测量学5 |
您所在的位置:网站首页 › 高程最或然值的中误差 › 测量学5 |
测量学5
|
测量学
lesson 5:
测量误差理论的基本知识
要确定一个三角形的形状,测量其两个内角 ∠A$ 和 $∠B 即可,∠C = 180° - ∠A - ∠B。 
但是我现在测量了 ∠A 和 ∠B ,同时又测量了 ∠C。 理论上∠A + ∠B + ∠C = 180°,可是实际上∠A + ∠B + ∠C ≠ 180°。 说明测量存在误差,而且是无法避免的。 通过多余观测我们可以发现误差,进而对其进行平差。 误差的概念观测条件:测量时的环境条件,仪器条件和人员条件统称为观测条件。 误差:在测量中,由于仪器本身不尽完善、观测者的局限性以及外界条件的影响,使得观测值不可避免地与其理论值不符,这种不符值称为误差。 等精度观测:在相同观测条件下进行的观测。 误差的来源: 仪器误差(如水准测量的 i i i角误差,经纬仪的度盘分划误差、视准轴误差,距离测量的尺长误差)观测者误差(如测角时的照准误差,读数误差)外界条件引起误差(如地球曲率、大气折光)误差的分类: **系统误差:**在相同的观测条件下,对某个固定量进行多次观测,如果观测误差在符号及大小上有一定的规律性,这种误差称为系统误差。 距离测量的尺长误差:拿名义长度50米,实际长度50.5米的尺量取距离,量取一尺段50米,实际上距离是50.5米,导致每尺段都会量短0.5米。