【MATLAB编程实战】自动控制仿真实验 |
您所在的位置:网站首页 › matlab在频率法中的应用 › 【MATLAB编程实战】自动控制仿真实验 |
【MATLAB编程实战】自动控制仿真实验
|
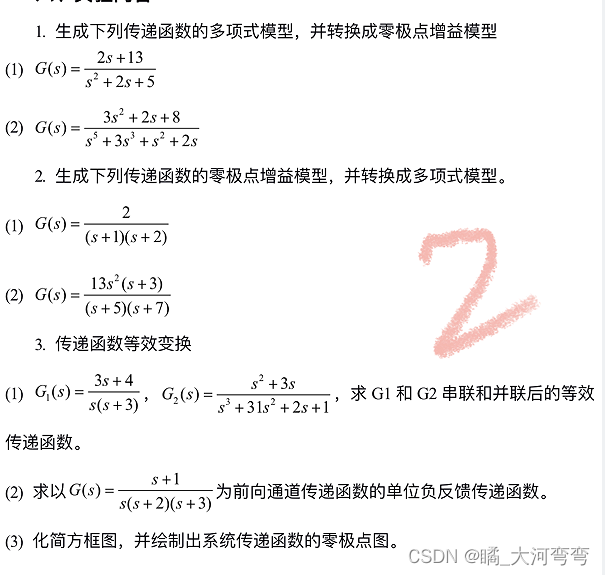
欢迎关注,本专栏主要更新MATLAB仿真、界面、基础编程、画图、算法、矩阵处理等操作,拥有丰富的实例练习代码,欢迎订阅该专栏!(等该专栏建设成熟后将开始收费,快快上车吧~~) 【MATLAB编程实战】自动控制仿真实验——控制系统数学模型、时域分析、拉普拉斯变换、Simulink、根轨迹分析、频率特性及线性矫正 控制系统数学模型这部分主要有一下的几个模块,要给谁根据多项式模型写为零极点增益模型,一个是根据零极点增益模型转换为多项式模型,还有就是传递函数的等效变换,下面是一个例子:
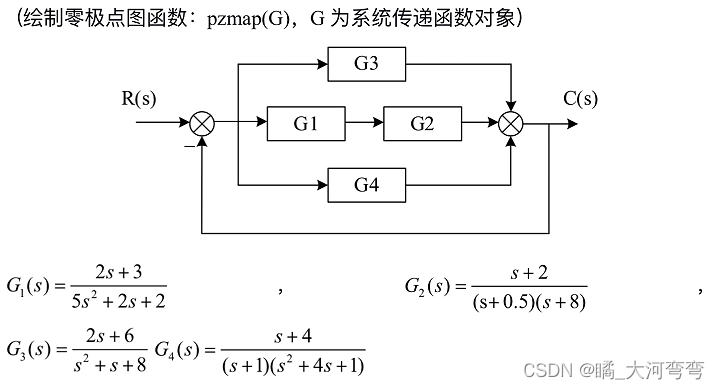
