在VM12虚拟机+安装Ubuntu18.04+搭建ROS系统教程(超详细图文) |
您所在的位置:网站首页 › 装虚拟机需要多大硬盘 › 在VM12虚拟机+安装Ubuntu18.04+搭建ROS系统教程(超详细图文) |
在VM12虚拟机+安装Ubuntu18.04+搭建ROS系统教程(超详细图文)
|
在VM12虚拟机上安装Ubuntu18.04后再搭建ROS系统教程(超详细吐血整理)——含各种避坑tips
学习前言step1:安装Ubuntu18.041.**下载Ubuntu18.04镜像地址:(64位)**
step2:配置Ubuntu18.0410.安装VM tools安装vm tools会出现的错误:
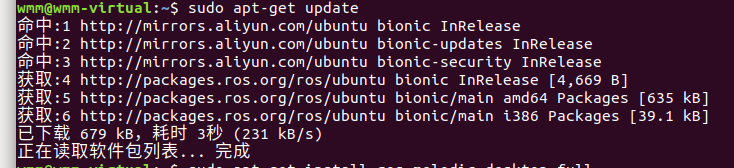
step3.搭建ROS平台1.换成国内源错误1.下载软件仓库信息失败,
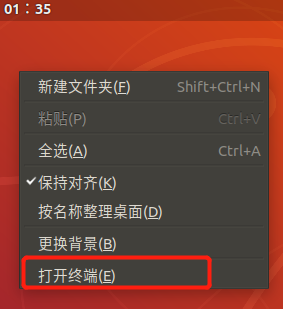
ROS源设置1.桌面打开终端2.设置source.list3.设置密钥4.更新源5.ROS桌面完整版安装6.设置环境变量7.安装依赖8.测试ROS是否安装
到这里系统就安装完成啦,其他的创建功能包什么的,去b站看古月居或者奥特学园的视频教程就好啦 ~ 第一次安装会出现各种毛病,多试几次就好了,U盘常备Ubuntu系统镜像~ ~
学习前言
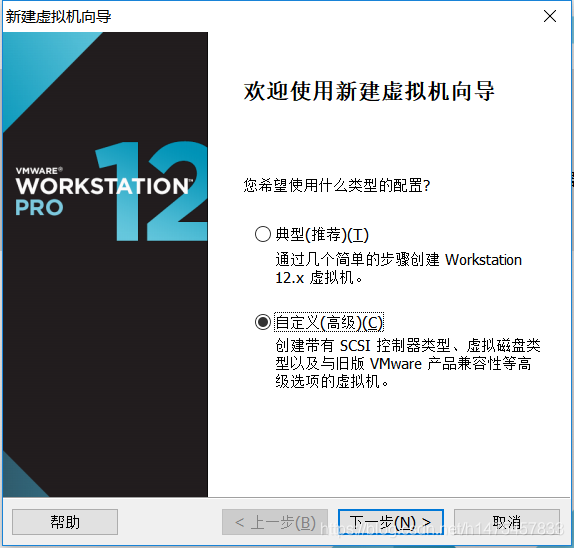
