通信原理几种调制方式 |
您所在的位置:网站首页 › rfid信号调制的三种方式有哪些 › 通信原理几种调制方式 |
通信原理几种调制方式
|
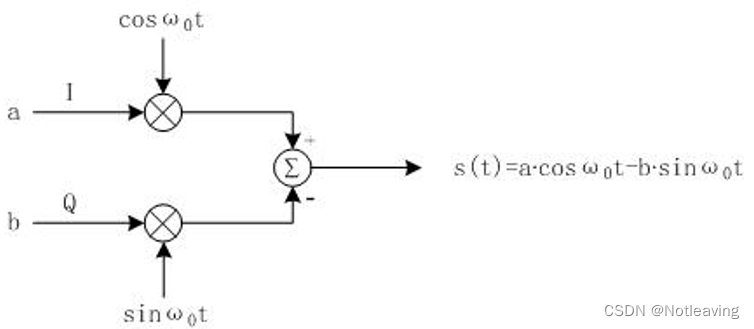
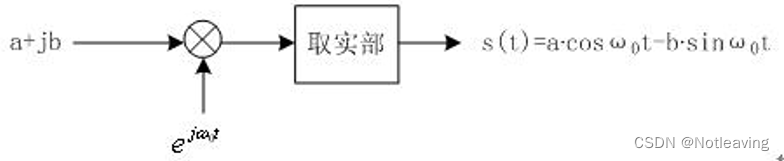
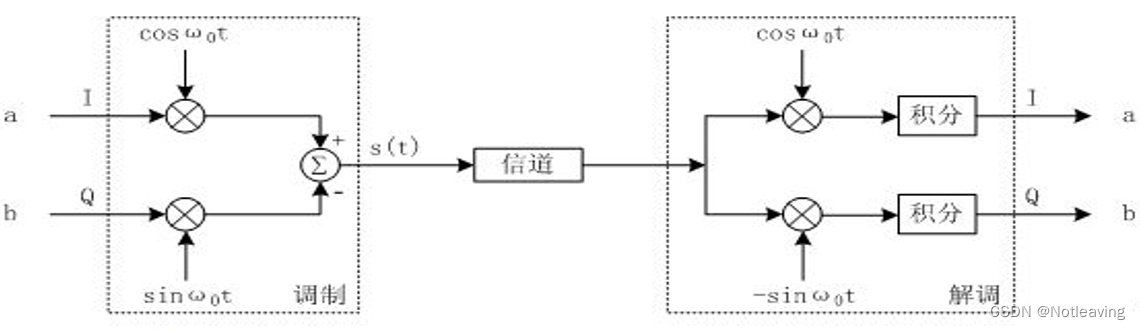
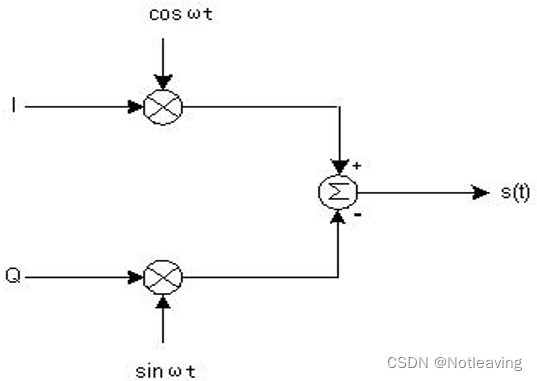
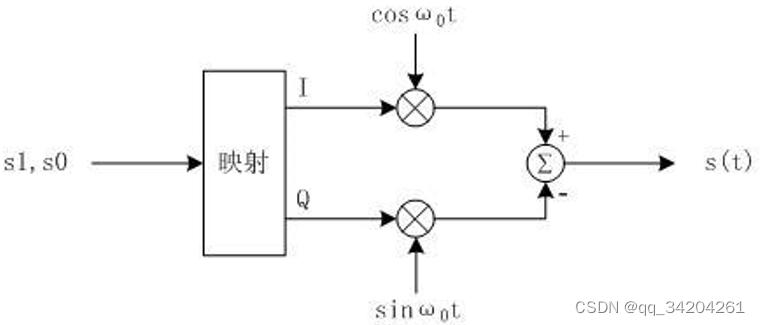
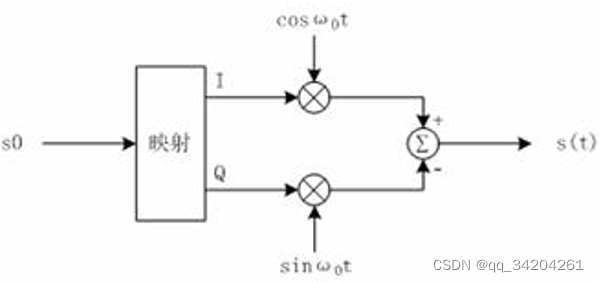
IQ调制:I是in-phase 同向,Q是quadrature 正交 IQ信号是输入到正交调制器的信号,一般表示为 a+jb 。 调制过程:I路输入数据a与coswt相乘,Q路数据与-sinw0t相乘,然后叠加得到调制信号s(t)=acosw0t-bsinw0t,如下图所示:
