ABB机器人的DSQC1030IO板配置方法 |
您所在的位置:网站首页 › abb机器人dsqc1030接线 › ABB机器人的DSQC1030IO板配置方法 |
ABB机器人的DSQC1030IO板配置方法
|
ABB机器人的DSQC1030IO板配置方法 1、ABB机器人新版本系统RobotWare6.08开始用DSQC1030替代传统的DSQC652IO板。
2、DSQC1030现在使用的是EthernetIP协议,机器人不需要额外配置选项。如果机器人需要做主站连接其他EthernetIP从站或者机器人做EthernetIP从站连接其他设备主站,还需要购买选项841—1EthernetIP Scanner/Adapter。 3、硬件连接,出厂会默认把X5网口(设备底部)和控制器X4 LAN2口上,硬件*上端的X4为设备供电,默认已经从X31引电过来; X1为数字输出,其中PWR DO接24V,GND DO接0V,需要单独接电(也可从XT31引电),也就是之前的DSQC652的9和10针脚。 X2为数字输入,其中GND DI为DI的0V,需要单独接电(也可从XT31引电)
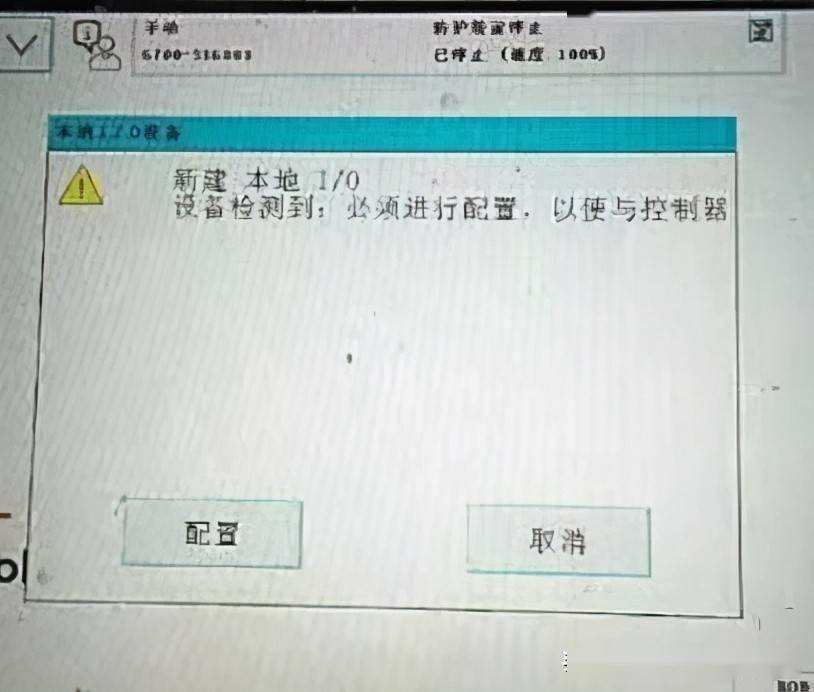
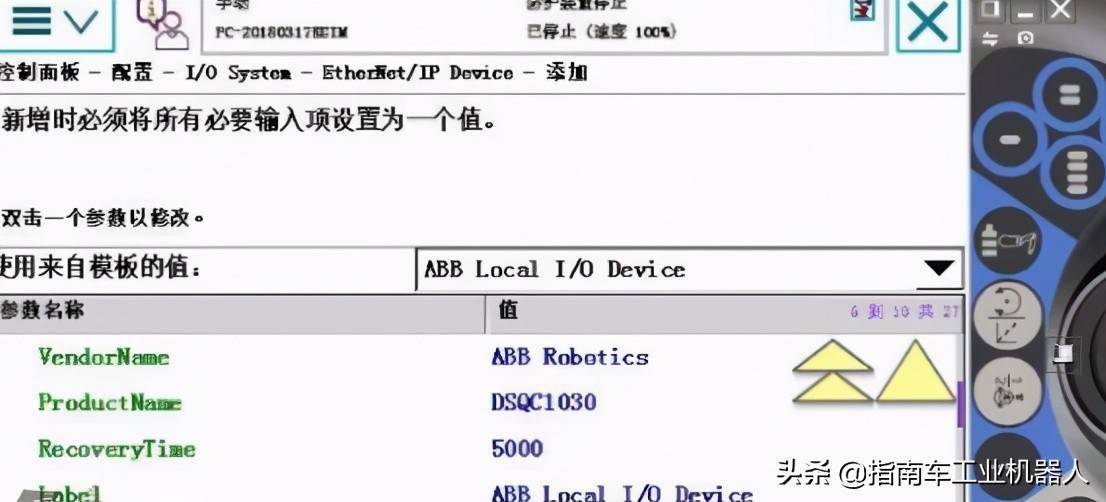
根据提示点击配置,重启后就自动分配16个DI和16个DO. 展开全文如果开机错过了配置提示画面,我们可以通过控制面板-配置-I/O-EthernetIP,点击添加,选择ABB LOCAL I/O,然后地址Address改为192.168.125.100
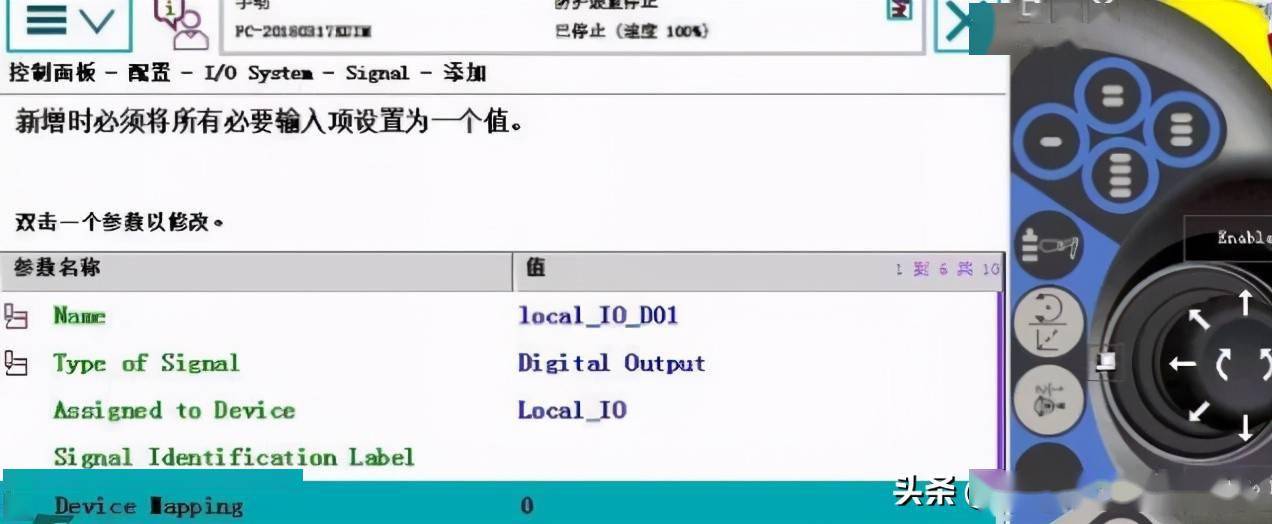
接着添加IO和之前创建IO信号一样,DO1地0,DO2地址1.依次类推DO16地址15,DI也是如此。
责任编辑: |

 返回搜狐,查看更多
返回搜狐,查看更多【本文地址】
今日新闻 |
推荐新闻 |