这是我,经历了九九八十一难,遇上各种百度的到或百度不到的问题,最终经过一个白天加一个通宵在Ubuntu环境下搭建的ROS系统[磨人小妖精] 惨痛经历。知无不言言无不尽~~ 第一次写博文,觉得不错的话就给我点赞哦~ VM的安装我会后续完善,现在先看安装步骤。 1.下载Ubuntu18.04镜像地址:(64位)32位的同学应该很少了叭? 迅雷地址:http://ubuntu.mirrors.pair.com/releases/18.04.4/ubuntu-18.04.4-desktop-amd64.iso(打开迅雷,复制链接就自动下载了。如果没有就手动导入链接,这个省略= =) 百度网盘:暂时没有。个人建议大文件下载不要用百度网盘,具体原因你们懂的。 下载好了的亚子: 打开VM12,创建新的虚拟机。
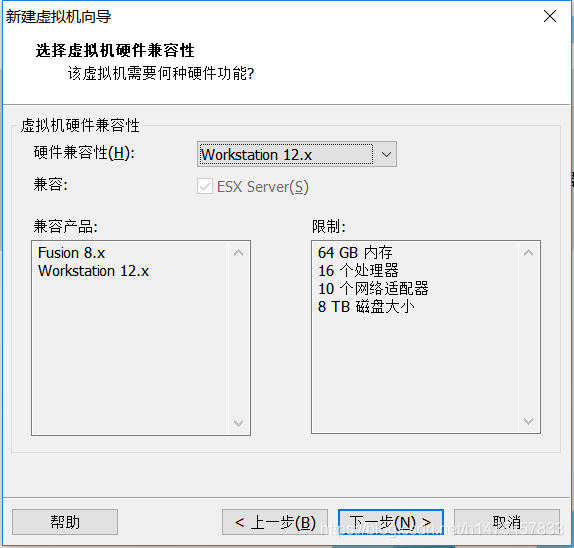
5.硬件兼容选择:workstation 12.x,然后下一步
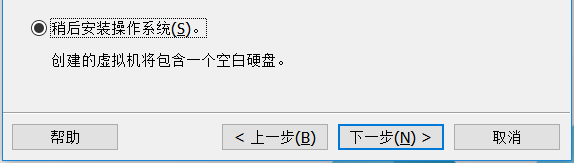
6.点击稍后安装 与上同理,个人习惯可以选别的,
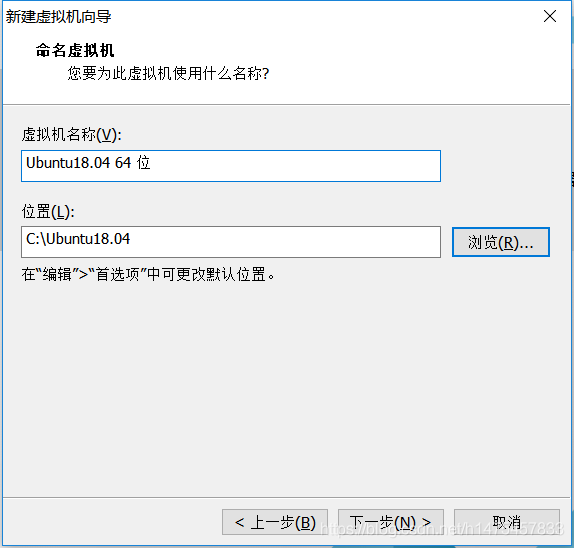
7.强调!!!要想不被气死就得装在C盘,U盘和移动硬盘都会特别卡。 给虚拟机命名 ~我想起名为:磨人的小妖精,但我得严肃,咳咳 在C盘新建一文件夹~方便以后管理(被气的时候删除)
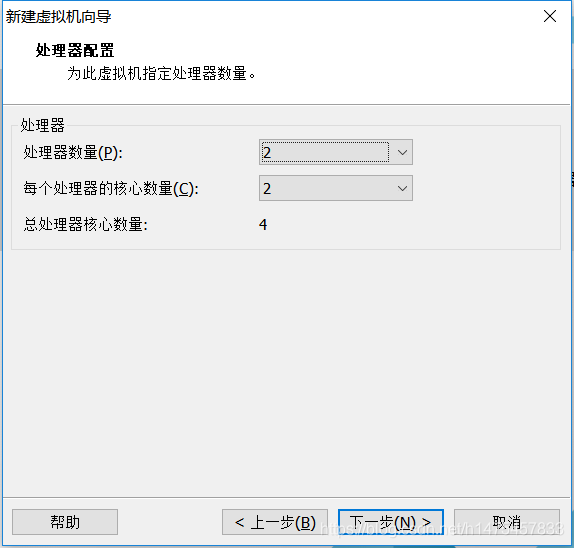
8.处理器核数选择,我的电脑是八核所以忍痛割爱分给它4核。同学们可以设置成1核,因为后续可以改~
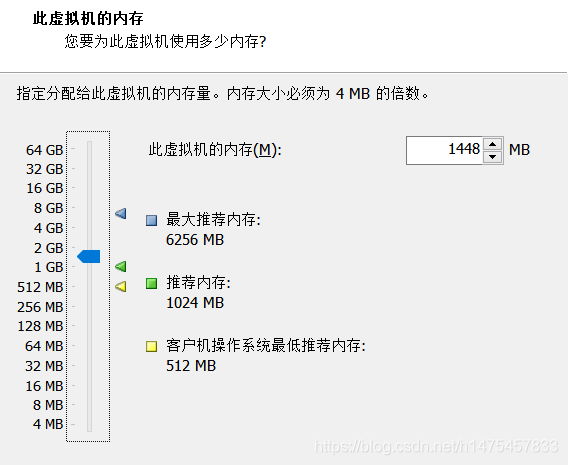
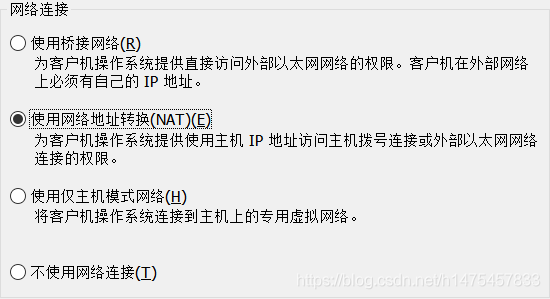