对于第二个问题的代码如下: clc; clear; k1 = 2; z = []; p = [-1;-2]; zpG1 = zpk(z,p,k1) G1 = tf(zpG1) k2 =13; z = [0;0;-3]; p=[-5;-7]; zpG2 = zpk(z,p,k2) G2 = tf(zpG2)对于第三个问题的代码结果为: 其代码如下: clc; clear; num1 = [3 4]; den1 = [1 3 0]; G1 = tf(num1,den1) num2 = [1 3 0]; den2 = [1 31 2 1]; G2 = tf(num2,den2) %串联 G3 = series(G1,G2) %并联 G4 = parallel(G1,G2) %2.单位反馈 k=1; num3 = [1 1]; den3 = [1 5 6 0]; [num4,den4] = cloop(num3,den3); G5 = tf(num4,den4) %3.化简方框图 clear; num1 = [2 3]; den1 = [5 2 2]; G1 = tf(num1,den1); num2 = [1 2]; den2 = [1 8.5,4]; G2 = tf(num2,den2); num3 = [2 6]; den3 = [1 1 8]; G3 = tf(num3,den3); num4 = [1 4]; den4 = [1 5 5 1]; G4 = tf(num4,den4); [num12,den12] = series(num1,den1,num2,den2); [num123,den123] = parallel(num12,den12,num3,den3); [numG0,denG0] = parallel(num123,den123,num4,den4) [numGs,denGs] = cloop(numG0,denG0); G = tf(numGs,denGs) zplane(numGs,denGs) 时域分析问题
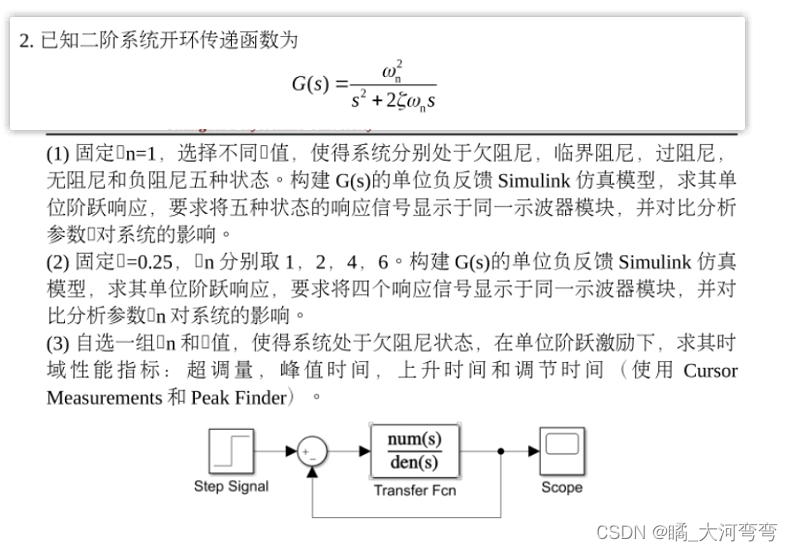
第二问的代码如下: clc; clear; syms a s b w Lf1 = a; Lf2 = s; Lf3 = 1/(s+a)*(s+b); Lf4 = s/(s+a)*(s+b); Lf5 = 1/(s^2*(s+a)); Lf6 =(s+a)/((s+a)^2+w^2); Lf7 = w/((s+a)^2+w^2); f1 = simplify(ilaplace(Lf1)) f2 = simplify(ilaplace(Lf2)) f3 = simplify(ilaplace(Lf3)) f4 = simplify(ilaplace(Lf4)) f5 = simplify(ilaplace(Lf5)) f6 = simplify(ilaplace(Lf6)) f7 = simplify(ilaplace(Lf7))第三问代码如下: clc; clear; syms s R = 1/s; G = (s^2 + 4*s + 6)/(s+1)^3; C = R*G; ct = simplify(ilaplace(C)) %2.部分展开法 clear; syms s %下面的这个,已经乘单位阶跃响应了 num1 = [1 -2]; den1 = [1 3 3 1 0]; G = tf(num1,den1) [r,p,k]=residue(num1,den1) %根据结果知G = 2/s+1 + 2/(s+1)^2 + 3/(s+1)^3 - 2/s; G = 2/(s+1) + 2/(s+1)^2 + 3/(s+1)^3 - 2/s; ct = simplify(ilaplace(G))对于第四问的代码给出下载链接(创作不易,还望海涵) 下载链接 4.标准二阶系统传递函数为 C(s)_ (s)= Ps-s+2Z,s +w 求: (1)当r(t)=Eu(t),利用拉式逆变换函数求c(t),u(t)为单位阶跃函数;(2)在同一图中绘制在不同参数下的单位阶跃响应。 参数∶E=1(即单位阶跃响应),自然振荡角频率wn=3,阻尼比et=0.1,0.3,0.707,1.2要求:加图题,坐标轴名称,图例(gtext),网格(grid命令) 提示:1)先定义t s E wn et符号变量再构建传递函数; 3)第二问绘制单位阶跃响应时,时间采样点t=0:0.02:10; 4)第二问将参数值带入后求出输出ct,注意点乘的使用,使用plot(t,ct);hold on绘图; 5)带入不同阻尼比参数时,可以使用for循环或者 while循环。 其结果图为:
1.已知一阶系统传递函数为 G(s)= ’ s+1 输入为正弦信号sin(t),求其输出响应。要求∶输入、输出信号绘制于同一图中,附图例。
