【论文阅读】RAL2020: UFOMap An Efficient Probabilistic 3D Mapping Framework That Embraces the Unknown |
您所在的位置:网站首页 › pruning中文意思 › 【论文阅读】RAL2020: UFOMap An Efficient Probabilistic 3D Mapping Framework That Embraces the Unknown |
【论文阅读】RAL2020: UFOMap An Efficient Probabilistic 3D Mapping Framework That Embraces the Unknown
|
!!知乎处温馨提示: 知乎这边markdown导入缩进的 代码行 行内公式 有点问题... 所以格式会有一定问题(暂未找到一个很好的解决办法),非常建议跳转外链-博客园/CSDN,但是讨论/点赞等可以在知乎进行... /dog 有点赞才有动力 hhhh 外链完美契合markdown格式:博客园,CSDN Last edited time: March 31, 2023 1:30 PM Reference and prenotes Paper link:https://ieeexplore.ieee.org/document/9158399 Code link:https://github.com/UnknownFreeOccupied/ufomap 1. Motivation主要是针对octomap的,framework去做对比和实验 octomap 对于unknown space并没有进行表示,叶节点状态主要是 是否被占据的概率;而是这对于planning的碰检来说很重要操作octomap是比较耗时而且有限的操作Contribution显示的进行 unknown space的表达加速查找过程:Indicator values for the inner nodes summarizing the state of children for faster state based queries加速traversal:Morton codes for faster traversal of the octree给八叉树加了一种快速的raycasting方式:A fast ray casting approach for integrating data into the octree voxel hashing:voxblox Voxblox builds on [13] where they use a spatial hashing scheme and allocate blocks of fixed size when needed octree-based: OctoMap octomap对比于voxblox 可以更节约内存 or a fixed grid structure 保存在不同分辨率下的八叉树内 2. Methodufomap基于octomap来看: 每一个node都有一个占据值 去标识是否 occupancy/free/unknown 保存的是log-odds occupancy value A probabilistic occupancy value is used in order to better handle sensor noise and dynamic environments 与octomap相同的是,每一个node有的是它所有children中的最大占据值,方便路径规划 [x] 但是octomap中我记得unknown的节点其实是空的(被剪掉的) 为了节约memory的操作,其实也不算 本身其不做 只是为了 memory save的原因 而不做吧? nope duberg大哥说 即使是空的 octomap 还是给了pointer,一个pointer是8个bits,所以他们只是空了 剪掉了 但是pointer没剪掉 所以这就是为什么下面实验中 ufomap可以省空间的原因,因为ufomap是一个pointer到一个array 里面是children 看下面framework介绍 因为这个问题是我看完全文问的 2.1 FrameworkUFOMap 保存三个 indicators $i_f,i_u,i_a$ 前两个指示 这个是否是free/unknown,而被占据的不需要再单独给出一个 因为有 occupancy value; 注意,当更新Octree时 indicator values 也会随着树向上传播 propagated upwards 最后一个则是判断所有children是否是一样的,主要是在自动pruning被禁止时 可以有相同的功能 自动pruning 意味着当数据被删除或者插入数据时,octree会自动pruned,而禁止他的主要原因是 我们想同时进行读取、插入和删除数据 而此 indicators 也可以提高 traversing 整个树的效率,比如当我们仅寻找unknown space的时候问题区 [x] indicator values 和 occupancy values不是同一个东西? 