无人机倾斜摄影1:500地形图测绘流程(CC+EPS) |
您所在的位置:网站首页 › 地形测绘图解读 › 无人机倾斜摄影1:500地形图测绘流程(CC+EPS) |
无人机倾斜摄影1:500地形图测绘流程(CC+EPS)
|
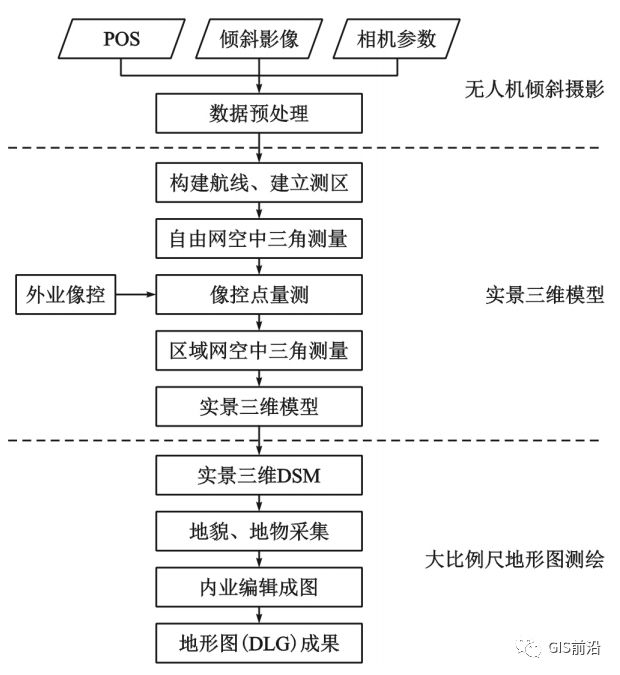
本文通过无人机飞行平台搭载倾斜相机,采用倾斜摄影的方式获取测区的影像数据,利用自动建模的技术构建实景三维模型;在构建的实景三维模型基础上,通过三维立体量测技术,采集地物地貌特征点、线、面,最后通过内业编辑的方式制作地形图,从而省去烦琐的外业调绘工作,为快速制作大比例尺地形图测绘提供一种新的解决方案。基于无人机倾斜摄影的大比例尺地形图测绘技术路线如图2所示。
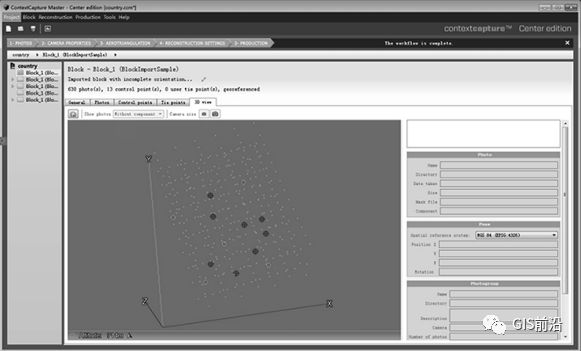
图2 基于无人机倾斜摄影的大比例尺地形图测绘技术路线 3.1实景三维模型 本项目采用5个像控点解算,8个像控点进行精度检查,实景三维建模采用CC( Smart3D)软件进行制作,主要步骤如下: (1)构建工程加载影像数据,设置相机参数,编辑pos数据,引入控制点及检查点数据,建立好Smart3D工程,如图3所示。本项目采用2个相机,需设置2个相机文件,分别有364张和266张影像;原始POS数据坐标系为WGS1984,通过七参数模型及似大地水准面补偿模型转换到西安1980平面、黄海1985高程系统下。采取区域网布点,解算控制点5个,检查控制点8个。图3smart3D工程文件。
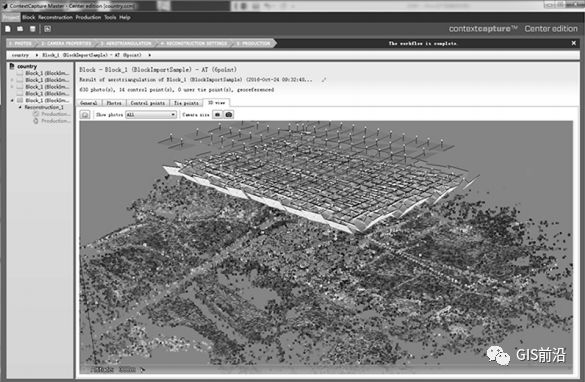
图3 CC(smart3D )工程文件 (2)倾斜摄影空中三角测量如图4所示,本项目采用区域网5点法布点,即四周4个控制点,测区中心1个控制点,用于解算倾斜摄影空中三角测量;同时布设8个检查点以检验空中三角测量的精度。通过空三加密处理,自由网的精度为1.82pix,像控点精度平面中误差0.033m,高程中误差0.063m;检查点精度,具体精度见精度分析小结。
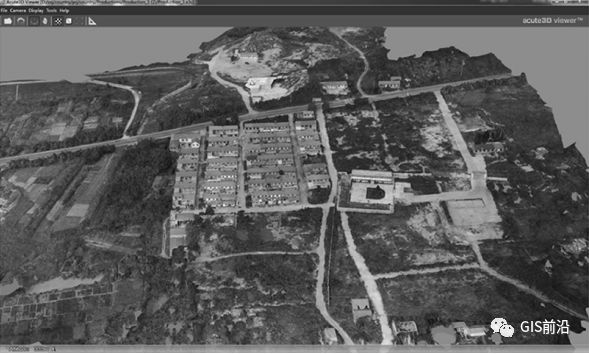
图4 倾斜摄影空中三角测量 (3)三维实景模型生成基于空中三角测量成果,进行模型分块,在分块模型的基础上,提取测区密集点云,构建不规则三角网,建立三维模型;同时利用5镜头获取的多角度纹理信息,自动拼贴,得到测区实景三维模型,如图5所示。
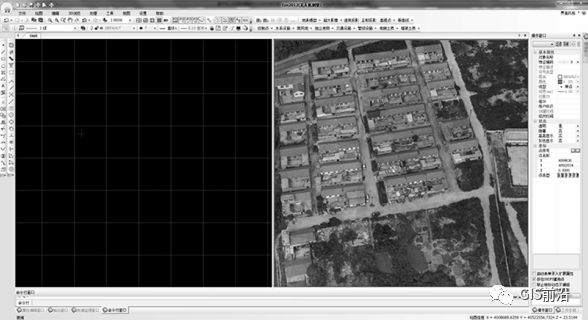
