基于粒子群算法的多无人机协同任务分配 |
您所在的位置:网站首页 › matlab查找函数位置 › 基于粒子群算法的多无人机协同任务分配 |
基于粒子群算法的多无人机协同任务分配
|
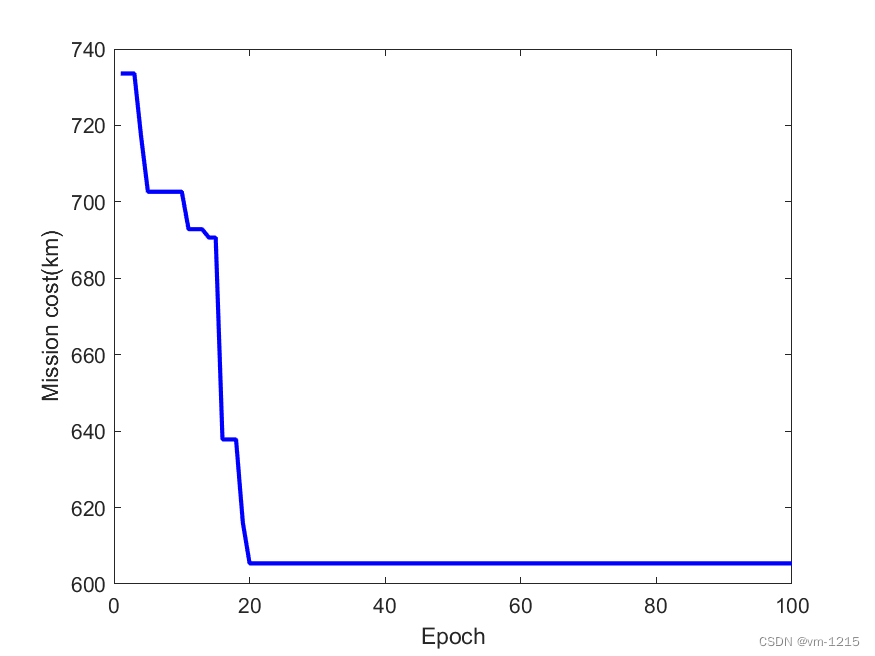
目录 1.问题背景 1.1 无人机任务分配: 1.2 场景设置: 2.解决思路 2.1 粒子群优化 2.1.1 相关背景 2.1.2 算法流程 2.2 应用思路 3.MATLAB代码实现 4.输出结果 【若觉文章质量良好且有用,请别忘了点赞收藏加关注,这将是我继续分享的动力,万分感谢!】 1.问题背景 1.1 无人机任务分配:使用4(自定义)台无人机,对8(自定义)个目标分别执行“分类,攻击,毁伤评估”任务。因此,对无人机和目标进行一一匹配,则总共有3*8=24个小任务。 1.2 场景设置:在范围为(0,0)到(300,300)单位(KM)平面坐标系内随机取8个目标点,(仿真时取200到250)间较分散(坐标差大于3)的点,减少后期的误差; 4个飞机初始点(0到50),分别给与坐标位置; 无人机航向∈(0°, 360°),目标航向∈(0°, 360°),初始速度100M/s,目标假设静止; 最小转弯半径为1.5KM 2.解决思路 2.1 粒子群优化 2.1.1 相关背景粒子群算法(PSO)是智能优化算法中的一类,一种基于群体的随机优化技术。由R.Eberhart博士和J.Kennedy博士于1995年发明,源于对鸟群捕食行为的研究。与其他同类进化算法不同,粒子群优化并非采用群体解的竞争机制来迭代产生最优解,而是群体解的合作机制来迭代产生最优解;此外,相比之下,PSO概念简单、易实现,且需调节的参数少,是不少研究的主要优化工具。 2.1.2 算法流程初始化粒子群 迭代 粒子相互之间交换信息,获取彼此间的适应度值信息; 各个粒子根据获取信息更新位置和速度; 输出结果 2.2 应用思路 每一个粒子代表了一次完整的任务分配方案。粒子中包含两个向量,UAV向量和Target向量。UAV向量表示无人机的出发序列,是一个24维的向量,每一维的取值范围为序号1到4。Target向量表示UAV向量对应的目标序列,也是一个32维向量,每一维向量为序号1到8,且每个序号总共出现3次。