不是 indicator 是 0/1 occupancy value是一个float值 [x] 这里的 pruning 被禁止 可以有相同的功能是指?人为去判断是否要进行嘛? [原文: $i_a$ is useful in cases where automatic pruning has been disabled, but you still want the same behavior as if it were enabled. ] 是的 原文里 有 同时进行访问 插入 删除的时候 会禁止,这种情况下 就由 我们手动指定什么时候做 prune [x] pruned 操作在 code 中的体现? 不用管 用就行了 [x] [原文:The third indicator, ia, indicates whether all of a node’s children are the same. ] 这里的判断是否是一样的是指 前面两个 indicators嘛?还是指 free/occupancy/unknown 感觉是的… 确认一下吧 MK: 根据Fig 2图c感觉应该就是(~if) | (~iu)。图里没给if iu都是0的情况,但ia=1应该不需要找children了,而if iu都是0说明全occupied,应该还要找到d_max为止 2.2 NodeA. State 节点状态OctoMap 的节点状态 如下表示: \operatorname{state}(n)= \begin{cases}\text { unknown } & \text { if } n \text { is null pointer } \\ \text { occupied } & \text { if } t_o \leq \operatorname{occ}(n) \\ \text { free } & \text { else. }\end{cases} occ(n) 表示了 node n的occupancy value$t_o$ 表示OctoMap里的阈值 value超过这个值 则意味着 occupied而 UFOMap 里的节点状态 进行了一点扩充 加入了另一个 $t_f$ 阈值 来只是如果超过小于此 则说明是free状态 \operatorname{state}(n)= \begin{cases}\text { unknown } & \text { if } t_f \leq \operatorname{occ}(n) \leq t_o \\ \text { occupied } & \text { if } t_o\operatorname{occ}(n)\end{cases} 比如 设定 tf = 0.1 to=0.9,节点本身只有在确定自己是被占据/free的时候 才给状态 否则就是未知,这对于 exploration和reconstruction的任务 可以快速定位到 unknown 进行处理 再比如 设定 tf=0.5 to=0.9 则意味着 exploration algorithm 可以将注意力集中在 occupancy 区域. meaning you would target higher certainty about the occupied space. [x] tf=0.5 to=0.9的时候 为什么是 [meaning you would target higher certainty about the occupied space.] 主要是对occ的判断只和 to有关 to=0.9是不变的,只是说变unknown的条件更严格了吧? 