【自控】控制系统时域分析(4)系统稳态误差 |
您所在的位置:网站首页 › k与实验装置的什么几何参数有关如何提高k › 【自控】控制系统时域分析(4)系统稳态误差 |
【自控】控制系统时域分析(4)系统稳态误差
|
控制系统的稳态误差,是系统控制精度的一种度量,称为稳态性能指标。一个控制系统,只有在满足要求的控制精度前提下,才有实际工程意义。系统的误差e(t)一般定义为被控量的希望值与实际值之差。即误差 e(t)=被控量的希望值-被控量的实际值
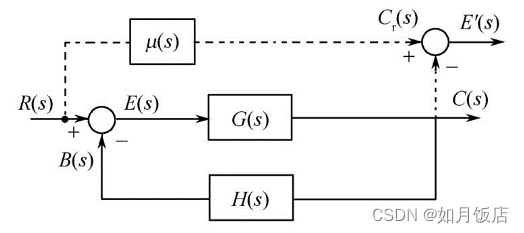
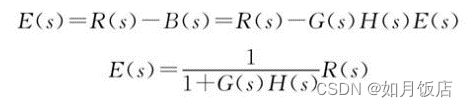
把系统的输入信号r(t)作为被控量的希望值,而把主反馈信号b(t)(通常是被控量的测量值)作为被控量的实际值,定义误差为
这种定义下的误差在实际系统中是可以测量的,且具有一定的物理含义。通常该误差信号也称为控制系统的偏差信号。
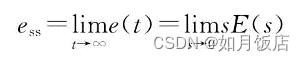
误差响应e(t)与系统输出响应c(t)一样,也包含暂态分量和稳态分量两部分,对于一个稳定系统,暂态分量随着时间的推移逐渐消失,而我们主要关心的是控制系统平稳以后的误差,即系统误差响应的稳态分量——稳态误差,记为ess。研究系统稳定性时关注的是系统的暂态响应(零输入响应),而研究系统的稳态误差时关注的是系统的稳态响应(零状态响应)。定义系统的稳态误差为稳定系统误差响应e(t)的终值。当时间t趋于无穷时,e(t)的极限存在,则稳态误差为
系统的稳态误差取决于哪些方面? 根据误差和稳态误差的定义,系统误差e(t)的像函数
定义
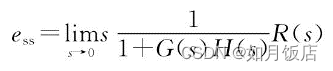
为系统对输入信号的误差传递函数。 由拉普拉斯变换的终值定理,系统的稳态误差为
代入E(s)表达式得
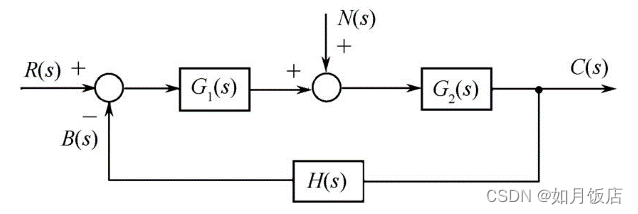
可以得出两点结论: (1)稳态误差与系统输入信号r(t)的形式有关; (2)稳态误差与系统的结构及参数有关。 对于线性系统,响应具有叠加性,不同输入信号作用于系统产生的误差等于每一个输入信号单独作用时产生的误差的叠加。对于如图所示的系统,给定信号r(t)和扰动信号n(t)同时作用于系统。
(1)给定信号r(t)单独作用下,误差er(t)=r(t)-b(t),则
稳态误差essr为
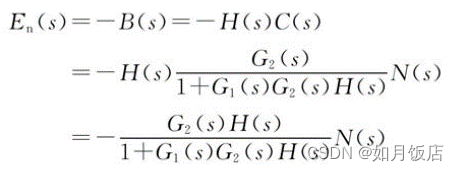
