获取map坐标系下的位置坐标
使用 2d Nav Goal 指你想要的家坐标
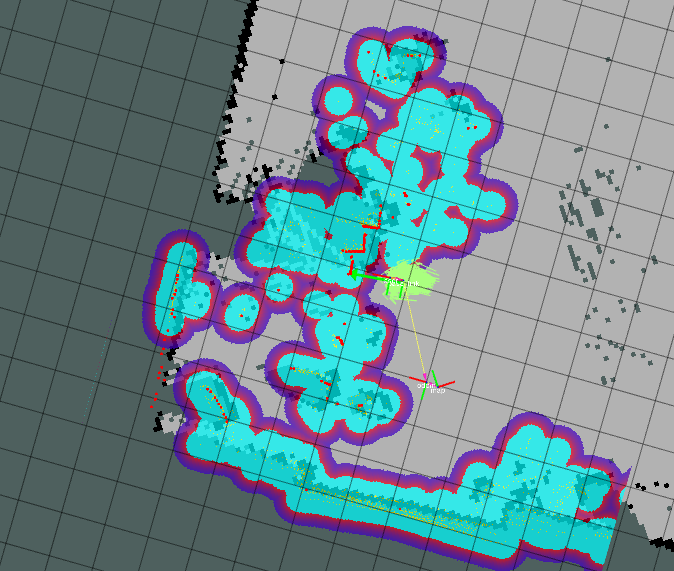
查看rviz终端信息
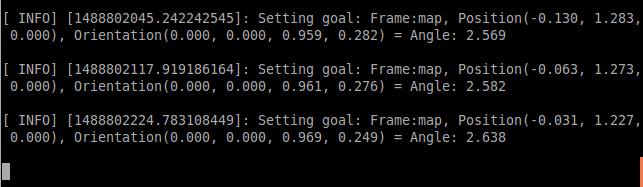
填写以下坐标: geometry_msgs::PoseWithCovarianceStamped msg_poseinit;
msg_poseinit.header.frame_id = "map";
msg_poseinit.header.stamp = ros::Time::now();
msg_poseinit.pose.pose.position.x = -0.644479990005;
msg_poseinit.pose.pose.position.y = 2.2030518055;
msg_poseinit.pose.pose.position.z = 0;
msg_poseinit.pose.pose.orientation.x = 0.0;
msg_poseinit.pose.pose.orientation.y = 0.0;
msg_poseinit.pose.pose.orientation.z = -0.746261929753;
msg_poseinit.pose.
|