是的 因为前面的是 tf=0.1 to=0.9 所以是对free和occupied都 严格; tf=0.5 to=0.9的画 就是只对occupied严格了,duberg说他应该写一个only B. TypesOctoMap: inner nodes and inner leaf nodes UFOMap: inner nodes, inner leaf nodes, and leaf nodes. [多了一个leaf node] 以下为详细的解释: inner nodes 是指所有 有 children 的 nodes,一个inner node里面包含:log-odds occupancy valuethree indicators [在前面提到的 $i_f,i_u,i_a$ ]一个指向其children的指针数组 [a pointer to an array of its children]inner leaf nodes,和上面那个完全相同,不通电在于 inner nodes 没有children 也就是 child pointer是一个空的指针 【这是OctoMap里面仅存在的leaf node】leaf nodes 仅存储 log-odd value 对比 inner leaf node, leaf node 不可能会有children下图是三个nodes的展示: 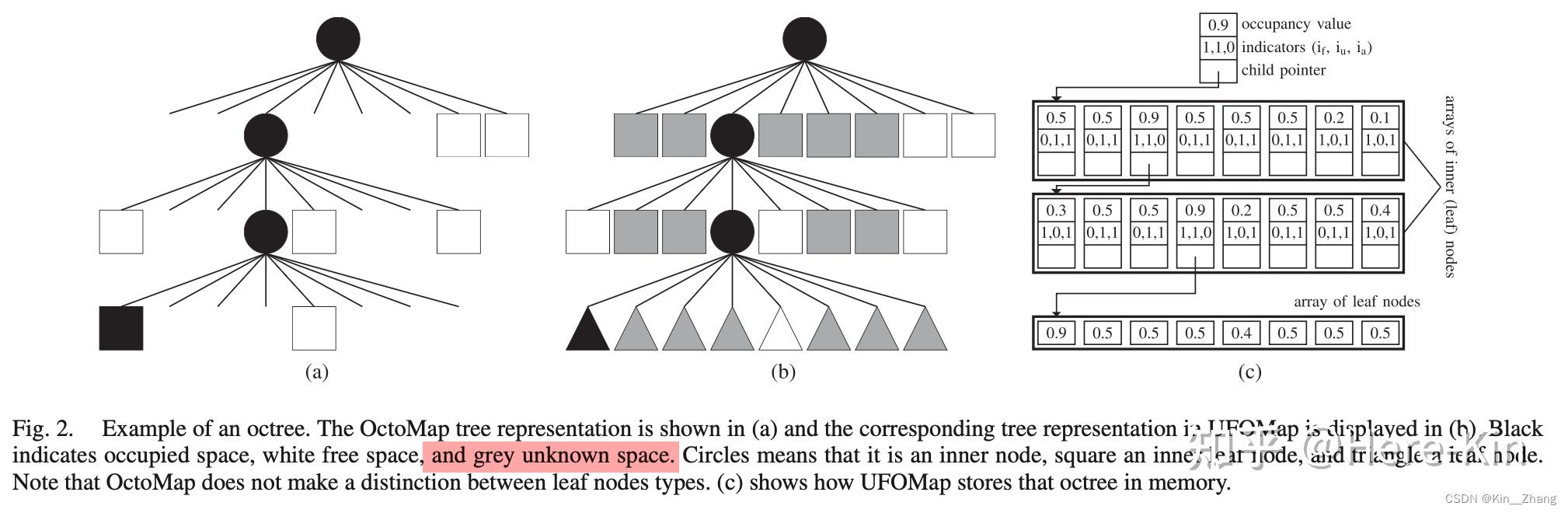 (b, c) 是 UFOMap的哈: 从c顶端可以看到的 是 inner nodes 具有:log-odds value, indicators, 指向child pointer然后往下第二层,没有children 指针的那些都是 inner leaf nodes再往下最后一层 只有occupancy value是 leaf node [x] 那这个inner leaf nodes存在的意义是? 名字 进行区分 [x] 这两句话 inner leaf node 和 leaf node都没有 children不是矛盾的嘛? the inner leaf nodes have no children, meaning the child pointer is a null pointerCompared to an inner leaf node, it is not possible for a leaf node to have children.【我感觉是 区别应该是 是否有 indicators】 2.3 Morton codes参考文献[15] 中文博客有一些解释:莫顿码:莫顿码是将多维数据转化为一维数据的编码 首先将 笛卡尔坐标系的 点云 $c = (c_x,c_y,c_z) \in \R^3$ 转到 octree node的index tuple $k=(k_x,k_y,k_z) \in \N^3_0$ ,其中 k的计算为: k_j=\left\lfloor\frac{c_j}{\text { res }}\right\rfloor+2^{d_{\max }-1} 如下图所示的通过交错表示 kj 的位,可以为 一个点云坐标闯进对应的 莫顿码 m
 然后可以从根节点向下遍历到这个节点,原文 From the root node it is then possible to traverse down to the node by simply looking at the three bits of $m$ that corresponds to the depth of the child and moving to that child [x] 代码中 这里 右移 又左移 不就没有了定位到那个depth了嘛? cpp using code_t = uint64_t; using depth_t = uint8_t; /*! * @brief Return the code at a specified depth * * @param depth The depth of the code * @return Code The code at the specified depth */ constexpr Code toDepth(depth_t depth) const { code_t temp = 3 * depth; return Code((code_ >> temp) > temp) 然后可以从根节点向下遍历到这个节点,原文 From the root node it is then possible to traverse down to the node by simply looking at the three bits of $m$ that corresponds to the depth of the child and moving to that child [x] 代码中 这里 右移 又左移 不就没有了定位到那个depth了嘛? cpp using code_t = uint64_t; using depth_t = uint8_t; /*! * @brief Return the code at a specified depth * * @param depth