(2)扰动信号单独作用下,误差en(t)=-b(t),则
稳态误差
定义
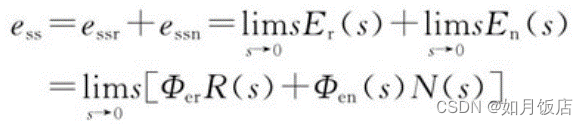
为系统对扰动信号的误差传递函数。 控制系统在给定信号r(t)和扰动信号n(t)同时作用下的稳态误差ess为
应用静态误差系数计算给定信号作用下的稳态误差 从稳态误差的表达式可知,系统的稳态误差不仅与输入信号r(t)的形式有关,而且与系统开环传递函数G(s)H(s)有关。 系统的类型 系统的开环传递函数G(s)H(s)可表示为
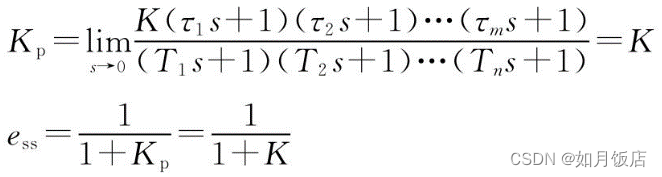
式中,K为开环增益(开环放大倍数);τj(j=1,2,…,m)和Ti(i=1,2,…,n)为时间常数;ν为积分环节个数(开环系统在坐标原点的重极点数)。系统常按开环传递函数中所含有的积分环节个数ν来分类。把ν=0,1,2,…的系统,分别称为0型、Ⅰ型、Ⅱ型等系统。开环传递函数中的其他零、极点,对系统的类型没有影响。典型输入信号作用下,系统的稳态误差可用误差系数表示。 静态位置误差系数Kp 当系统的输入为单位阶跃信号r(t)=1(t)时,系统稳态误差为
式中
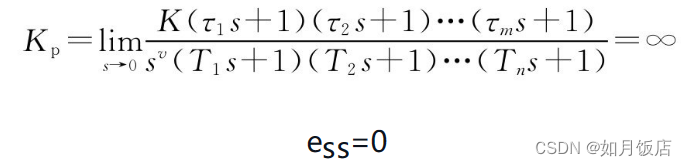
Kp定义为系统静态位置误差系数。 对于0型系统
对于Ⅰ型或高于Ⅰ型以上系统有
从而可以得出结论: (1)Kp的大小反映了系统在阶跃输入下消除误差的能力,Kp越大,稳态误差越小; (2)0型系统对阶跃输入引起的稳态误差为一常值,其大小与K有关,K越大,ess越小,但总有差,所以把0型系统常称为有差系统; (3)在阶跃输入时,若要求系统稳态误差为零,则系统至少为Ⅰ型或高于Ⅰ型的系统。 静态速度误差系数Kv 当系统的输入为单位斜坡信号时,r(t)=t 1(t),即R(s)=1/s2,则系统稳态误差为
式中,
Kv定义为系统静态速度误差系数。 对于0型系统
对于Ⅰ型系统
对于Ⅱ型或Ⅱ型以上系统
由上述结果可得: (1)Kv的大小反映了系统跟踪斜坡输入信号的能力,Kv越大,系统稳态误差越小; (2)0型系统在稳态时,无法跟踪斜坡输入信号; (3)Ⅰ型系统在稳态时,输出与输入在速度上相等,但有一个与K成反比的常值位置误差; (4)Ⅱ型或Ⅱ型以上系统在稳态时,可完全跟踪斜坡信号。 静态加速度误差系数 Ka当系统输入为单位加速度信号时,即r(t)=0.5t2 1(t),即R(s)=1/s3 ,则系统稳态误差为
式中,