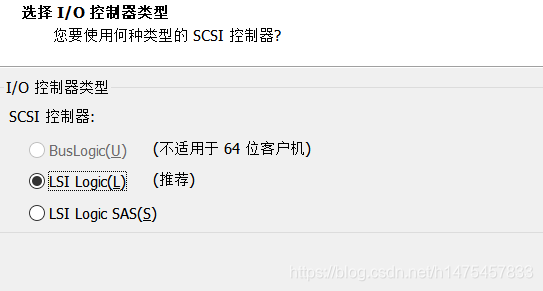
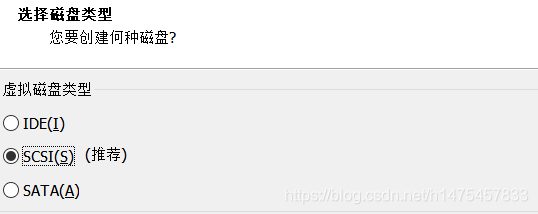
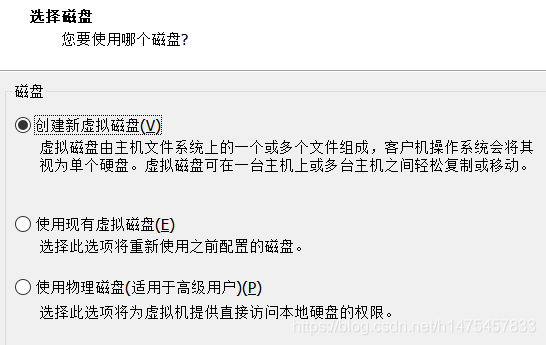
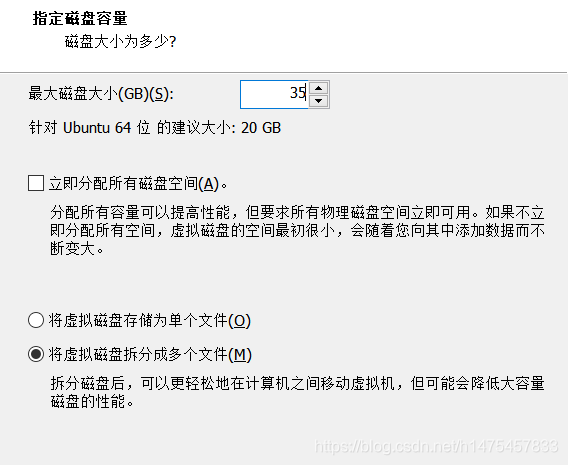
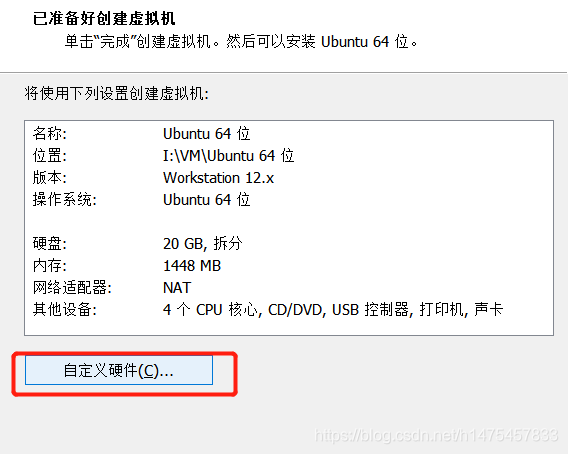
9.虚拟机内存,我选择1.4G,因为Ubuntu和ROS要想流畅,最低要求是1G运存。 10.网络类型:桥接, 为了可以愉快的上网(ROS系统得通过指令在线下载安装) 图中不小心选错了!!!大家选第一个就好! 11.这俩个选择推荐的就好了 12.创建新的虚拟硬盘 13.磁盘容量建议20GB以上,因为后续安装了ROS的功能包之后,20G可能不够用。我C盘内存不够,所以选择35G。 14.磁盘文件名,可改可不。 15.自定义配置
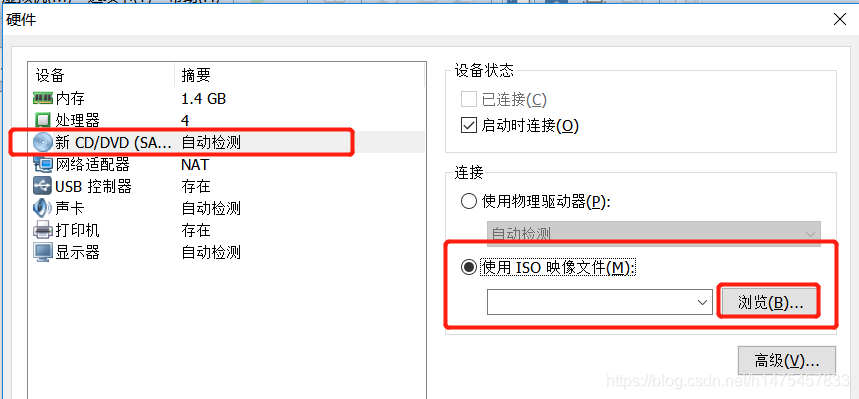
16.导入镜像文件
1.打开Ubuntu(“继续运行此虚拟机”)
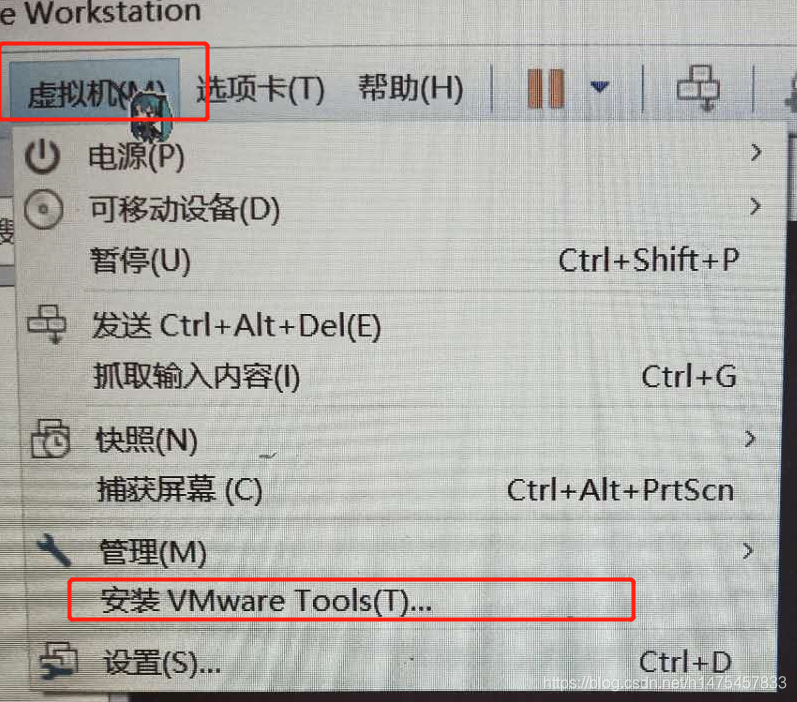
重启后~ 这个tool是方便我们在客户机和物理机之间复制粘贴的小工具~~ 之后桌面会出现一个DVD样式驱动,双击
输入后回车 在下图含有“ifconfig”的指令中,填ss(可做可不做的一步,不做好像也没影响。参考B站up主:古月居——《ROS入门21讲》第2节///传送门:Bv12t411G7Vn) 填好后继续回车~回车 ~