如果量 n n n个尺段,就会引起 n × 0.5 n \times 0.5 n×0.5m的误差。但是如果在测量结果中加上 n × 0.5 n \times 0.5 n×0.5m,就可以把这项误差消除。水准测量的 i i i角误差,地球曲率、大气折光引起的误差经纬仪测量水平角的视准轴误差、横轴误差、度盘偏心差经纬仪测量竖直角的竖盘指标差三角高程测量中地球曲率、大气折光引起的误差系统误差有规律,而且具有累积性,对测量成果的影响较大。但是可以通过校正仪器,加改正数,采用一定的观测方法加以减弱和消除。 偶然误差:在相同的观测条件下,对某个固定量进行多次观测,如果观测误差在符号及大小上没有一定的规律性,这种误差称为偶然误差。 水准测量时的估读误差测量水平角时的仪器对中误差、目标偏心差粗差:因读错、记错、测错造成的错误 系统误差可以减弱和消除,粗差能够及时发现并排除。只有偶然误差没有办法彻底消除,所以偶然误差对测量结果的影响就起到了主导作用。 因此测量误差理论主要研究:在具有偶然误差的一系列观测值中,如何求得最可靠的结果(最或然值)和评定观测结果的精度(中误差)。 偶然误差的特性假定观测时仪器均已校正,之后对一三角形的内角在相同观测条件下进行 n 次观测,计算内角和。得到一组观测结果。 真误差:观测值与其真值之差,称为真误差。 Δ = X − l (真值 − 观测值) \Delta = X - l(真值-观测值) Δ=X−l(真值−观测值) 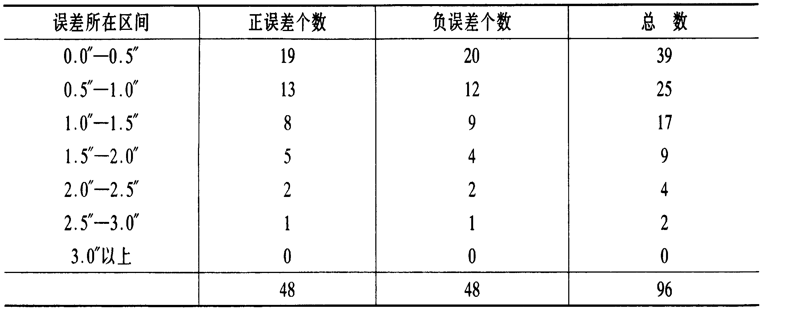