图5 实景三维模型 3.2大比例尺地形图测绘 大比例地形图测绘主要基于EPS无人机三维模块,利用三维实景模型的空间量测功能,直接进行地形、地物的采集工作。具体步骤如下所示。 (1)EPS软件加载三维实景模型在EPS无人机测量模块中利用模型转换功能将Smart3D生成的OSGB格式的模型转换成DSM高程模型,然后加载DSM模型从而实现实景三维模型的加载,如图6所示
图6 EPS 加载三维模型 2)地形图绘制如图7所示,基于三维实景模型的地形图制作,借助模型的空间尺寸信息,直接进行空间量算及采集,同时通过模型旋转及多角度观察等功能实现自动房檐改正,免去大量的外业实测及调绘工作,大大提高地形图测绘的工作效率。图7基于EPS绘制地形图。
图7 基于 EPS 绘制地形图 04 精度分析 4.1空中三角测量精度 由表1控制点和检查点的精度表可知,控制点水平中误差为0.007m,高程中误差为0m,点位中误差0.007m,检查点水平中误差0.038m,高程中误差0.079m,点位中误差0.088m,空中三角测量精度较高,满足大比例尺地形图测绘需求。像控点及检查点中误差表1检查项点号。
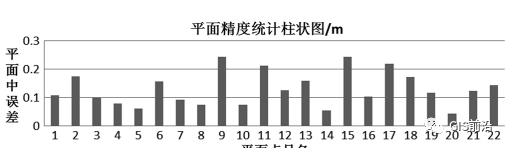
4.2平面及高程精度 (1)平面精度平面精度检查采用RTK外业实测特征点和地形图上的同名点进行统计分析,具体精度统计表如表2所示。如图8所示,总共22个平面精度统计的点,平面位置精度均小于0.25m,中误差0.144m,满足1∶500大比例尺地形图平面精度要求。
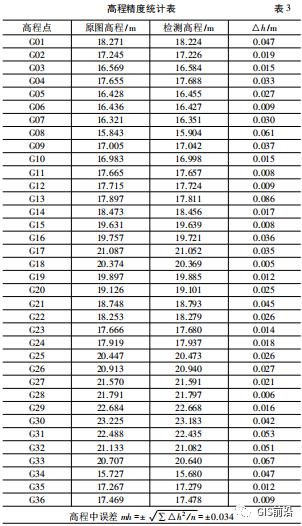
图8 平面精度统计折线图 2)高程精度高程精度检查采用RTK外业实测特征点和地形图上的同名点(可通过实景三维模型直接获取)进行统计分析,具体精度统计如表3所示。
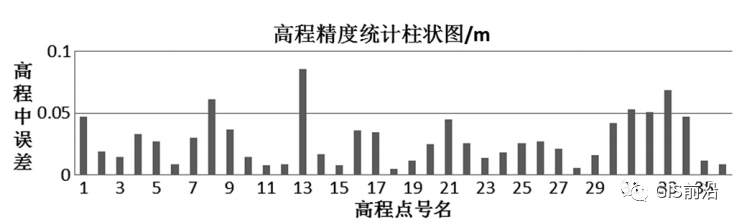
如图9所示,总共35个平面精度统计的点,高程误差均小于0.1m,最大高程误差为0.086m,高程中误差0.034m,满足1∶500地形图高程精度要求。
图9 高程精度统计折线图 05 结论 本文给出了基于倾斜摄影技术测绘大比例尺地形图的技术路线,并通过具体实验精度分析,验证了此技术路线的可行性。同时借助实景三维的立体量测、任意视角等优点,实现房檐改正、地形、地物全内业绘制,避免了传统地形图外业调绘、补测等工作,为大比例地形图测绘提供了一个新的解决方案 来源:《城市勘测》2019年2月第2期 作者:周小杰,胡振彪,乔新 原标题:无人机倾斜摄影技术在大比例尺地形图测绘中的应用 本文仅限行业学习交流之用,版权、著作权归原载平台及作者所有,如有侵权,请联系删除。 - END -返回搜狐,查看更多 |



【本文地址】
今日新闻 |
推荐新闻 |