结果图如图所示:
文件内容: 结果如下:
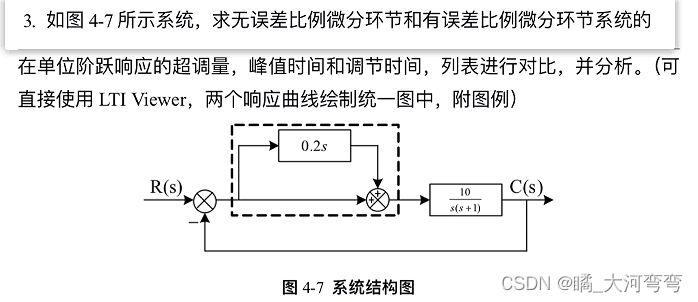
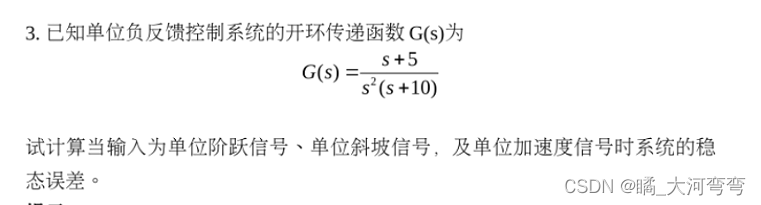
其中m4_3.m就是准备系统的,然后打开了LTI view: clc; clear; num1 = [10]; den1 = [1 1 0]; num2 = [2]; den2 = [1 1]; [num1,den1] = cloop(num1,den1); [num2,den2] = cloop(num2,den2); G1 = tf(num1,den1); G2 = tf(num2,den2); ltiview视频中给出了LTI view的使用的方式。 系统单位相应的稳态误差
代码下载链接 实验结果如图所示:
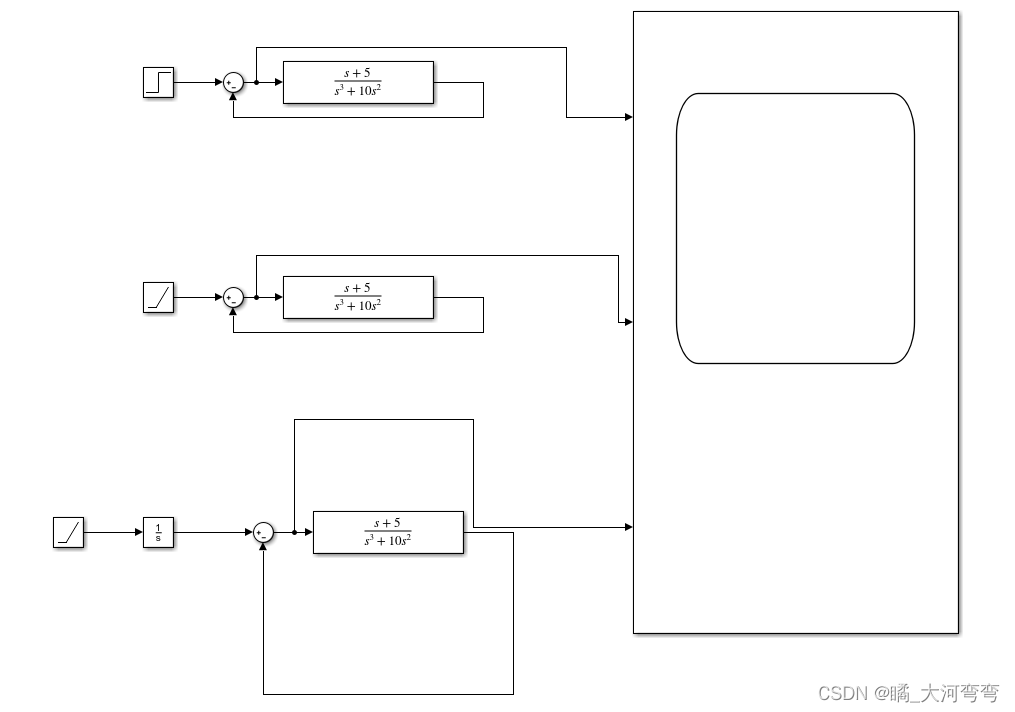
仿真下载链接 仿真如下图所示,跟着搭建就行其实也:
|
 对于第一个问题的代码如下:
对于第一个问题的代码如下: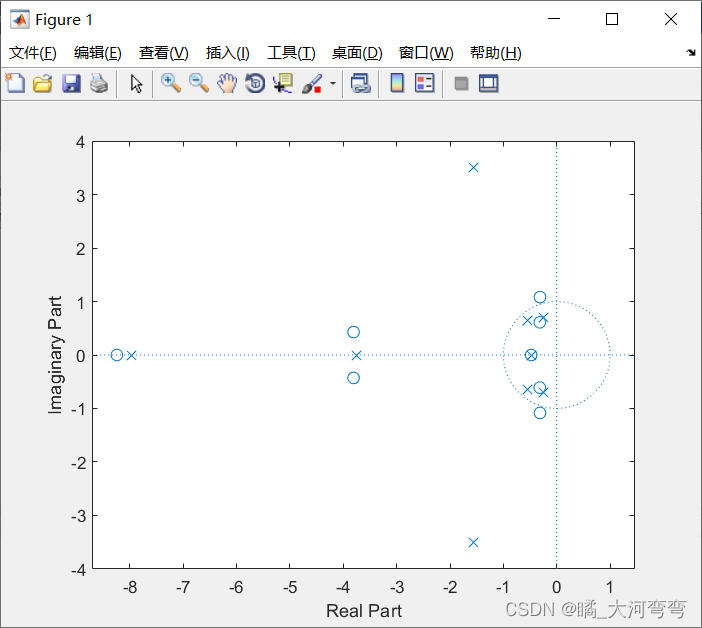