虽然从单个误差来看,偶然误差的正负和大小没有规律。但是从大量同精度观测值的偶然误差进行统计分析可以看出,偶然误差具有以下四个特性: 在一定的条件下,偶然误差的绝对值不会超过一定的界限;(有界性)绝对值小的误差比绝对值大的误差出现的概率大;(密集性)绝对值相等的正、负误差出现的概率相等;(对称性)当观测值无线增大时,偶然误差的算术平均值趋近于零。(抵偿性)偶然误差的特性也可以用直方图表示: 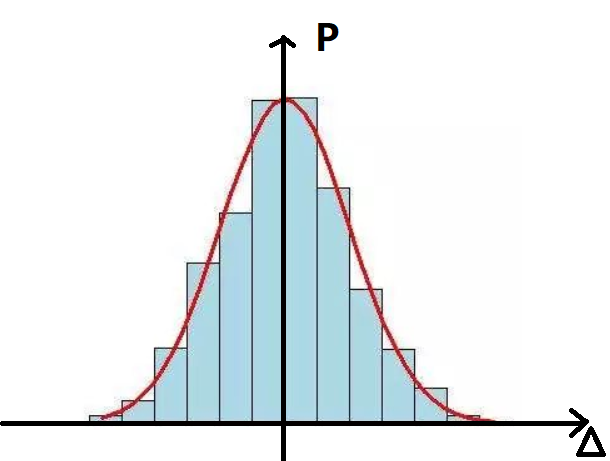
可以看出,偶然误差服从正态分布。 正态分布曲线的形状由 μ \mu μ和 σ \sigma σ 有关, μ = E ( x ) = 0 \mu = E(x) = 0 μ=E(x)=0,因此曲线以纵轴对称。 σ 2 = D ( x ) \sigma^2 = D(x) σ2=D(x), σ = D ( x ) \sigma = \sqrt {D(x)} σ=D(x) ,当 σ \sigma σ越小时,曲线的峰值越大,表明小误差出现的概率大,说明误差分布较为紧密(离散度小),该组观测值的精度高。反之 σ \sigma σ 越大,精度越低。所以测量中常用标准差 σ \sigma σ 来作为评定精度的指标。 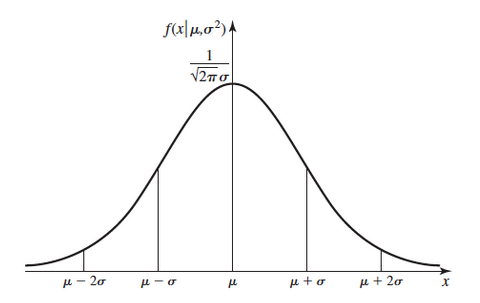 衡量精度的指标
衡量精度的指标
