Policy gradient(策略梯度详解) |
您所在的位置:网站首页 › ie的目标是什么 › Policy gradient(策略梯度详解) |
Policy gradient(策略梯度详解)
|
文章目录
策略梯度基本知识什么是策略梯度?强化学习案例
策略梯度公式详解如何使你的损失函数更好增加一个基准为每一个action分配不同的权重
策略梯度基本知识
什么是策略梯度?
直接根据状态输出动作或者动作的概率。那么怎么输出呢,最简单的就是使用神经网络啦!我们使用神经网络输入当前的状态,网络就可以输出我们在这个状态下采取每个动作的概率,那么网络应该如何训练来实现最终的收敛呢?我们之前在训练神经网络时,使用最多的方法就是反向传播算法,我们需要一个误差函数,通过梯度下降来使我们的损失最小。但对于强化学习来说,我们不知道动作的正确与否,只能通过奖励值来判断这个动作的相对好坏。基于上面的想法,我们有个非常简单的想法:如果一个动作得到的reward多,那么我们就使其出现的概率增加,如果一个动作得到的reward少,我们就使其出现的概率减小。 强化学习案例在强化学习中,环境与rewardnfunction你是不能控制的,玩video game时,环境就是你的游戏机,然后reword function就是得分规则,你所能改的只有actor。下围棋也类似。
那么这个Actor的损失函数该怎么定义呢?给定一个actor,记为Π,然后下表θ代表该神经网络的参数,然后input的s就是机器所看到的场景,然后让机器实际去玩一下这个游戏,然后我们要求总的Total reward最大,我们就要将所有的r加起来。但由于即使是使用相同的actor,每一次的总的奖励也可能不同,于是我们就求总的奖励的期望即可。 下面的这图看起来不就是一个巨大的network吗?然后环境和reward是无法改变的,就相当于下棋的时候机器无法控制对手的操作,机器也无法改变奖励制度,唯一能改变的就是自己的参数,去适应环境,来使奖励最大化。
求最大你会想到梯度上升的求法,这里的梯度上升是策略梯度的一部分。 那么对Rθ期望求微分具体应该怎么做呢?如下图,R(┏)肯定不可微,但是没关系,它的表达式里没有θ,所以我只需对P(┏|θ)求导数,然后我们要对其做一下变换,巧用log!!然后画红框的两部分之前推导过可以化为1/N,然后整个表达式就可以化为一个近似的表达式。使用Πθ这个神经网络去玩N次游戏,可以得到N个┏ 下面我们来看看更新model的过程,先是给了一个actor,然后给actor一个┏,然后算出奖励总和,然后用梯度上升,更新θ,然后再将另一个┏传给actor,循环往复执行。 那么这里有一个问题,我们看下图,ideal case的第一张图,a和c的会使总的奖励变多,那么机器会倾向于执行a和c的操作,所以a和c的执行几率就变大了,相对的b的几率就减少了。然后我们再看看sampling那一行,b和c可能使我的总的奖励一直是正的,那么机器根本就不知道a的情况,万一a的操作更好呢??机器只会去学更positive的,b和c的几率也会越来越大,a只会越来越小。这时,我们需要引入一个baseline,如下图的b,我们将总的奖励减去一个b值,也就是某一步的奖励一定要达到某一个标准我才能说它好,否则就是不好。通常我们可以将这个b设为与R(┏)的期望接近的值。 比如下面是一个简单的游戏,就三步,第一组(s,a)得到的奖励是+5,第二组是0,第三组是-2,然后最后的奖励是+3,如果我们用之前的那个损失函数,那么就默认了每一个(s,a)的组合的权重都是+3,这显然是不靠谱的,虽然总的奖励是正的,但是明显里面有些组合不靠谱,我们就可以给那些不靠谱的组合负的权重。于是我们将R(┏n)换成下图的样子。这样就可以对每一个组合的权重加以区分。 |
 神经网络的输入是机器观察到的场景转化的向量或者矩阵,输出是每一个行为的概率。像这种彩图我们一般用CNN,然后取代了最早的查表方式,以前的actor是table,然后遇到某张图片就去table里找对应的行为,用在下棋里还可能穷举,如果在自动驾驶领域,这图片是无法用表存完的。可能你之前没有给神经网络看过某张图,但是它还是能得出比较靠谱的结果,所以他具有generalization的特性。
神经网络的输入是机器观察到的场景转化的向量或者矩阵,输出是每一个行为的概率。像这种彩图我们一般用CNN,然后取代了最早的查表方式,以前的actor是table,然后遇到某张图片就去table里找对应的行为,用在下棋里还可能穷举,如果在自动驾驶领域,这图片是无法用表存完的。可能你之前没有给神经网络看过某张图,但是它还是能得出比较靠谱的结果,所以他具有generalization的特性。  机器先观察画面,然后做出了一个action,向右移动,这个action的奖励是0,然后机器又观察画面,做出了开火的action,然后观察画面,发现有外星人被击落,然后获得reward。
机器先观察画面,然后做出了一个action,向右移动,这个action的奖励是0,然后机器又观察画面,做出了开火的action,然后观察画面,发现有外星人被击落,然后获得reward。  从游戏开始到游戏结束被称为一个episode,那么机器就是要找到每一个episode中,谁的reward总和最大,然后总和最大的reward的episode所包含的各个action是比较好的!