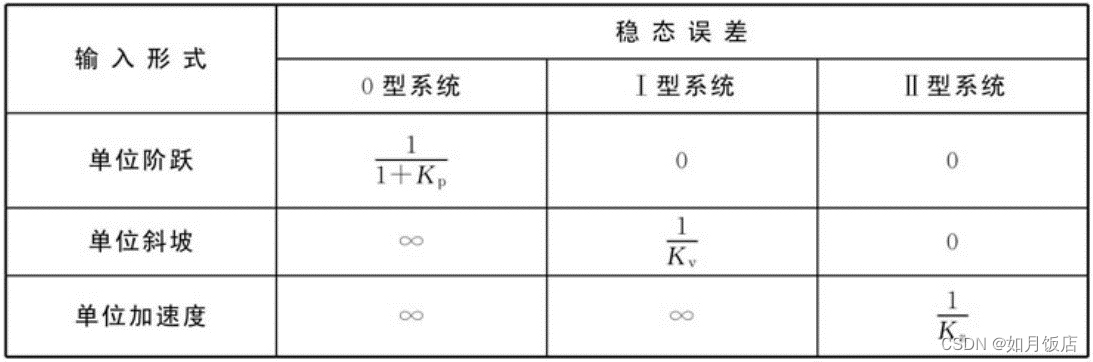
定义为系统静态加速度误差系数。 对于0型系统,Ka=0,ess=∞; 对于Ⅰ型系统,Ka=0,ess=∞; 对于Ⅱ型系统,Ka=K,ess=1/K; 对于Ⅲ型或Ⅲ型以上系统,Ka=∞,ess=0。 上述分析表明: (1)Ka的大小反映了系统跟踪加速度输入信号的能力,Ka越大,系统跟踪精度越高; (2)Ⅱ型以下的系统输出不能跟踪加速度输入信号,在跟踪过程中误差越来越大,稳态时达到无限大; (3)Ⅱ型系统能跟踪加速度输入,但有一常值误差,其大小与K成反比;(4)要想准确跟踪加速度输入,系统应为Ⅲ型或高于Ⅲ型的系统。 该表概括了0型、Ⅰ型和Ⅱ型系统在各种输入作用下的稳态误差。在对角线以上,稳态误差为0;在对角线以下,稳态误差则为无穷大。
静态误差系数Kp,Kv,Ka反映了系统消除稳态误差的能力,系统型号越高,消除稳态误差的能力越强,但仅通过增加积分环节提高型号,易导致系统结构不稳定。注意,稳态误差系数法仅适用于给定信号
作用下求稳态误差。另外,上述稳态误差中的K必须是系统的开环增益(或开环放大倍数)。当系统输入信号为几种典型输入信号的线性组合时,可利用叠加原理求出系统的总稳态误差。 扰动信号作用下的稳态误差与系统结构的关系 扰动信号n(t)作用下的系统结构图如图所示。
扰动信号n(t)作用下的误差函数为
若
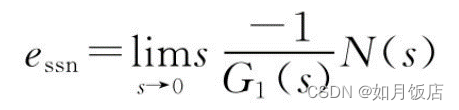
则上式可近似为
例如,G1(s)=K1,G2(s)=K2/s(Ts+1),H(s)=1/s,N(s)=1/s 则系统由扰动产生的稳态误差为
扰动作用点之前的增益K1越大,扰动产生的稳态误差越小,而稳态误差与扰动作用点之后的增益K2无关。若给控制器加一个积分,即G1(s)=K1/s。则由扰动产生的稳态误差变为
由以上分析可知,扰动信号作用下产生的稳态误差essn除了与扰动信号的形式有关外,还与扰动作用点之前(扰动点与误差点之间)的传递函数(控制器)的结构及参数有关,但与扰动作用点之后(被控系统)的传递函数无关。 改善系统稳态精度的途径有哪些? (1)提高系统的型号或增大系统的开环增益,可以保证系统对给定信号的跟踪能力。但同时会带来系统稳定性变差,甚至导致系统不稳定。 (2)增大误差信号与扰动作用点之间前向通道的开环增益或积分环节的个数,可以降低扰动信号引起的稳态误差。但同样也有稳定性问题。 |



















【本文地址】
今日新闻 |
推荐新闻 |