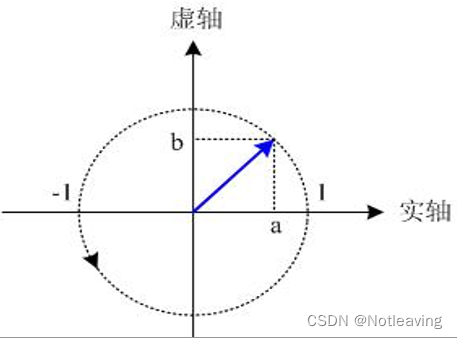
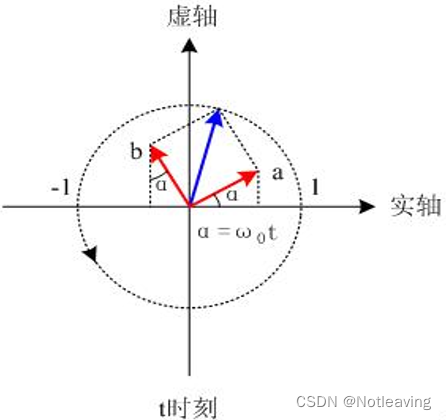
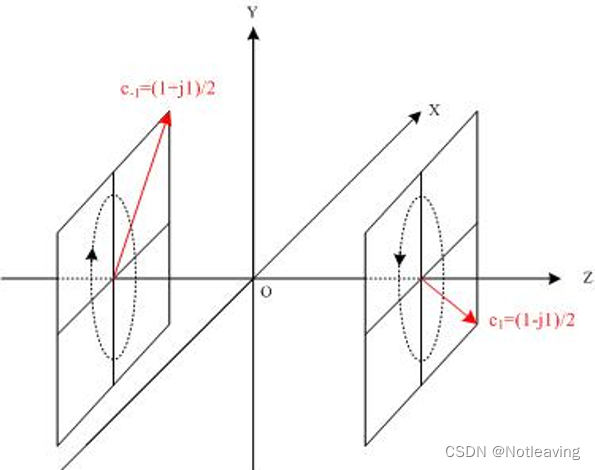
旋转向量为两个复数相乘:ck*e^jkw0t。在复平面上,复数ck表示向量的初始位置;e^jkw0t为初始位置在实轴上,模为1,旋转角速度为kw0的旋转向量(k为正,逆时针转,k为负,顺时针转);最后得到的旋转向量为以向量ck确定的初始位置,模为|ck|,旋转角速度为kw0的旋转向量。 a+jb代表的向量,乘旋转向量e^jw0t后代表的向量分别如图所示:
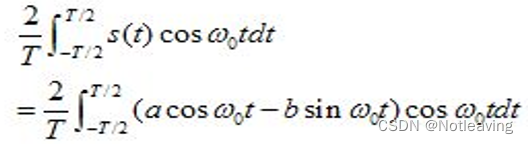
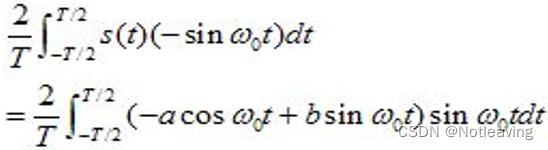
代表a路b路数据的红色向量在调制过程中时钟保持正交(IQ调制的两个载波保持正交),所以IQ调制叫正交调制。 另外,虽然IQ调制中把相关信号用复数形式表示,但调制过程中的信号a,b,cosw0t,sinw0t,s(t)均为实信号。 