从游戏开始到游戏结束被称为一个episode,那么机器就是要找到每一个episode中,谁的reward总和最大,然后总和最大的reward的episode所包含的各个action是比较好的!
 ┏是场景,行动,奖励所组成的向量,如下图所示,比如说玩游戏,一个┏就代表了机器看到了第一个画面,做了某个行为,然后得到什么奖励,然后看到第二个画面,做了某个行为,然后得到什么奖励,以此类推,循环往复,直到游戏结束。然后每一个┏都有可能被经历。当你选择了某一个actor,也就是选择了某一个神经网络,那么会使某一些┏容易出现,某一些不容易出现。那么Rθ的期望就等于每一次游戏过程┏的奖励R与该过程┏出现的几率的乘积之和。那么穷举所有的┏显然不可能,那么我们就玩N场游戏,相当于N个训练数据。
┏是场景,行动,奖励所组成的向量,如下图所示,比如说玩游戏,一个┏就代表了机器看到了第一个画面,做了某个行为,然后得到什么奖励,然后看到第二个画面,做了某个行为,然后得到什么奖励,以此类推,循环往复,直到游戏结束。然后每一个┏都有可能被经历。当你选择了某一个actor,也就是选择了某一个神经网络,那么会使某一些┏容易出现,某一些不容易出现。那么Rθ的期望就等于每一次游戏过程┏的奖励R与该过程┏出现的几率的乘积之和。那么穷举所有的┏显然不可能,那么我们就玩N场游戏,相当于N个训练数据。 
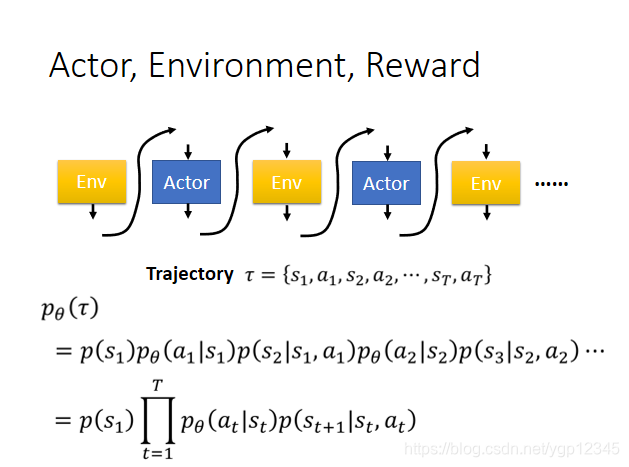 下面我们来看看P(┏|θ)打开是什么,画黄线的部分与你的actor无关,取决于外部环境,也就是游戏,然后红线部分与你的actor有关。
下面我们来看看P(┏|θ)打开是什么,画黄线的部分与你的actor无关,取决于外部环境,也就是游戏,然后红线部分与你的actor有关。 


 利用上述打开的结论,然后我们利用对数的性质化简,如下图所示:然后我们对θ求导!忽视与θ无关的项。然后得出来一个等式。
利用上述打开的结论,然后我们利用对数的性质化简,如下图所示:然后我们对θ求导!忽视与θ无关的项。然后得出来一个等式。  然后我们将Rθ得期望求导之后得算式写出来,如下图:其中,log里面的那个p所代表的意思就是当前第n回玩游戏时,t时刻机器所看到的画面的情况下做出a行为的概率,R(┏n)是指第n回完游戏时的总的奖励,然后利用上述得到的结果进行梯度上升。注意:如果我将R(┏n)换成rtn,也就是将第n回玩游戏的总的奖励换成第n回玩游戏时t时刻的奖励,那么会发生什么后果??如果在刚刚那个射击游戏里,只有开火能得到奖励,那么就会导致机器只会开火。 如果在某一次玩游戏时,机器在看到某个场景时,采取了一个行动,然后总的奖励是正的,那么机器就会自己去增加看到这个场景下做出该行动的概率。
然后我们将Rθ得期望求导之后得算式写出来,如下图:其中,log里面的那个p所代表的意思就是当前第n回玩游戏时,t时刻机器所看到的画面的情况下做出a行为的概率,R(┏n)是指第n回完游戏时的总的奖励,然后利用上述得到的结果进行梯度上升。注意:如果我将R(┏n)换成rtn,也就是将第n回玩游戏的总的奖励换成第n回玩游戏时t时刻的奖励,那么会发生什么后果??如果在刚刚那个射击游戏里,只有开火能得到奖励,那么就会导致机器只会开火。 如果在某一次玩游戏时,机器在看到某个场景时,采取了一个行动,然后总的奖励是正的,那么机器就会自己去增加看到这个场景下做出该行动的概率。 


 同时,我们再增加一个衰减因子γ,意味着随着时间推移,组合越来越多,那么前面的组合对很后面的组合的影响就越来越小。然后我们将红框框住的那部分重新命名一个函数,叫Advantage function
同时,我们再增加一个衰减因子γ,意味着随着时间推移,组合越来越多,那么前面的组合对很后面的组合的影响就越来越小。然后我们将红框框住的那部分重新命名一个函数,叫Advantage function 
【本文地址】
今日新闻 |
推荐新闻 |