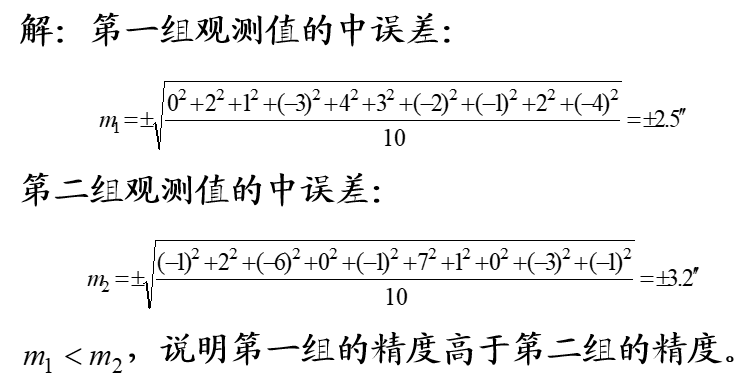
中误差:按有限次观测的偶然误差求得的标准差为“中误差”,用来表示偶然误差或者观测值的离散程度。 m = ± Δ 1 2 + Δ 2 2 + ⋯ + Δ n 2 n = ± [ Δ Δ ] n m = \pm \sqrt {\frac{\Delta_1^2 + \Delta_2^2 + \dots + \Delta_n^2}{n}} = \pm \sqrt {\frac{[\Delta \Delta]}{n}} m=±nΔ12+Δ22+⋯+Δn2 =±n[ΔΔ] m 是由一组同精度观测值的真误差求出的。 例题: 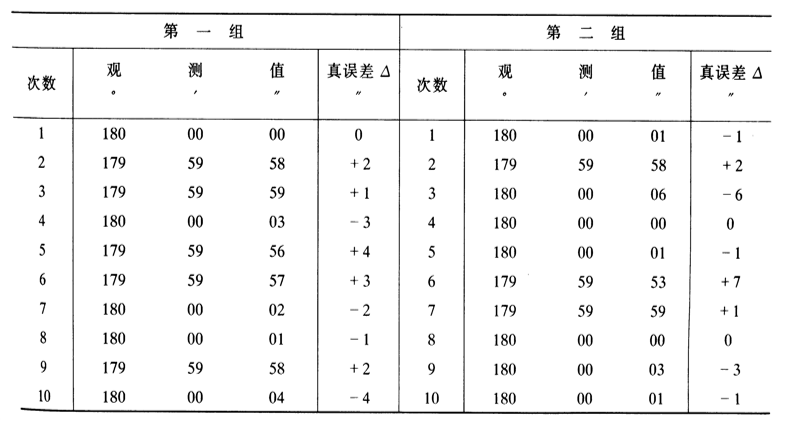
**相对误差:**在测量工作中常以相对误差,即m/D,作为衡量距离测量的精度标准,并把m/D化为1/K的形式。 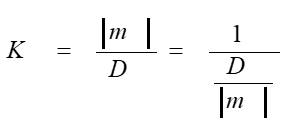
容许误差:(用于区分误差和错误的界限) 偶然误差超过两倍中误差的概率为4.6%,超过三倍中误差的概率为0.3%。 所以工程中常取两倍或者三倍中误差为容许误差。Δ容=2m 或Δ容=3m(现行规范常去两倍中误差) 同精度观测值的算术平均值在相同的观测条件下对未知量观测了n次,观测值为 l 1 、 l 2 … … l n l_1、l_2……l_n l1、l2……ln,则其算术平均值(最或然值、最或是值) x x x 为: 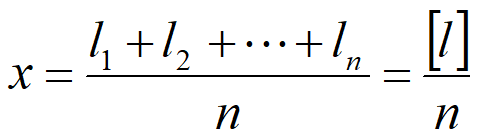