IQ解调: 将接收到的解调信号也分为两路,一路乘cosw0t再积分得到I路数据a,另一路乘-sinw0t再积分得到Q路数据b,如下图所示:
IQ调制信号:
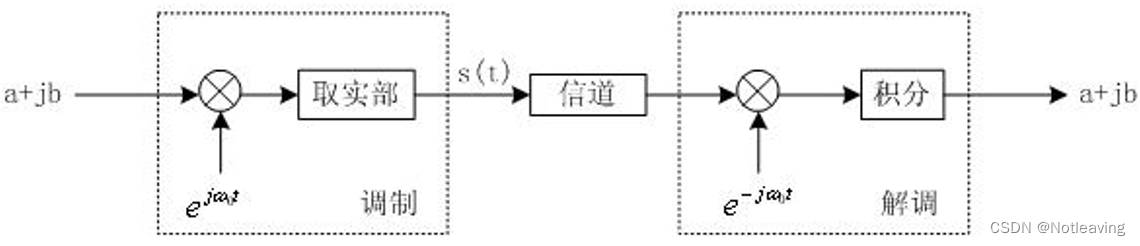
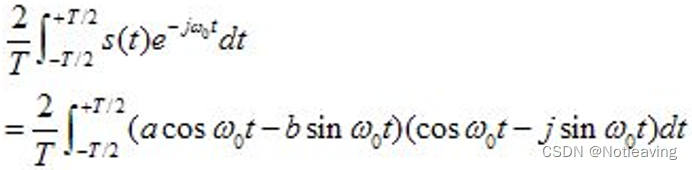
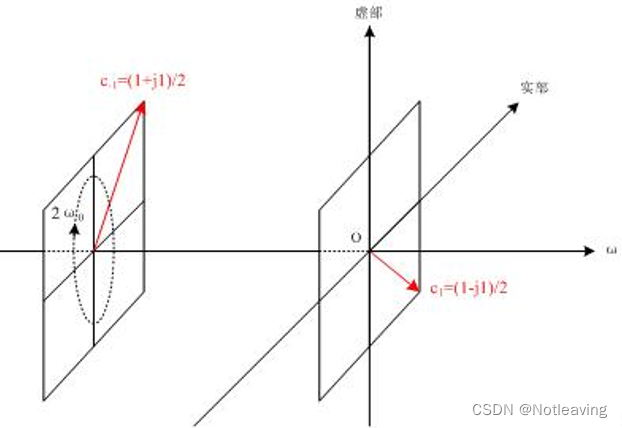
即s(t)由两个旋转角速度数值相同方向相反的旋转向量合成。 将s(t)与一个初始位置在实轴上,顺时针旋转,角速度为w0,模为1的旋转向量即e^-jw0t相乘,即可得到一个不旋转的向量(a/2+jb/2)和一个顺时针旋转的角速度为2w0的旋转向量:
通过积分或低通滤波器将不旋转的向量取出,再乘以2,就得到(a+jb)。 假设a=1,b=-1,在0时刻时,所在位置如下左图所示,乘以e^-jw0t后如下右图所示:
将得到的不旋转的向量(1/2-j/2)取出,乘2,就得到了a和b,完成解调。 OFDM:Orthogonal Frequency Division Multiplexing 正交频分复用
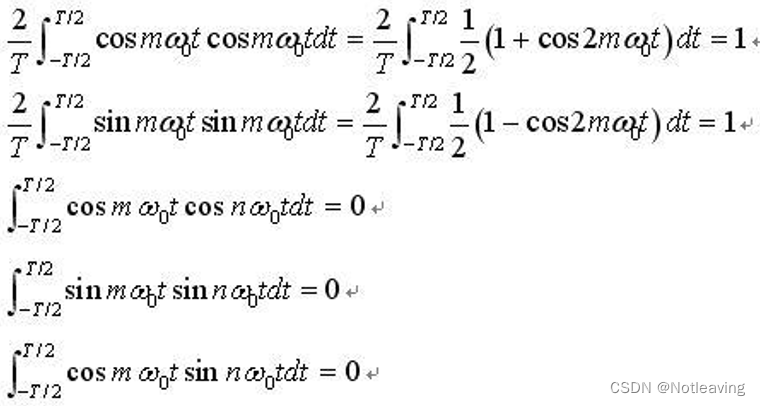
利用三角函数的正交性:
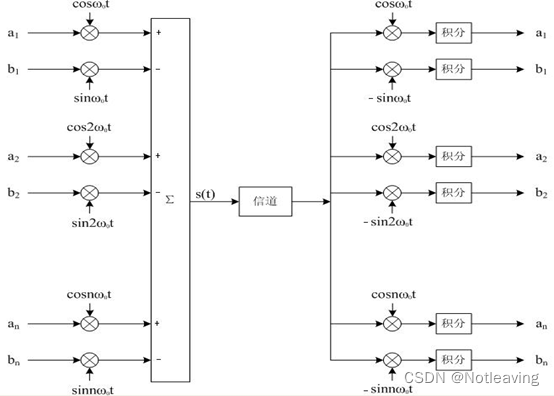
发送端OFDM调制信号
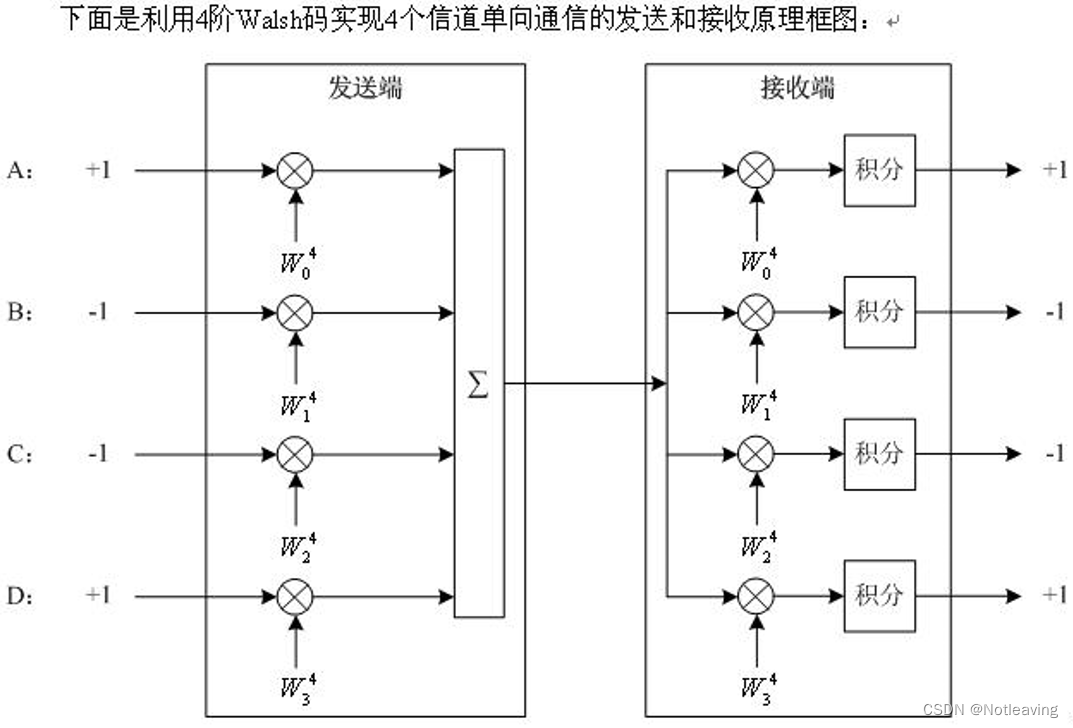
在接收端,将接收到的s(t)乘以cosmw0t,进行积分即可得到am,乘以-sinnw0t,进行积分即可得到bm。 CDMA:Code Division Multiple Access 码分多址 与正交调制所用的三角函数具有正交性,有一些码(矩形脉冲串)也具有正交性,如CDMA所使用的walsh码,以最简单的4阶walsh码为例:
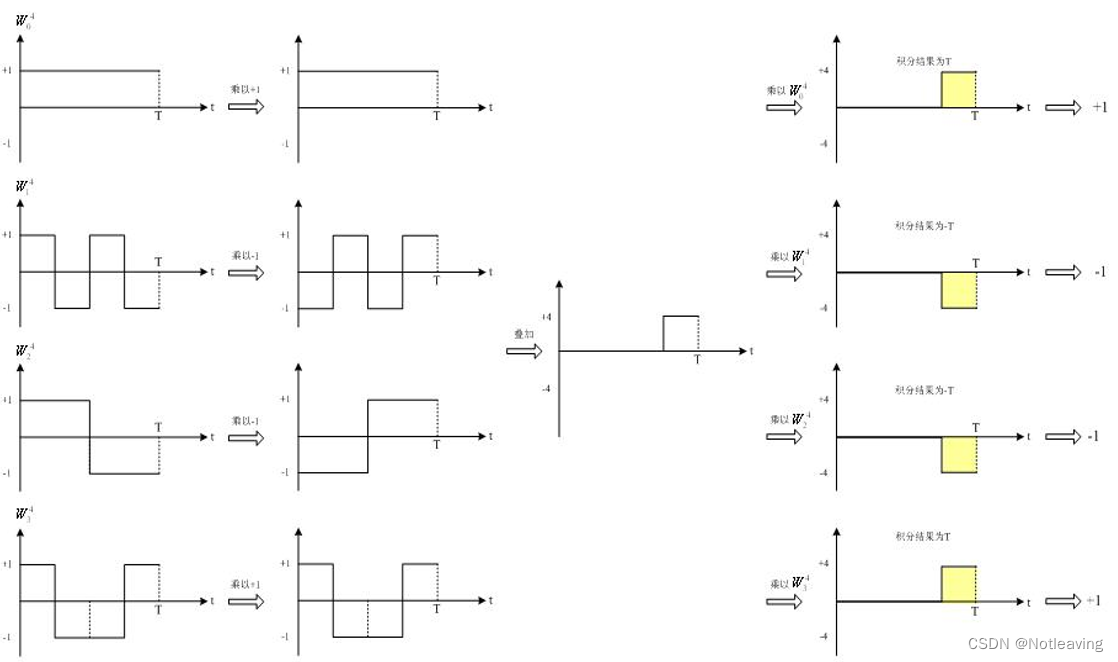
不同的wlash码相乘,再在一个周期T内进行积分,结果为0; 相同的wlash码相乘,再在一个周期T内进行积分,结果为T。