【文章参考:https://blog.csdn.net/Franticquanshi/article/details/81348796】 !!安装好后要重启一下
在新建的文件夹下右键打开终端,在所在的文件夹进行sudo su 操作(root)后,在进行rm -Rf /etc/vmware-tools操作///**【文章参考:https://blog.csdn.net/weixin_42738495/article/details/86498032 】 sudo su rm -Rf /etc/vmware-tools
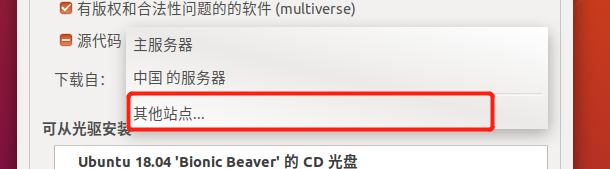
参考链接:【https://blog.csdn.net/weixin_43729409/article/details/104032985 】 ROS源设置【文章参考:https://blog.csdn.net/weixin_44791964/article/details/103303827 】 【文章参考:https://blog.csdn.net/sinat_34130812/article/details/81666728 】 1.桌面打开终端
接收ROS源,我用的是清华源 sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
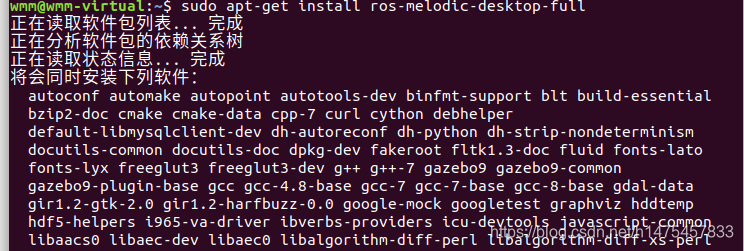
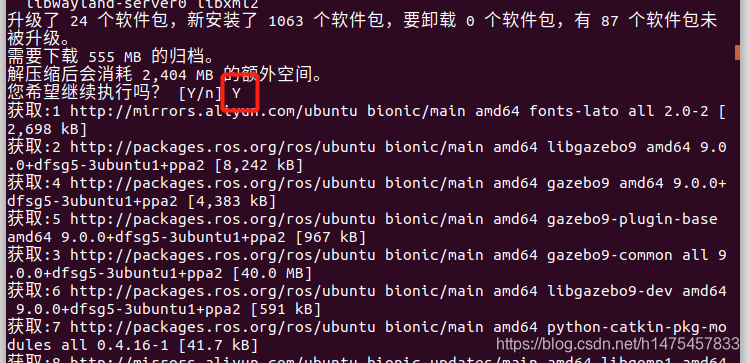
sudo是强制执行的意思,单纯的 apt-get 可能无法安装 sudo apt-get install ros-melodic-desktop-full