任务分配完毕后,每一台无人机都是按着UAV向量和Target向量的对应顺序,各自执行分配给每一台无人机的任务,待最后一台无人机执行完任务后,整个任务结束。Target和Vehicle向量组成的粒子用来计算代价函数。任务的代价评估分两个重要量:整个无人机群所消耗的油量代价V1,由整个无人机群的总航程来计算的,越小越好;整个无人机群执行任务所消耗的总时间V2,由航程最长的无人机来决定的,同样越小越好;总V=A×V1+B×V2。计算每台飞机单次小任务的航程:目标与无人机的初始位置以及无人机的初始速度和航向都已知,考虑到无人机有转向过载限制。在此规定每台无人机转向的最小曲率圆,即转弯半径为1.5KM,在计算航程时按DUBINS曲线来计算单次任务的航程(最小航程)。然后再得出大任务的总航程V1,再计算每台无人机分别的航程并找出最大值V2。用V1和V2去计算V。模型目标为找到代价函数的最大值粒子,当作任务分配的最终选择。迭代次数为100,粒子数为1000。 3.MATLAB代码实现 clc clear %% 粒子群算法 Nv = 4; % 无人机 Nt = 8; % 目标 Np = 3; % 任务数 Nc = Nt * Np; % 匹配对 (目标*任务) n = 1000; % 粒子群规模 iter = 100; % 迭代次数 c1 = 0.95; c2 = 0.35; w = 0.9; A = 0.95;% 目标函数1的权重 B = 0.05;% 目标函数2的权重 % 初始 Vehicle = randi([1 3],n,18); for i = 1:n Target(i,:) = fix((randperm(18)-1)/3)+1; F(1,i) = fitness(Vehicle(i,:),Target(i,:)); end F_p_min(1) = min(F(1,:)); F_min(1) = min(F_p_min); p_Vehicle(1,:) = Vehicle(find(F(1,:) == F_p_min(1)),:); p_Target(1,:) = Target(find(F(1,:) == F_p_min(1)),:); all_Vehicle = p_Vehicle(find(F_p_min==F_min(1)),:); all_Target = p_Target(find(F_p_min==F_min(1)),:); % 迭代 for i = 2:iter 