验算如下图:
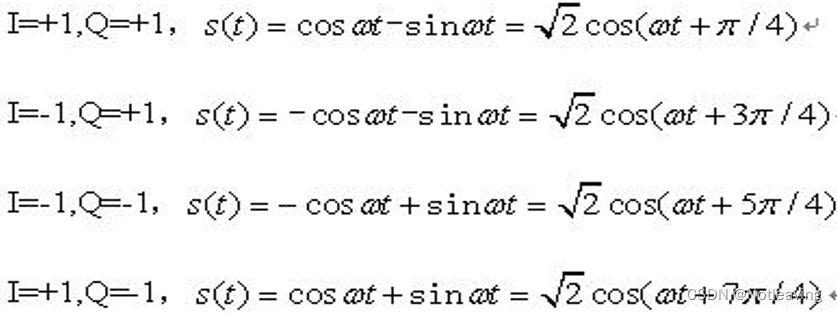
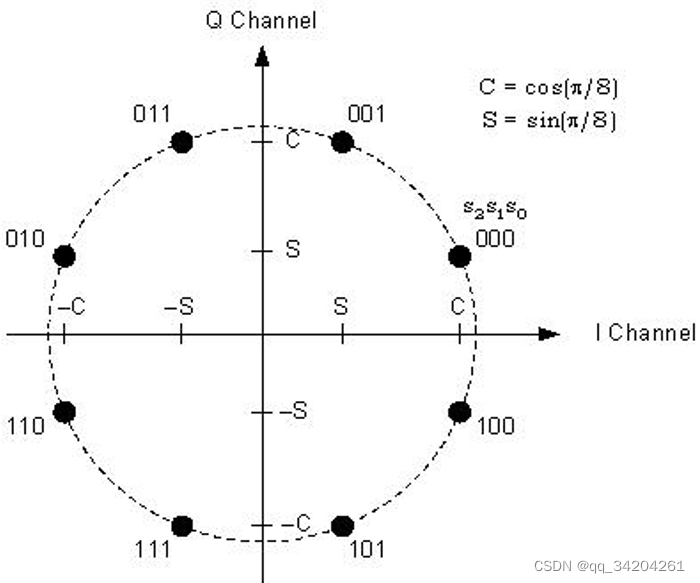
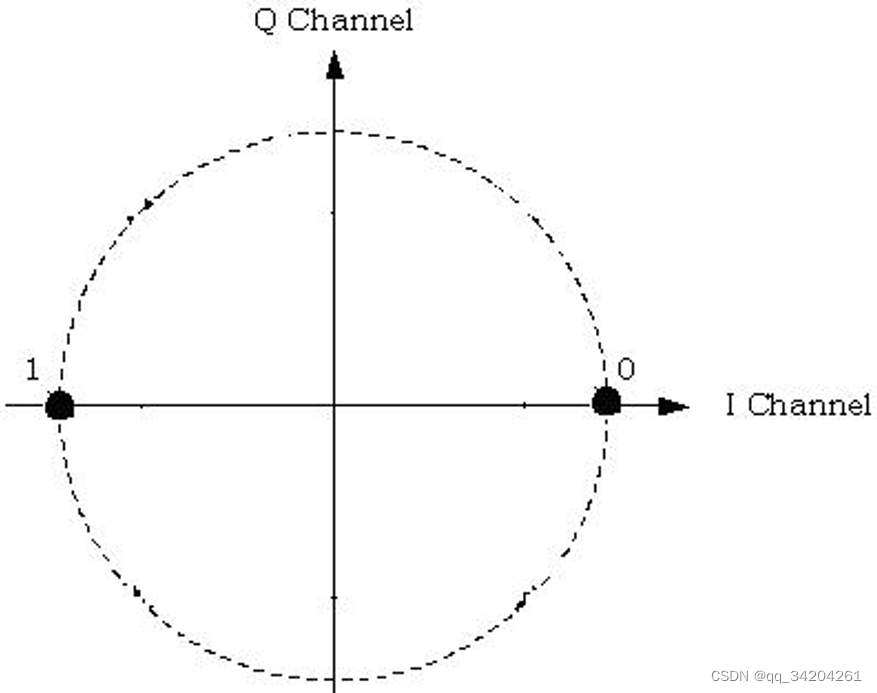
PSK:Phase Shift Keying 相移键控 BPSK:Binary PSK 二相相移键控 QPSK:Quadrature PSK 正交相移键控 8PSK MPSK:multiple phase shift keying 多进制数字相位调制 MQAM:Multiple Quadrature Amplitude Modulation 多进制正交幅度调制 根据输入,通过按键控制输出哪个信号,例如输入0时输出cosw0t,相位为0,输入1时输出cos(w0t+pi),相位为pi。这是BPSK最初含义。BPSK:用2个相位分别表示0,1; QPSK:用4个相位分别表示00,01,11,10; 8PSK:用8个相位分别表示000,001,011,010,110,111,101,100; 