STM32驱动步进电机(原理、程序、解决电机只震动不转动问题) |
您所在的位置:网站首页 › 高速步进电机20000转 › STM32驱动步进电机(原理、程序、解决电机只震动不转动问题) |
STM32驱动步进电机(原理、程序、解决电机只震动不转动问题)
|
一、步进电机的介绍
首先来看一下步进电机的样子,本介绍采用平时最常见也是最简单的28BYJ-48,这是一个五线四项电机。 五线:顾名思义 外部五条线 四项:电机内部的定子上有8个齿,正对着的2个齿上的绕组又是串联在一起的,也就是说正对着的2个绕组总是会同时导通或关断的,如此就形成了4相  二、步进电机的原理及工作方式
原理:
二、步进电机的原理及工作方式
原理:
步进电机是一种将电脉冲信号转换成相应角位移或线位移的电动机。每输入一个脉冲信号,转子就转动一个角度或前进一步,其输出的角位移或线位移与输入的脉冲数成正比,转速与脉冲频率成正比。 通俗易懂的说:就是给不同的项轮流通电,在电磁感应的作用下,每次产生一个很小的角位移,连贯起来就带动了电机的转动,从而驱动负载。 工作方式:四拍驱动、八拍驱动。 四拍驱动:这是最简单的步进电机驱动方式。这种方式,电机在每个瞬间只有一个线圈导通。 A→B→C→D
第一个图更方便大家理解,第二个图就是相应拉高拉低。 大白话就是:按顺序给相应引脚拉高(1)拉低(0)。 一个拉高,其他三个拉低。 八拍驱动:就是在上述四拍切换过程中穿插两个线圈同时拉高的情况。 A→AB→B→BC→C→CD→D→DA
由于单片机IO口输出电流过小,无法带动电机运行,因此我们需要另外加一个驱动板,用ULN2003就行,简单便宜。
话不多说直接上代码。 step_motor.h #ifndef __STEP_MOTOR_H #define __STEP_MOTOR_H #include "sys.h" #include "delay.h" extern u8 STEP; //定义单步计数 全局变量 #define STEP_MOTOR_PORT GPIOG //定义IO接口所在组 #define STEP_MOTOR_A GPIO_Pin_2 //定义IO接口 #define STEP_MOTOR_B GPIO_Pin_3 //定义IO接口 #define STEP_MOTOR_C GPIO_Pin_4 //定义IO接口 #define STEP_MOTOR_D GPIO_Pin_5 //定义IO接口 #define STEP_MOTOR_CLK RCC_APB2Periph_GPIOG void STEP_MOTOR_Init(void);//初始化 void STEP_MOTOR_OFF (void);//断电状态 void STEP_MOTOR_8A (u8 a,u16 speed); void STEP_MOTOR_NUM (u8 RL,u16 num,u8 speed);//电机按步数运行 void STEP_MOTOR_LOOP (u8 RL,u8 LOOP,u8 speed);//电机按圈数运行 #endif step_motor.c #include "step_motor.h" u8 STEP; void STEP_MOTOR_Init(void){ //接口初始化 GPIO_InitTypeDef GPIO_InitStruct; RCC_APB2PeriphClockCmd(STEP_MOTOR_CLK, ENABLE); GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP; GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStruct.GPIO_Pin = STEP_MOTOR_A; GPIO_Init(STEP_MOTOR_PORT, &GPIO_InitStruct); GPIO_InitStruct.GPIO_Pin = STEP_MOTOR_B; GPIO_Init(STEP_MOTOR_PORT, &GPIO_InitStruct); GPIO_InitStruct.GPIO_Pin = STEP_MOTOR_C; GPIO_Init(STEP_MOTOR_PORT, &GPIO_InitStruct); GPIO_InitStruct.GPIO_Pin = STEP_MOTOR_D; GPIO_Init(STEP_MOTOR_PORT, &GPIO_InitStruct); GPIO_ResetBits(STEP_MOTOR_PORT, STEP_MOTOR_A); GPIO_ResetBits(STEP_MOTOR_PORT, STEP_MOTOR_B); GPIO_ResetBits(STEP_MOTOR_PORT, STEP_MOTOR_C); GPIO_ResetBits(STEP_MOTOR_PORT, STEP_MOTOR_D); } void STEP_MOTOR_OFF (void) //电机断电 全拉低 { GPIO_ResetBits(STEP_MOTOR_PORT,STEP_MOTOR_A | STEP_MOTOR_B | STEP_MOTOR_C | STEP_MOTOR_D);//各接口置0 } void STEP_MOTOR_8A (u8 a,u16 speed) //电机单步8拍 { switch (a){ case 0: GPIO_ResetBits(STEP_MOTOR_PORT,STEP_MOTOR_B | STEP_MOTOR_C | STEP_MOTOR_D);//0 GPIO_SetBits(STEP_MOTOR_PORT,STEP_MOTOR_A);//1 break; case 1: GPIO_ResetBits(STEP_MOTOR_PORT,STEP_MOTOR_C | STEP_MOTOR_D);//0 GPIO_SetBits(STEP_MOTOR_PORT,STEP_MOTOR_A | STEP_MOTOR_B);//1 break; case 2: GPIO_ResetBits(STEP_MOTOR_PORT,STEP_MOTOR_A | STEP_MOTOR_C | STEP_MOTOR_D);//0 GPIO_SetBits(STEP_MOTOR_PORT,STEP_MOTOR_B);//1 break; case 3: GPIO_ResetBits(STEP_MOTOR_PORT,STEP_MOTOR_A | STEP_MOTOR_D);//0 GPIO_SetBits(STEP_MOTOR_PORT,STEP_MOTOR_B | STEP_MOTOR_C);//1 break; case 4: GPIO_ResetBits(STEP_MOTOR_PORT,STEP_MOTOR_A | STEP_MOTOR_B | STEP_MOTOR_D);//0 GPIO_SetBits(STEP_MOTOR_PORT,STEP_MOTOR_C);//1 break; case 5: GPIO_ResetBits(STEP_MOTOR_PORT,STEP_MOTOR_A | STEP_MOTOR_B);//0 GPIO_SetBits(STEP_MOTOR_PORT,STEP_MOTOR_C | STEP_MOTOR_D);//1 break; case 6: GPIO_ResetBits(STEP_MOTOR_PORT,STEP_MOTOR_A | STEP_MOTOR_B | STEP_MOTOR_C);//0 GPIO_SetBits(STEP_MOTOR_PORT,STEP_MOTOR_D);//1 break; case 7: GPIO_ResetBits(STEP_MOTOR_PORT,STEP_MOTOR_B | STEP_MOTOR_C);//0 GPIO_SetBits(STEP_MOTOR_PORT,STEP_MOTOR_A | STEP_MOTOR_D);//1 break; default: break; } delay_ms(speed); //延时 STEP_MOTOR_OFF();//进入断电状态,防电机过热 } void STEP_MOTOR_NUM (u8 RL,u16 num,u8 speed) //电机按步数运行 { u16 i; for(i=0;i7)STEP=0; }else{ if(STEP==0)STEP=8; STEP--; } STEP_MOTOR_8A(STEP,speed); } } void STEP_MOTOR_LOOP (u8 RL,u8 LOOP,u8 speed) //电机按圈数运行 { STEP_MOTOR_NUM(RL,LOOP*4076,speed); } 主函数 main.c在主函数中调用这个函数来驱动电机。 函数第一个参数:控制正反转 1→正转 0→反转 第二个参数:控制电机转的圈数 第三个参数:延时 STEP_MOTOR_LOOP(1,1,1); //步进电机正传 STEP_MOTOR_LOOP(0,1,1); //步进电机反传 五、电机只振东不转动问题 ①电机只震动,却不转动(正反都不转动)可以适当调节电机驱动函数的延时时间,就是调节8拍切换的延时,调大(2s)、调小(1s)都试一下,如果不是电机损坏的话 这种方法都可以解决问题。
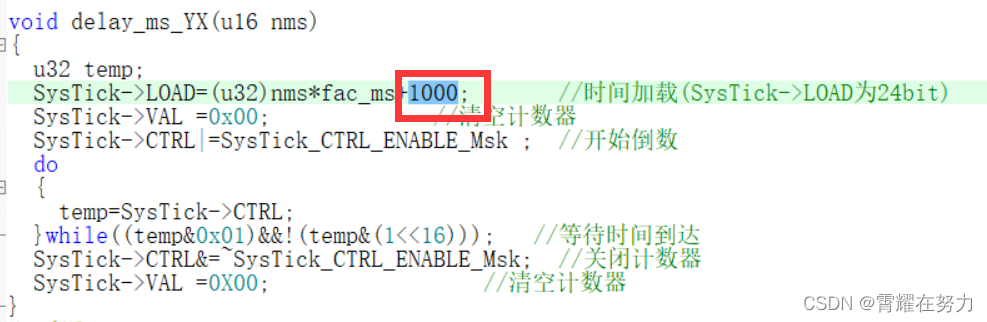
这种情况会发现演示调为1s、2s都不好使,总是有一个正常、一个不正常,,,这时候需要将延时取中间大小,比如说1.5s,,,但是呢,你会发现程序中的 delay_ms() 函数只能设置整数,要么1 要么2,不能设置1.5,,这就需要我们更改一下 delay_ms() 函数了。改成这样即可:
全部工程链接:https://item.taobao.com/item.htm?spm=a1z10.1-c.w4004-24450682672.26.7aa61b42erNczw&id=693670548640 欢迎大家指正交流,有空可以一起讨论代码啊。 --------------一个正在努力的人 |






【本文地址】