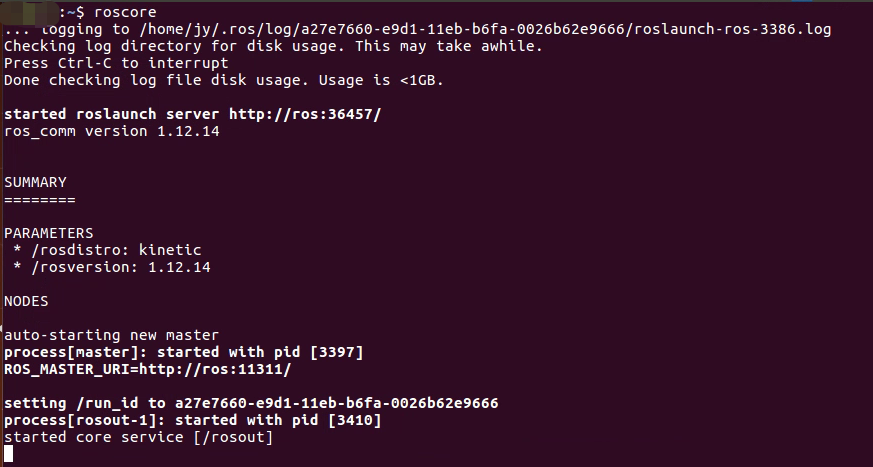
$ source 是编译环境变量 7.安装依赖有助于开发者更好使用ROS系统里的功能 sudo apt install python-rosinstall python-rosinstall-generator python-wstool build-essential 8.测试ROS是否安装CTRL+ALT+T打开终端(Termial),初始化ROS环境: roscore会显示一些版本信息,以及内存缓存是否大于1 G 的这种信息(内存大于1G需要清理缓存) |



 客户机操作系统选Linux,版本选64位
客户机操作系统选Linux,版本选64位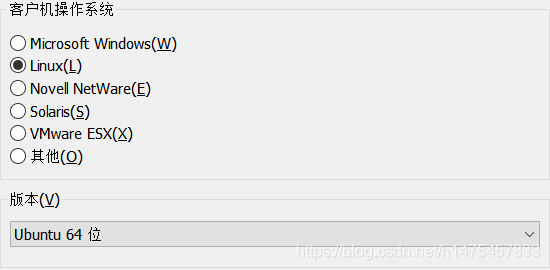
 选择你刚刚用了n久下载的镜像文件 点击打开
选择你刚刚用了n久下载的镜像文件 点击打开  然后关闭
然后关闭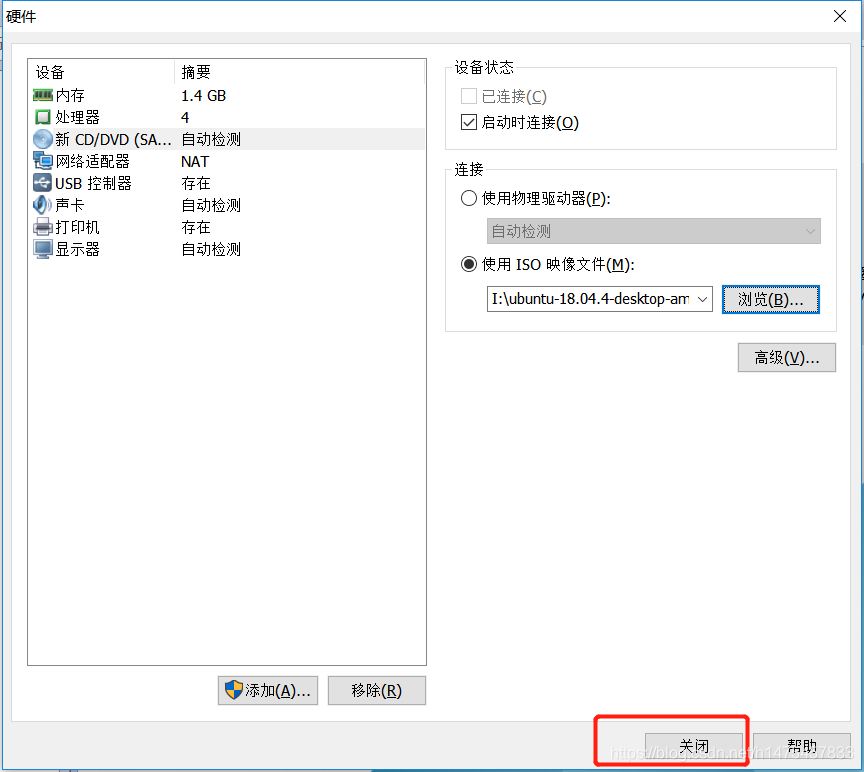 17.点击完成
17.点击完成
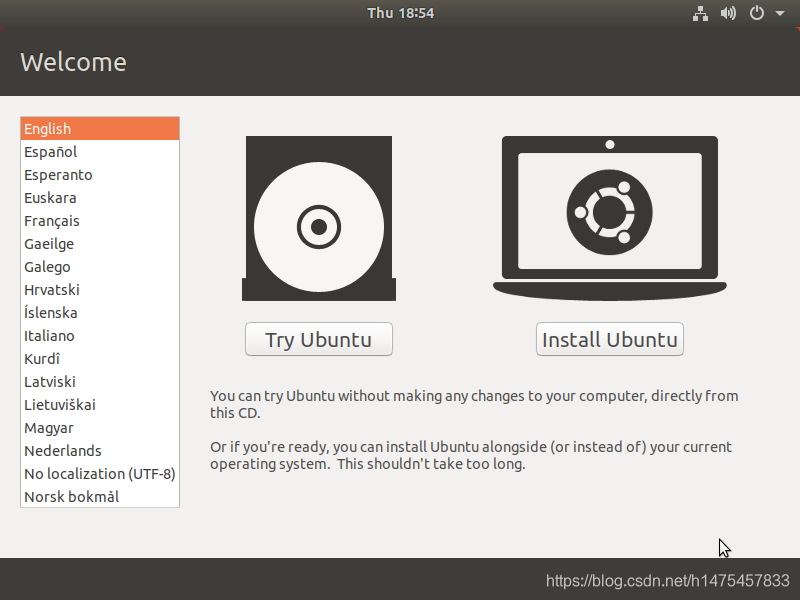 2.语言选择:我选中文,因为我怕英文不好看不懂错误在哪。英语阅读很好的同学可以直接选择English~ 然后安装Ubuntu~
2.语言选择:我选中文,因为我怕英文不好看不懂错误在哪。英语阅读很好的同学可以直接选择English~ 然后安装Ubuntu~ 3.键盘布局,我是默认。 点击继续
3.键盘布局,我是默认。 点击继续  4.这两个默认,继续
4.这两个默认,继续  现在安装~
现在安装~  5.