用IQ调制实现QPSK调制:在IQ调制器输入端分别输入(+1,+1),(-1,+1),(-1,-1),(+1,-1),如下图:
s(t) = I*coswt - Q*sinwt = Acos(wt+
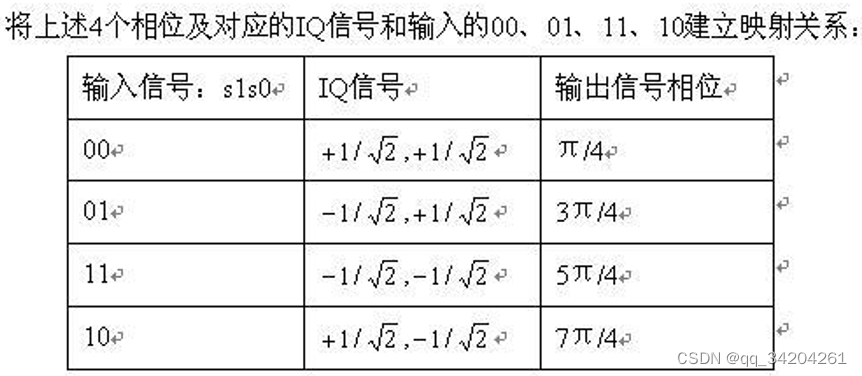
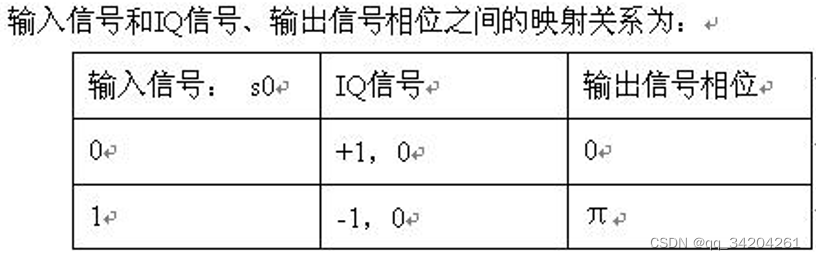
将输入数据每两个比特作为一组:s1s0,再根据上面的映射关系转换为对应的IQ信号,最终对应一个输出信号的相位。
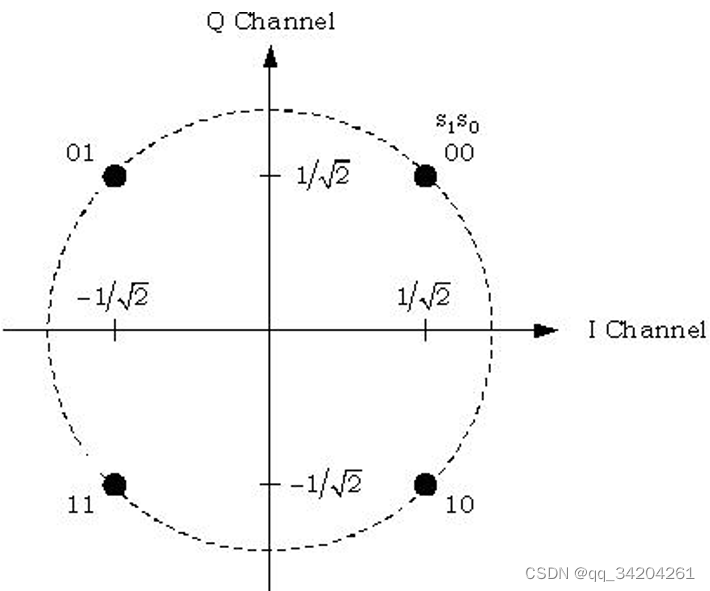
QPSK调制的星座图可用映射关系表示:
也可用复数运算解释: 根据利用复数运算来实现IQ调制解调的方式,对于QPSK来说,a,b的取值+1/ 星象图如下:
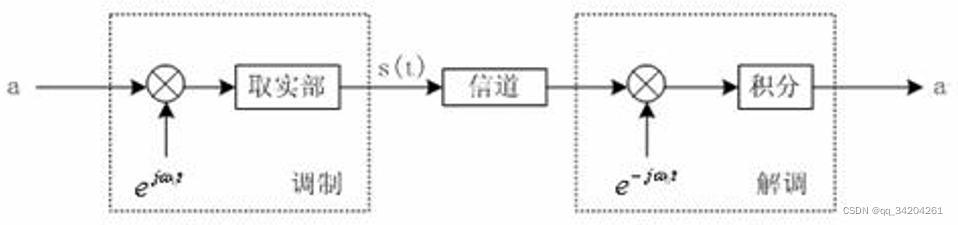
令正交调制器的一路数据为0,如下图所示:
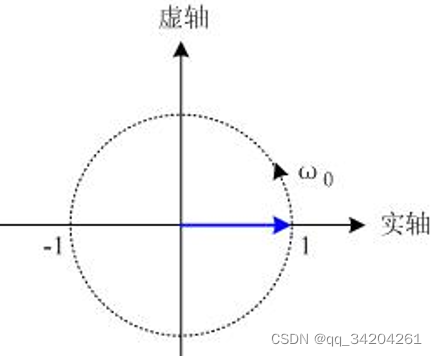