推导:假设未知量的真值为 X X X, 
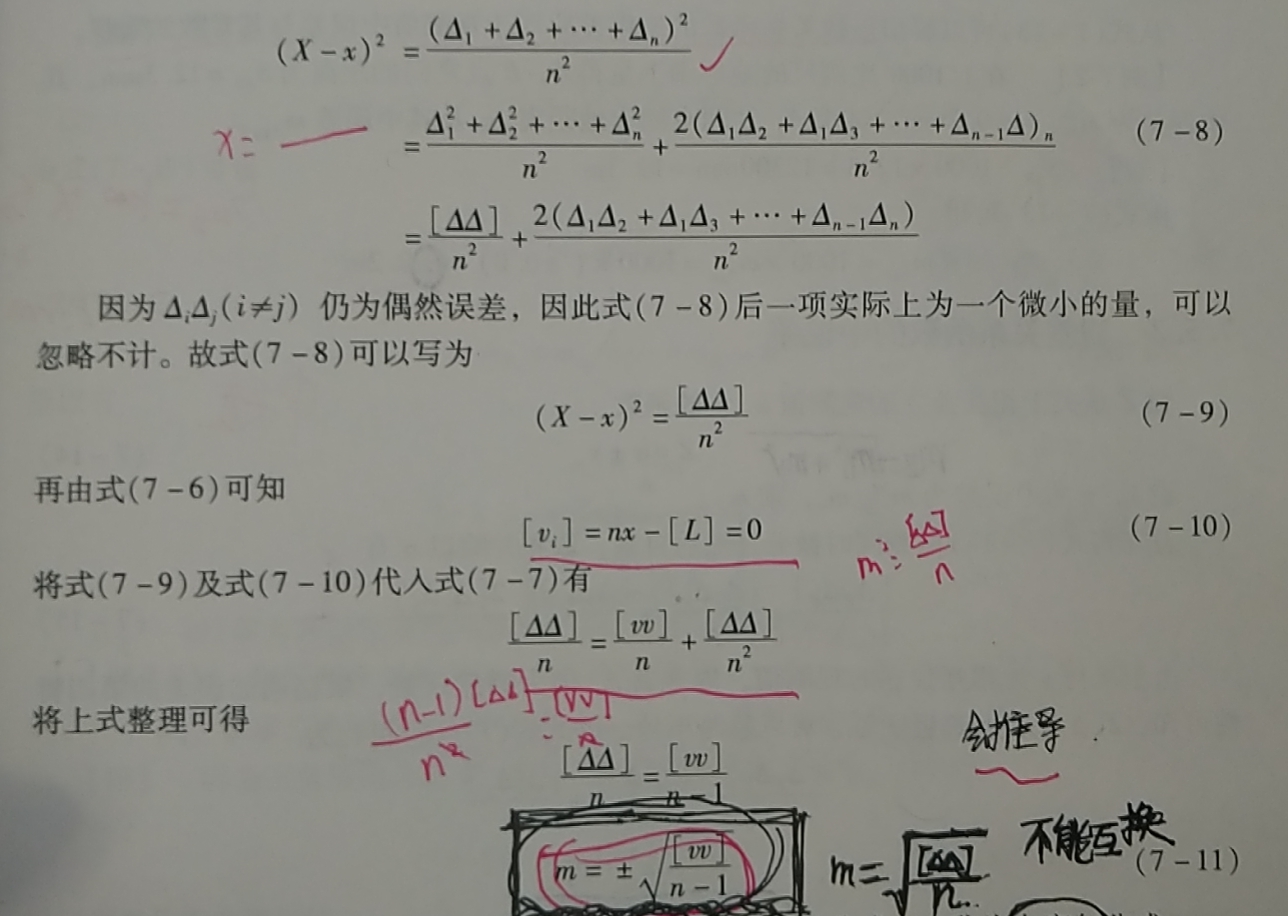
==由于很多被观测量的真值并不知道(比如测量一个角或者测量一条边),所以就不能用真误差来求观测值的中误差。==但是观测值的算术平均值是可以计算得到的,所以常用算数平均值代替真值参与计算。 算术平均值与观测值之差称为改正数,并以 v v v表示: v = x − l ( 算术平均值 − 观测值 ) v = x - l(算术平均值 - 观测值) v=x−l(算术平均值−观测值) 利用改正数求同精度观测值中误差的公式称为白塞尔公式: m = ± v 1 2 + v 2 2 + ⋯ + v n 2 n − 1 = ± [ v v ] n − 1 m = \pm \sqrt {\frac{v_1^2 + v_2^2 + \dots + v_n^2}{n - 1}} = \pm \sqrt {\frac{[v v]}{n - 1}} m=±n−1v12+v22+⋯+vn2 =±n−1[vv] 推导: 
 误差传播定律
误差传播定律
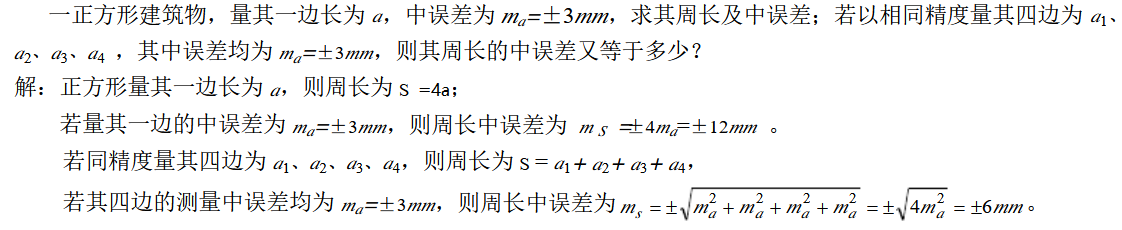
误差传播定律:阐述观测值中误差与其函数中误差之间关系的定律,称为误差传播定律。 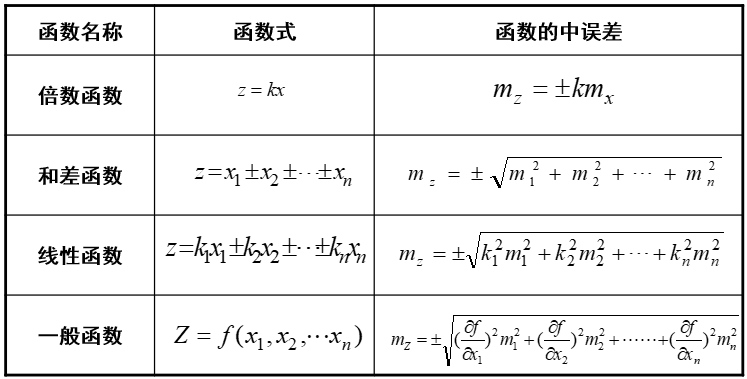