 对于问题1的代码如下:
对于问题1的代码如下: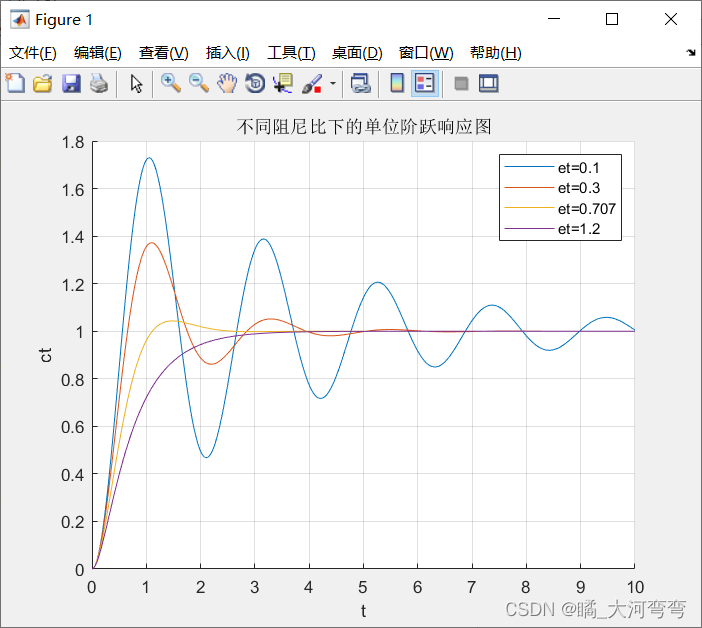
 代码下载
代码下载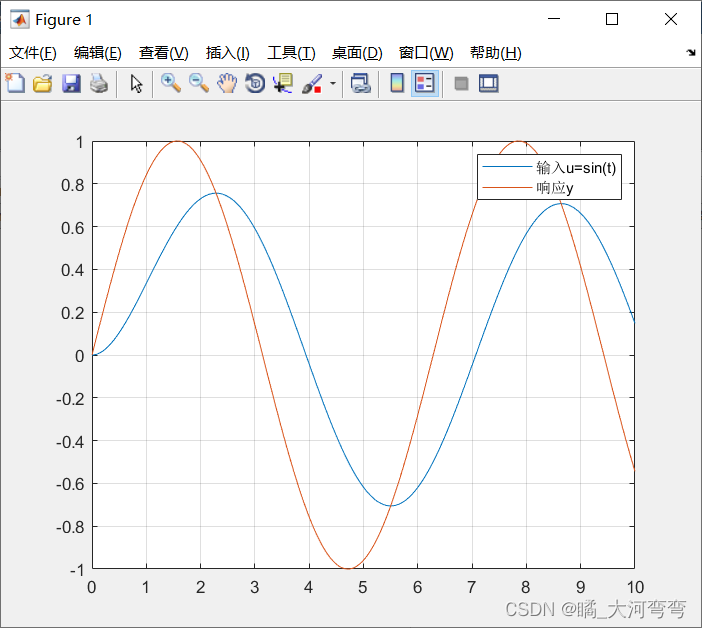
 文件下载链接
文件下载链接
 文件下载链接 文件内容:
文件下载链接 文件内容: 
 simulink图如下,直接跟着simulink搭建即可: 或者点击这里直接下载
simulink图如下,直接跟着simulink搭建即可: 或者点击这里直接下载 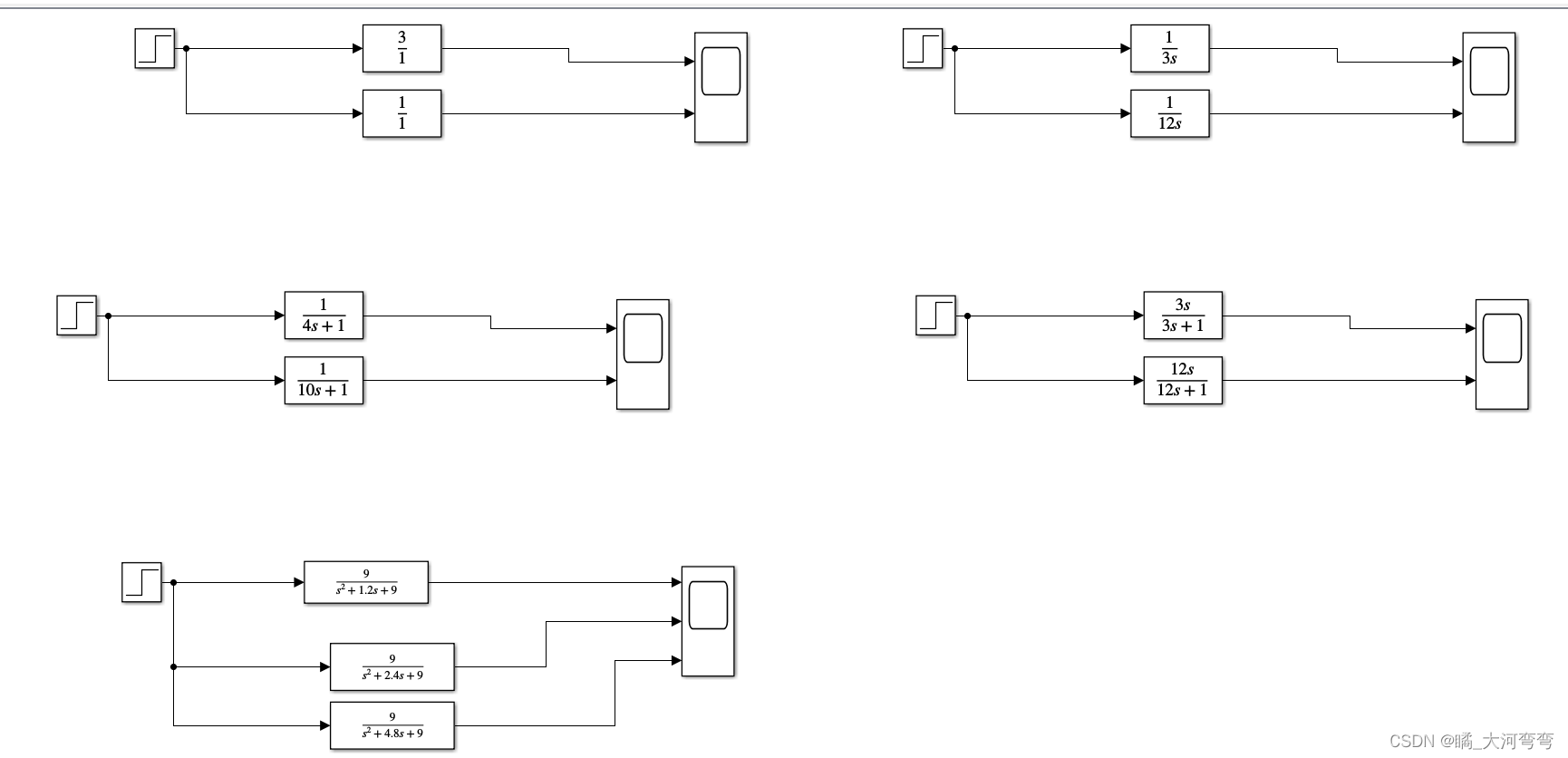 仿真结果部分如下:
仿真结果部分如下: 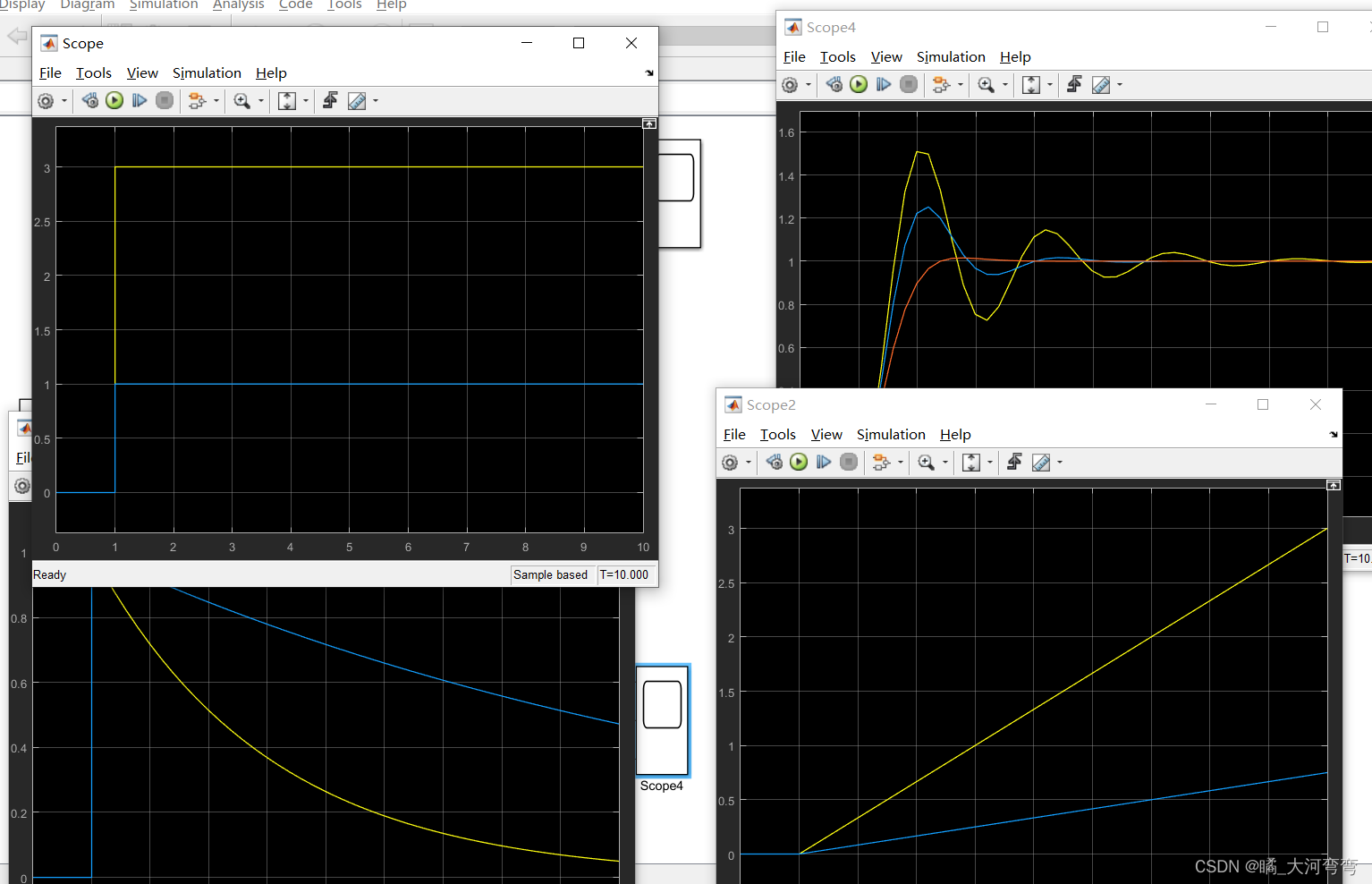
 仿真下载链接 仿真如下图所示,跟着搭建就行其实也:
仿真下载链接 仿真如下图所示,跟着搭建就行其实也:  结果所示:
结果所示: 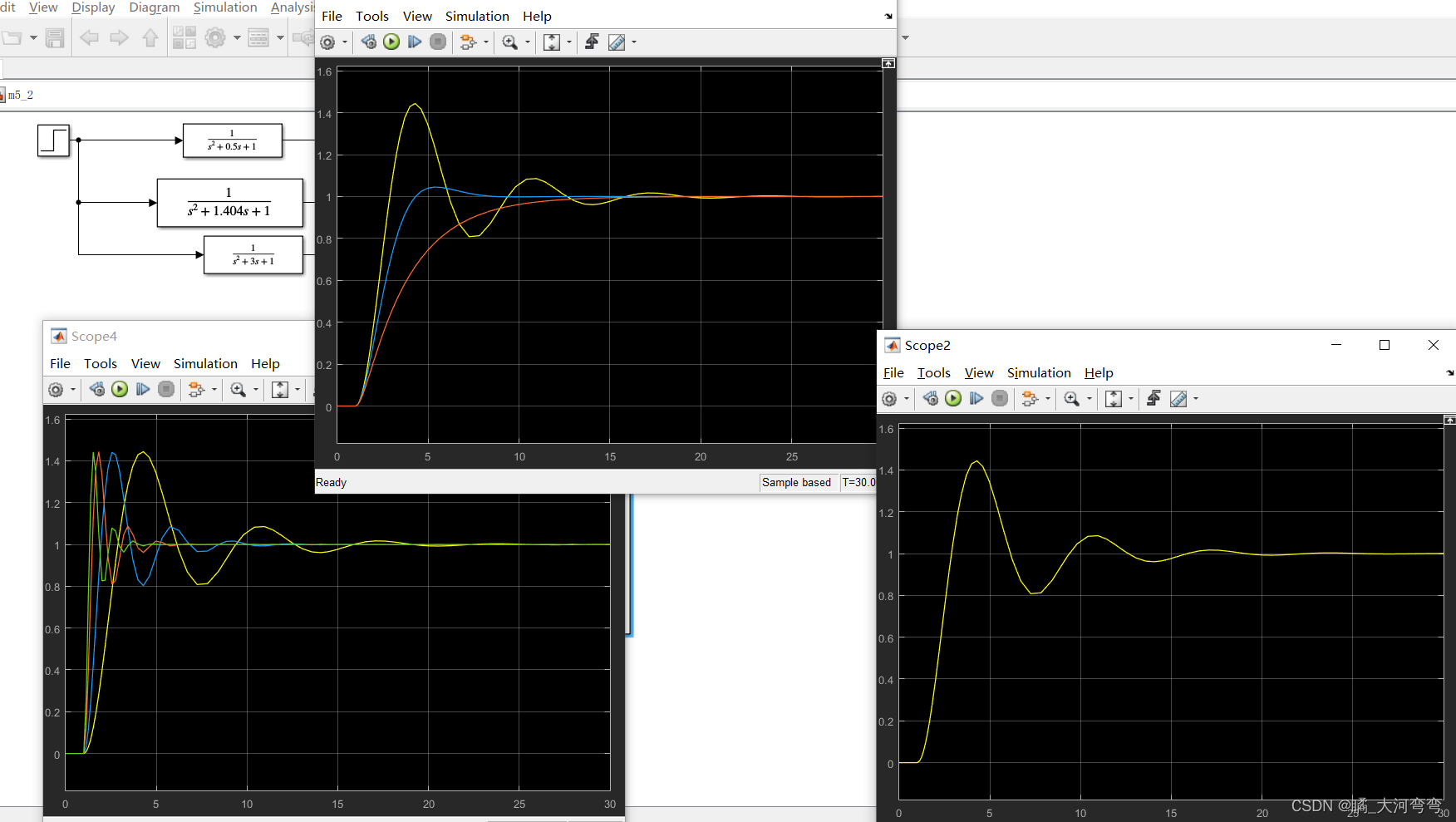
 结果所示:
结果所示: 
【本文地址】