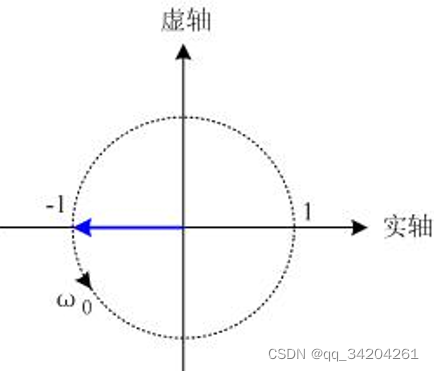
当输入为1时,s(t) = cosw0t,为e^jw0t的实部,如下左图中旋转向量在实轴的投影: 当输入为0时,s(t) = -cosw0t = cos(w0t + pi),为e^j(w0t+pi),为e^j(w0t+pi)的实部,如下右图中旋转向量在实轴的投影:
如用旋转向量理解正交调制一样,当输入为1,
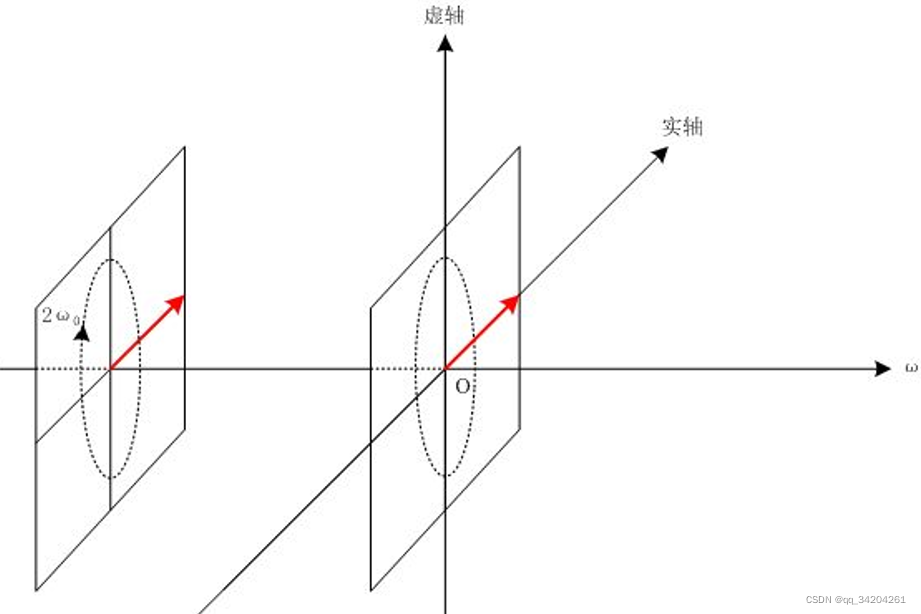
乘一个顺时针旋转,旋转速度为w0,模值为1的旋转向量e^-jw0t,再乘2,得到一个在实轴上不旋转的向量和一个顺时针旋转,旋转速度为2w0,模值为1的旋转向量e^-j2w0t,s(t)如下左图所示,乘e^-jw0t后如下右图所示。通过积分或低通滤波器取出不旋转的向量即解调出+1,可得知发送段的输入信号为1。
当输入为0,