5.  6.选择区域,中国地图随便点~~都是你的
6.选择区域,中国地图随便点~~都是你的  7.配置用户名和密码
7.配置用户名和密码  我懒得输密码所以选择了自动登陆~
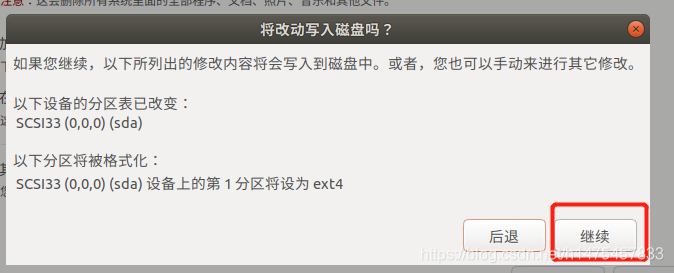
我懒得输密码所以选择了自动登陆~  8.安装中~耐心等待$ v $ 需要下载文件 **(如果下载特别慢的的话,先改为桥接+复制物理机地址,安装好后再改回NAT)**原理不详,但是下载软件与更新库的时候确实是NAT快点= =
8.安装中~耐心等待$ v $ 需要下载文件 **(如果下载特别慢的的话,先改为桥接+复制物理机地址,安装好后再改回NAT)**原理不详,但是下载软件与更新库的时候确实是NAT快点= = 9.安装后需要重启一下(会有点久)
9.安装后需要重启一下(会有点久) 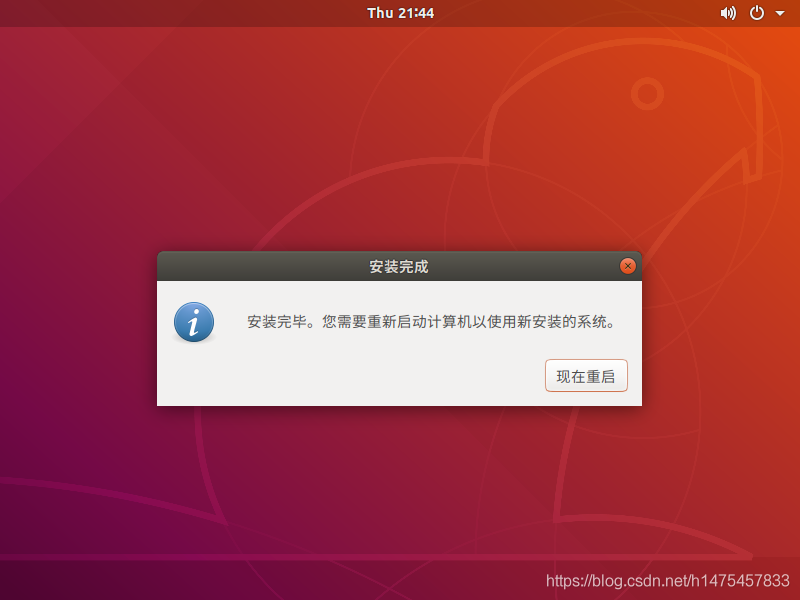 关机后:修改DVD为自动检测,关闭保存~
关机后:修改DVD为自动检测,关闭保存~ 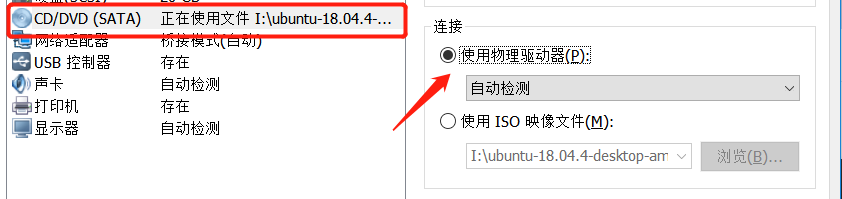
 全都按前进就好了,关闭提醒~
全都按前进就好了,关闭提醒~ 
 会弹出页面,找到后缀名为:tar.gz的压缩包