更新F(i,:) F_p_min(i) = min(F(i,:)); F_min(i) = min(F_p_min); p_Vehicle(i,:) = Vehicle(min(find(F(i,:) == F_p_min(i))),:); p_Target(i,:) = Target(min(find(F(i,:) == F_p_min(i))),:); all_Vehicle = p_Vehicle(min(find(F_p_min==F_min(i))),:); all_Target = p_Target(min(find(F_p_min==F_min(i))),:); end r_min = 1.5; % 最大转弯半径 v0 = 100; % 无人机速度 V1 = sum(V1_0); V2 = max(V2_0) / v0; F = A * V1 + B * V2; 4.输出结果
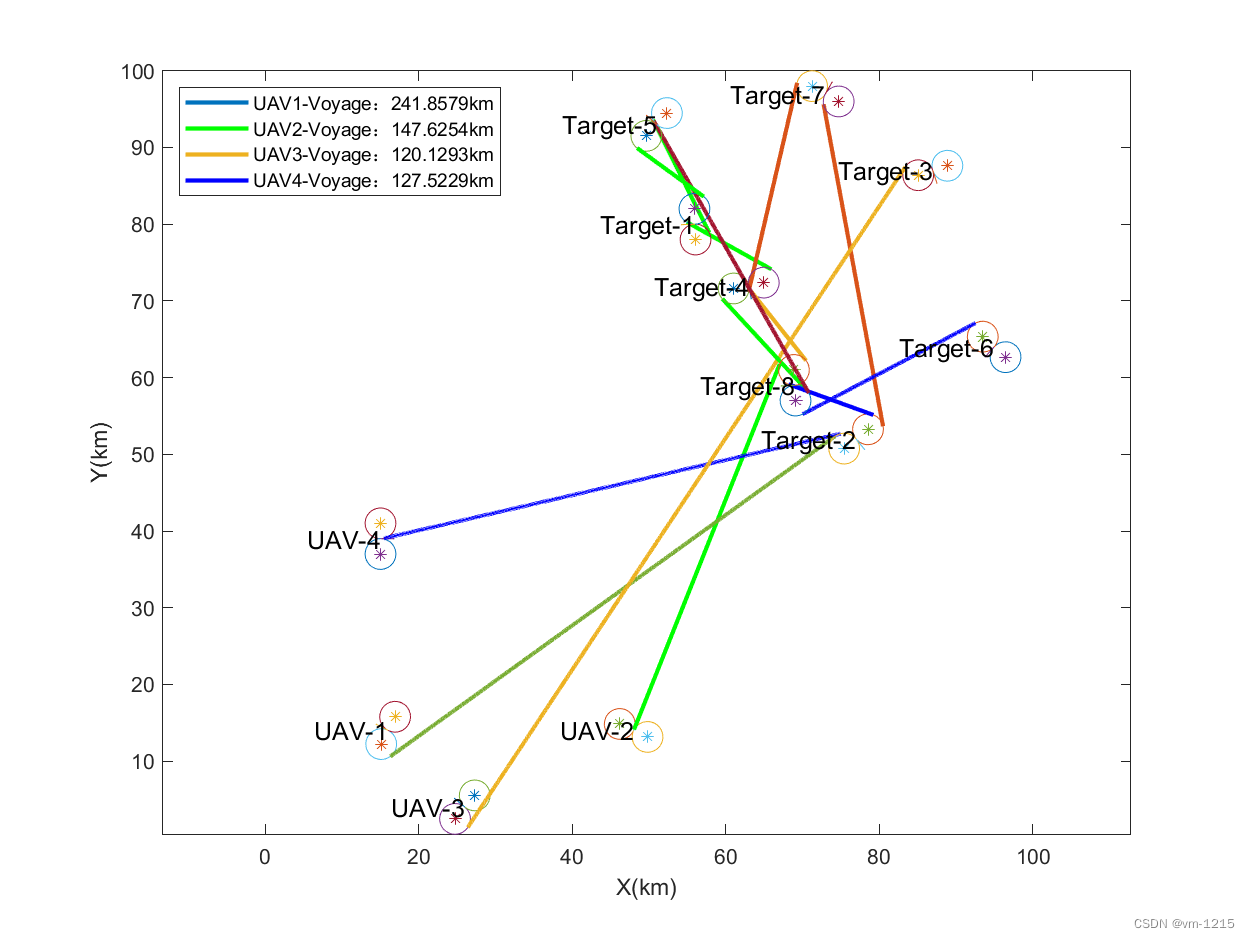
粒子群规模1000 迭代次数100 The initial position and orientation of the UAVS: (X,Y,D) UAV1: 16 14 153 UAV2: 48 14 65 ... Location of target: (X,Y,D) Target1: 56 80 182 Target2: 77 52 309 ... The path of the UAVS UAV1: (Target 2,Task 1)--(Target 2,Task 2)--(Target 7,Task 1)--(Target 7,Task 2)--(Target 7,Task 3)--(Target 4,Task 2)--(Target 4,Task 3)--(Target 8,Task 3)--(Target 5,Task 3) ... The voyage of the UAVS UAV1: 241.8579km UAV2: 147.6254km UAV3: 120.1293km ... 代码不易,请点赞+收藏 A资源说明.rar - 蓝奏云
A资源-UAV.rar - 蓝奏云 【若觉文章质量良好且有用,请别忘了点赞收藏加关注,这将是我继续分享的动力,万分感谢!】
|
【本文地址】
今日新闻 |
推荐新闻 |