乘一个顺时针旋转,旋转速度为w0,模值为1的旋转向量e^-jw0t,再乘2,得到一个在实轴上不旋转的向量和一个顺时针旋转,旋转速度为2w0,模值为1的旋转向量e^-j2w0t, s(t)如下左图所示,乘e^-jw0t后如下右图所示。通过积分或低通滤波器取出不旋转的向量即解调出+1,可得知发送段的输入信号为1。 当输入为1,
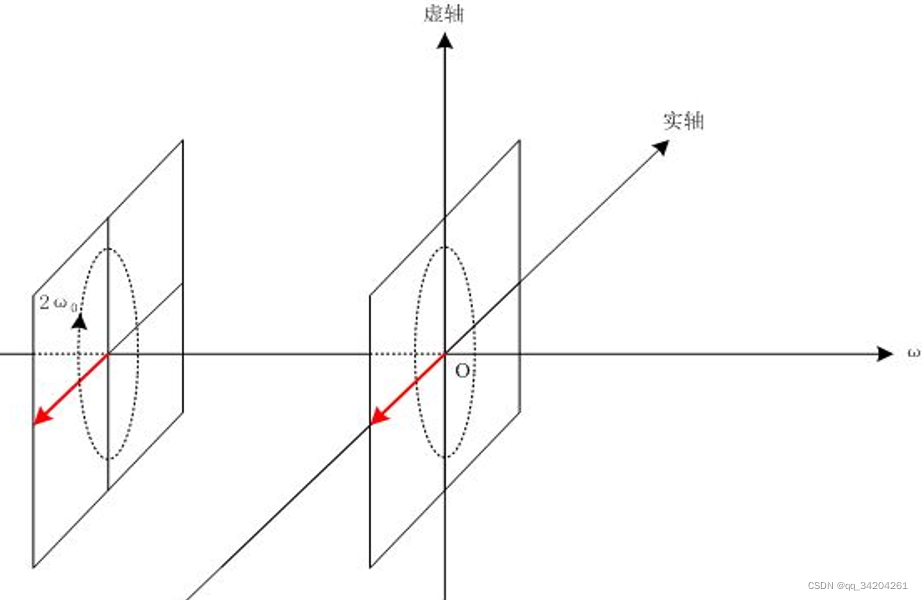
乘一个顺时针旋转,旋转速度为w0,模值为1的旋转向量e^-jw0t,再乘2,得到一个在实轴上不旋转的向量和一个顺时针旋转,旋转速度为2w0,模值为1的旋转向量e^-j2w0t,
s(t)乘e^-jw0t后如下图所示。通过积分或低通滤波器取出不旋转的向量即解调出-1,可得知发送段的输入信号为0。
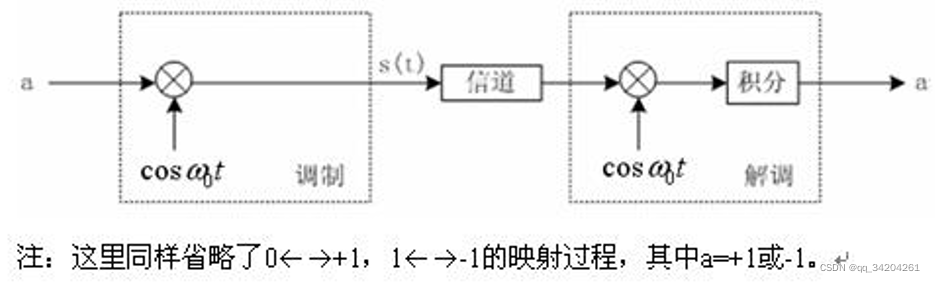
令用复数运算实现IQ调制的输入信号a+jb的b为0,就可实现:
注:此处省略了0对应+1,1对应-1的映射过程,a为+1或-1。 用实数运算实现BPSK调制和解调: 这两种方法上的积分都可换成低通滤波器。 |




【本文地址】
今日新闻 |
推荐新闻 |