会弹出页面,找到后缀名为:tar.gz的压缩包 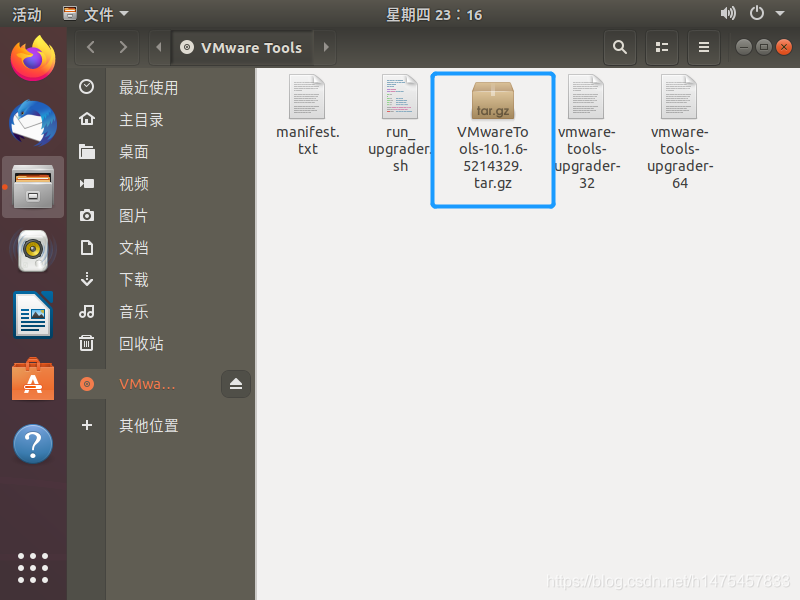 在桌面新建文件夹
在桌面新建文件夹 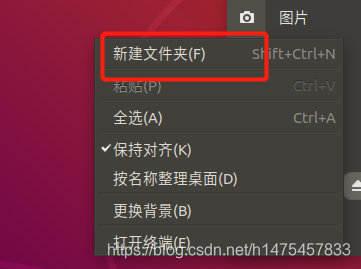
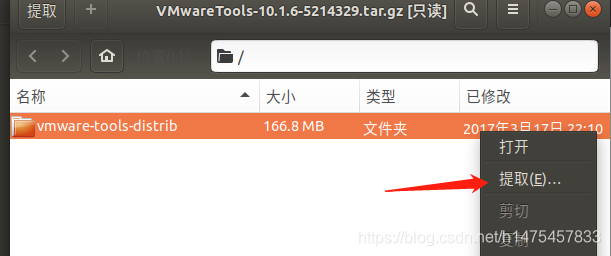
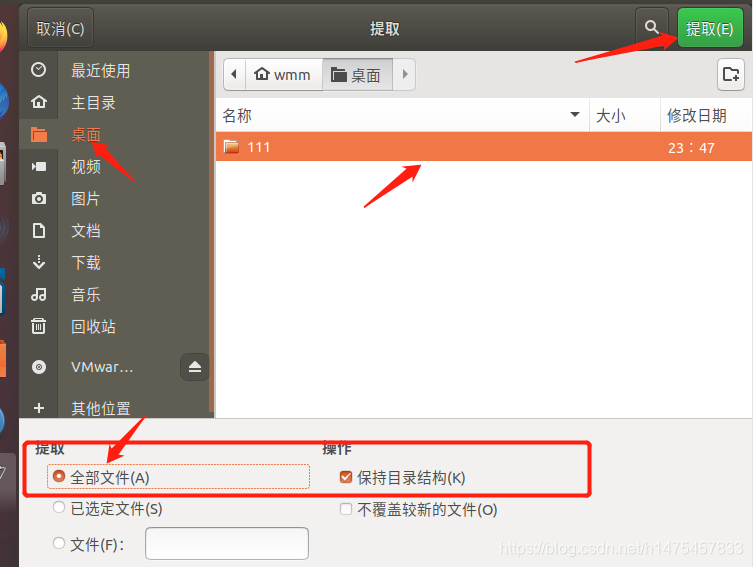
 解压到桌面那个新创建的文件夹,如果此步不能解压该文件的话,要考虑是否是上面步骤的***“将DVD改为自动检测”***步骤没有做到哦
解压到桌面那个新创建的文件夹,如果此步不能解压该文件的话,要考虑是否是上面步骤的***“将DVD改为自动检测”***步骤没有做到哦 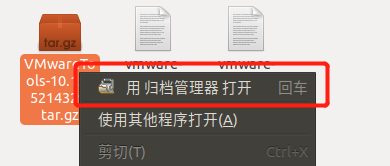
 **安装tools脚本:**先在文件夹下打开一个终端
**安装tools脚本:**先在文件夹下打开一个终端 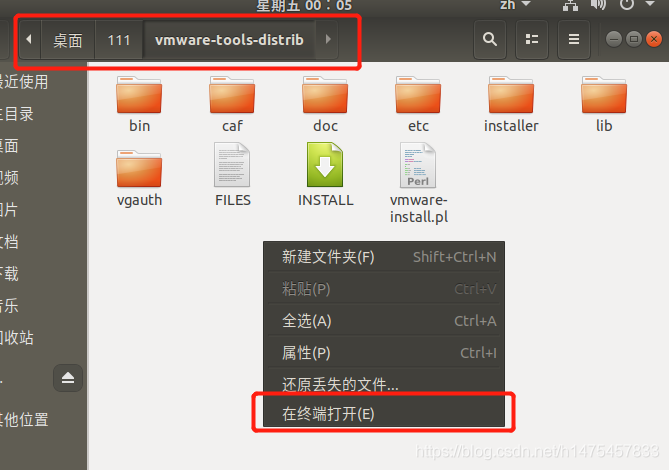 在终端内执行脚本:
在终端内执行脚本: 再回车
再回车  打**“yes”**,然后下面的都是直接回车就好
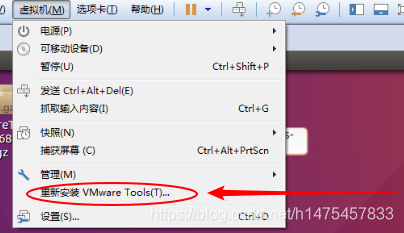