The depth of the code * @return Code The code at the specified depth */ constexpr Code toDepth(depth_t depth) const { code_t temp = 3 * depth; return Code((code_ >> temp) > temp) 其中为了 补偿 occupancy value在方法三 遇到 larger surface 下降的情况,the clearing 会有一个因子 $\frac{1}{2d+1}$ 在所有方法中 occupancy grid都是以最高分辨率进行的更新,因此三种ray方案在occupancy 下 几乎是一样的 如上图四的比较 问题区 [x] Ray marching is performed until n nodes, at that resolution, away from the end node. 远离end node是什么意思? 不太懂 是指 这个分辨率 还没到 end node 也就是leaf node 3. Experiments首先是关于区分 inner leaf node 和 leaf node ,因为OctoMap里面 他们都是一个 inner leaf node 从 [5] 中 我们得知 大多数 octree node 在OctoMap 里都是 inner leaf node [80-85%] 而在UFOMap里面 因为我们再次做了区分,所以这个值下降了71-81%,也就是说大部分节点 其实是leaf node,通过UFOMap的再次划分 即使是我们的树节点总数增加的情况下,也可以明显减少内存使用量 对比OctoMap 减少了三倍 【参考问题 ① 】  [x] ① 这个内存减少 如果 inner leaf node里面只存了log-odd value 再加上一个空指针 并不会耗多少memeory吧?所以减少的不是因为 我们把 inner leaf node区分开了吧? !!问一下duberg 因为实际上的octomap上存的虽然是空指针 但是一个指针 8bits, 即使空的 9*8=72,但是ufomap只需要一个pointer,也就是8个bits,然后指针指向children array开头,而octomap需要先做一个pointer指向parent的指针位置 然后再指向找到想到的那个children的pointer [x] ① 这个内存减少 如果 inner leaf node里面只存了log-odd value 再加上一个空指针 并不会耗多少memeory吧?所以减少的不是因为 我们把 inner leaf node区分开了吧? !!问一下duberg 因为实际上的octomap上存的虽然是空指针 但是一个指针 8bits, 即使空的 9*8=72,但是ufomap只需要一个pointer,也就是8个bits,然后指针指向children array开头,而octomap需要先做一个pointer指向parent的指针位置 然后再指向找到想到的那个children的pointer 图五则是不同的 ray 方案 也就是 2.4里提到的: 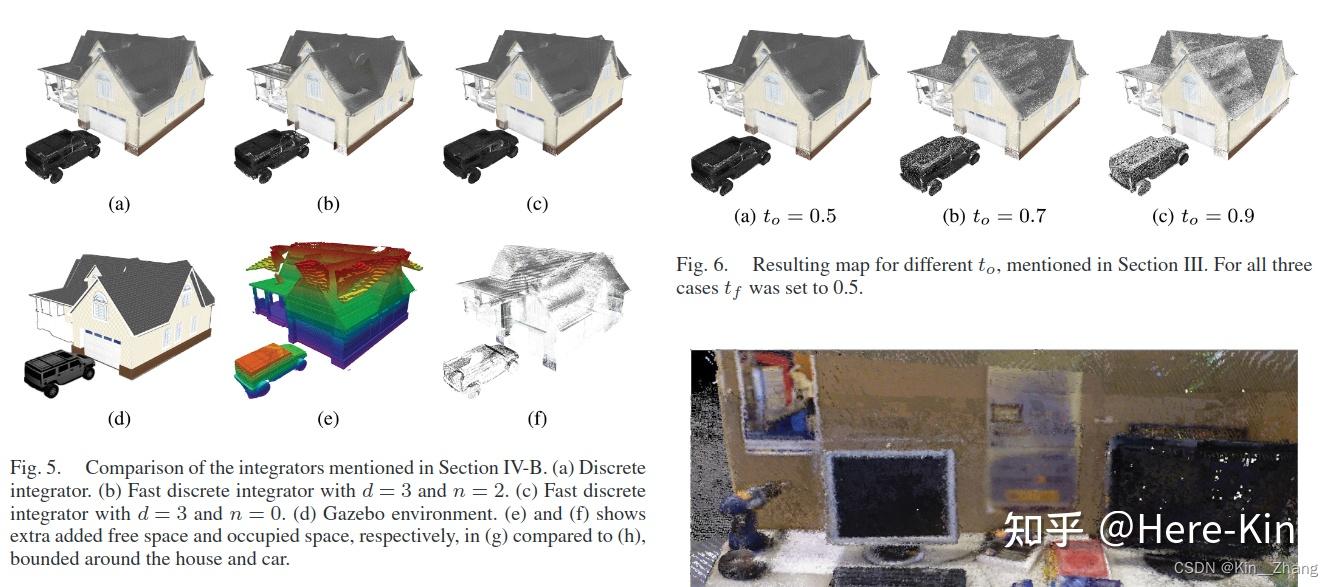 这里则是不同的操作的时间对比 主要和OctoMap对比  Other words Other words妙啊,然后有 作者Duberg 再旁边解释 也太爽了 hhhh 当然里面的解释还是我转述的哈,如果有啥不对的 不是Duberg哥的锅 是我的理解的锅 Duberg 大哥和我说 不用看内在代码 用就行了,寻思着 我写的C++技巧过多 你可能陷进去了 最后 February 22, 2023 更新一下用UFOMap做下游任务的一系列paper 现在ufomap的文档还没更新 所以使用者都是由作者手把手教学 hhh 等后面文档更新了 可能使用的人可以开始变得更多 天明哥的 SLAM 开源了:SLICT: Multi-Input Multi-Scale Surfel-Based Lidar-Inertial Continuous-Time Odometry and MappingDuberg在1.0的基础上做了 planning 工作 UFOExplorer:UFOExplorer: Fast and Scalable Sampling-Based Exploration With a Graph-Based Planning Structure本人小试… 还在进行中 等后面来更新赠人点赞 手有余香 ;正向回馈 才能更好开放记录 hhh |
【本文地址】
今日新闻 |
推荐新闻 |