打**“yes”**,然后下面的都是直接回车就好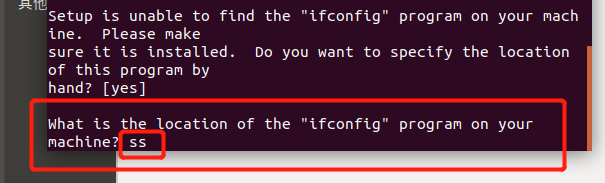 出现enjoy和跳出指令就是已经安装好啦 (检验方法:在虚拟机标题栏,点击后看看是不是出现“重新安装vm tools”是的话就是已经安装完成了~)
出现enjoy和跳出指令就是已经安装好啦 (检验方法:在虚拟机标题栏,点击后看看是不是出现“重新安装vm tools”是的话就是已经安装完成了~)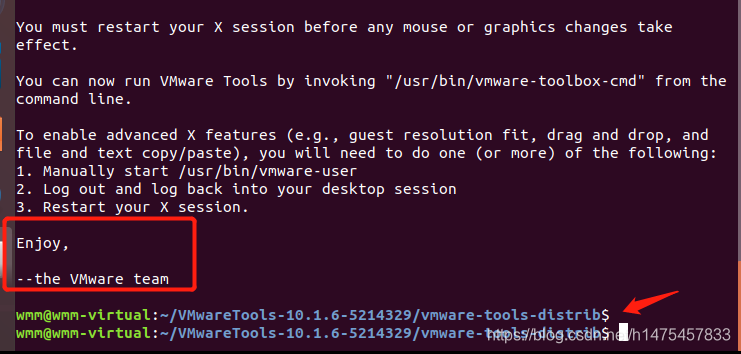

 解决方法:
解决方法:
 修改需要权限,认证一下
修改需要权限,认证一下 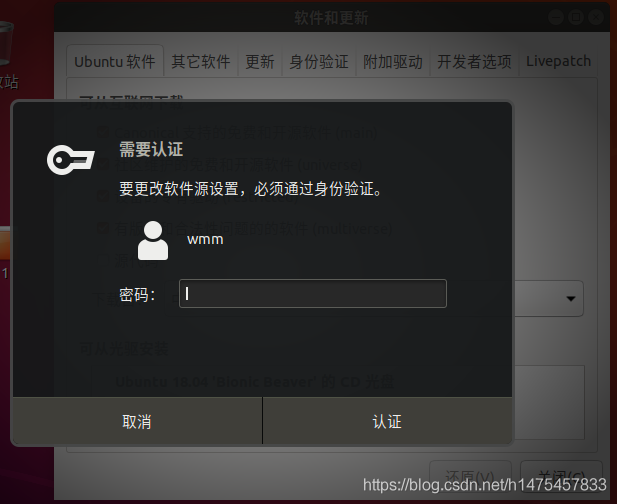 选上
选上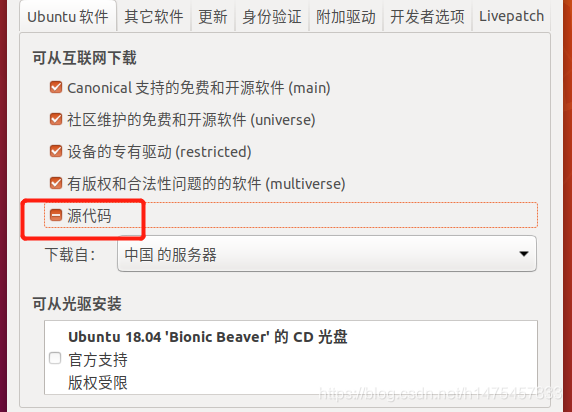
 测试需要一点时间~
测试需要一点时间~ 
 这些不要勾!!
这些不要勾!!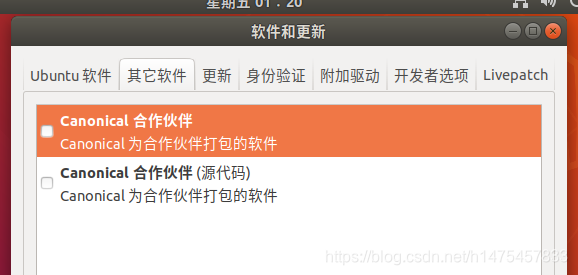
 *还原时要一点时间且*很容易出现错误!如:库安装/更新失败
*还原时要一点时间且*很容易出现错误!如:库安装/更新失败 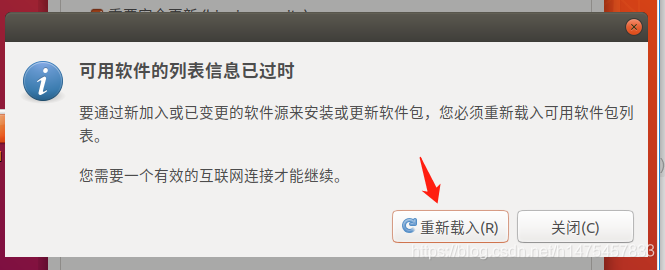


【本文地址】
今日新闻 |
推荐新闻 |