同精度观测值算术平均值的中误差: m x = m 1 n m_x = m \sqrt \frac{1}{n} mx=mn1 设观测值的中误差为m,求同精度观测值 L 1 , L 2 , . . . L n L_1,L_2,...L_n L1,L2,...Ln算术平均值的中误差。 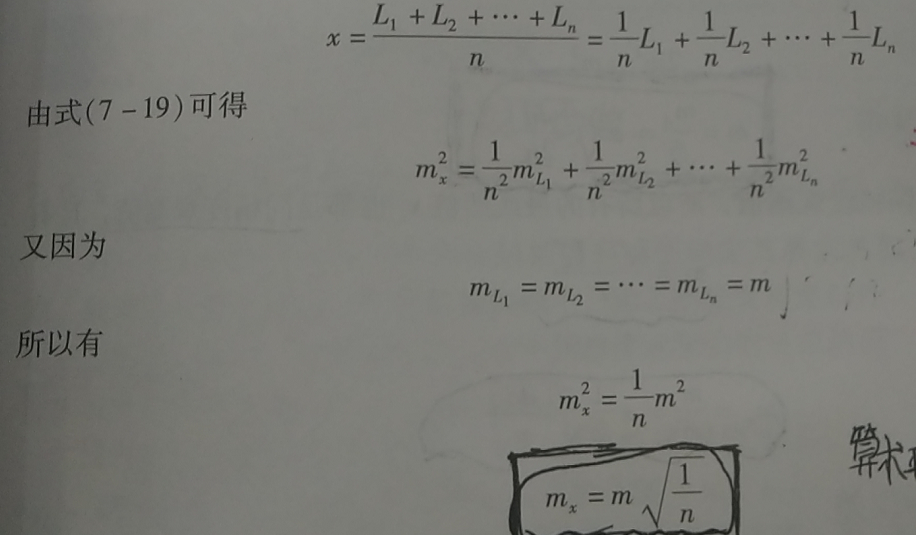
例题1:
例题2: 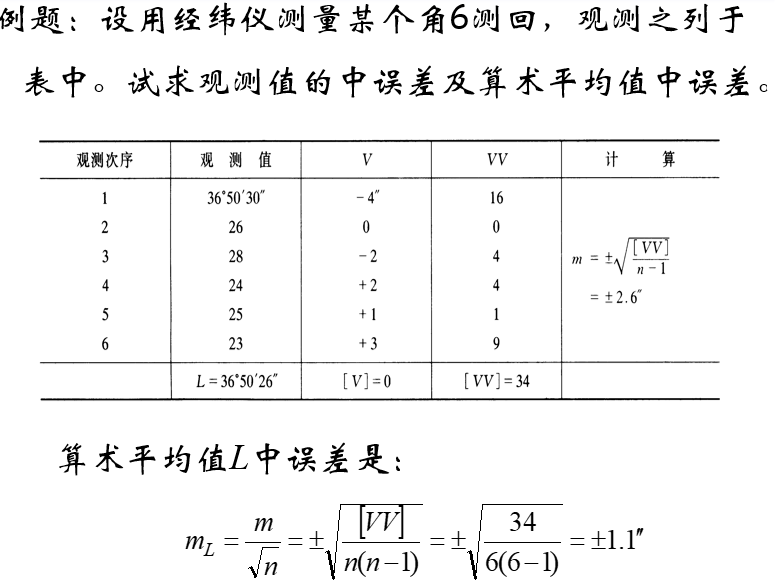
例题3: 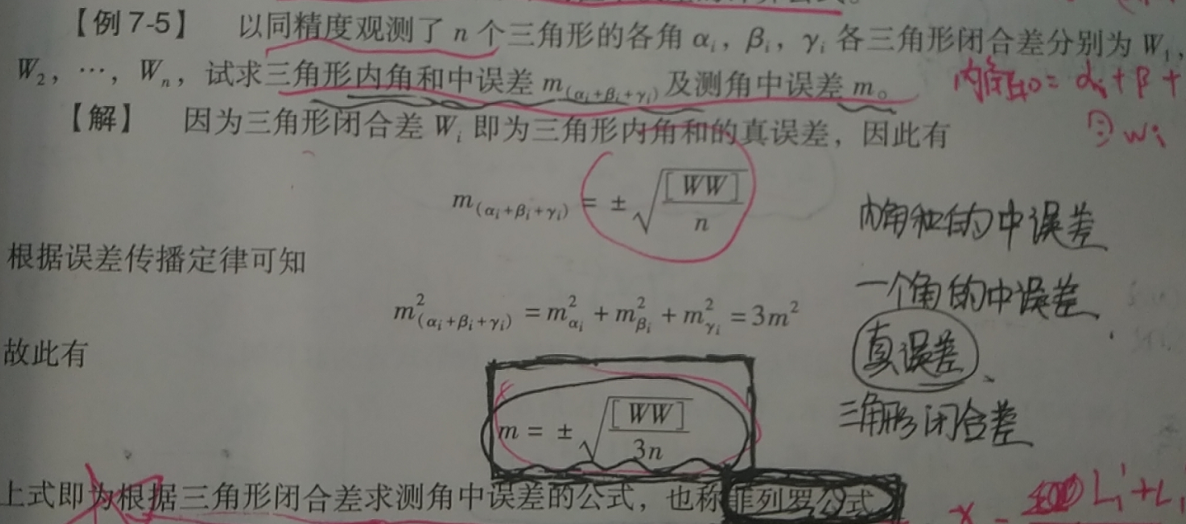
例题4: 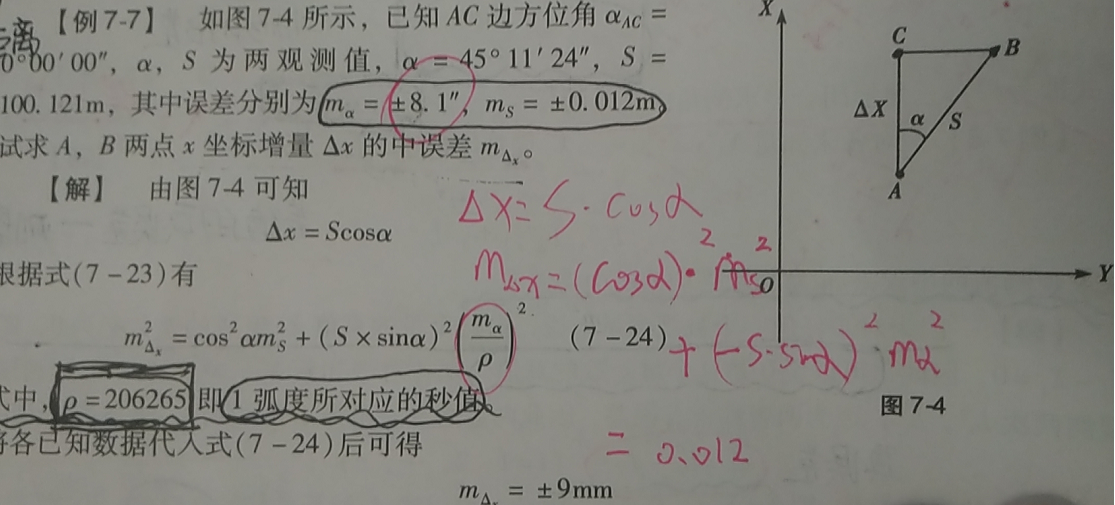
例题5:  广义算术平均值
广义算术平均值
多次测量一个未知量,除了等精度观测值外,还会遇到非等精度观测的问题。 比如水准测量,同样是测量E点的高程,不同路线测量的精度不一样(观测条件不同,所以是不等精度观测)。 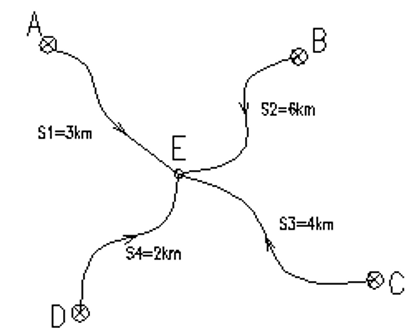
**权:**就是衡量不等精度观测值在计算中应占的比例数。 权是一组与观测值中误差的平方成反比的数值,公式表示为: P = C m 2 P = \frac{C}{m^2} P=m2C 式中,C为任意常数。 权也可以衡量观测值之间的精度高低(相对),权越大,中误差越小,精度越高;反之权越小,精度越低。 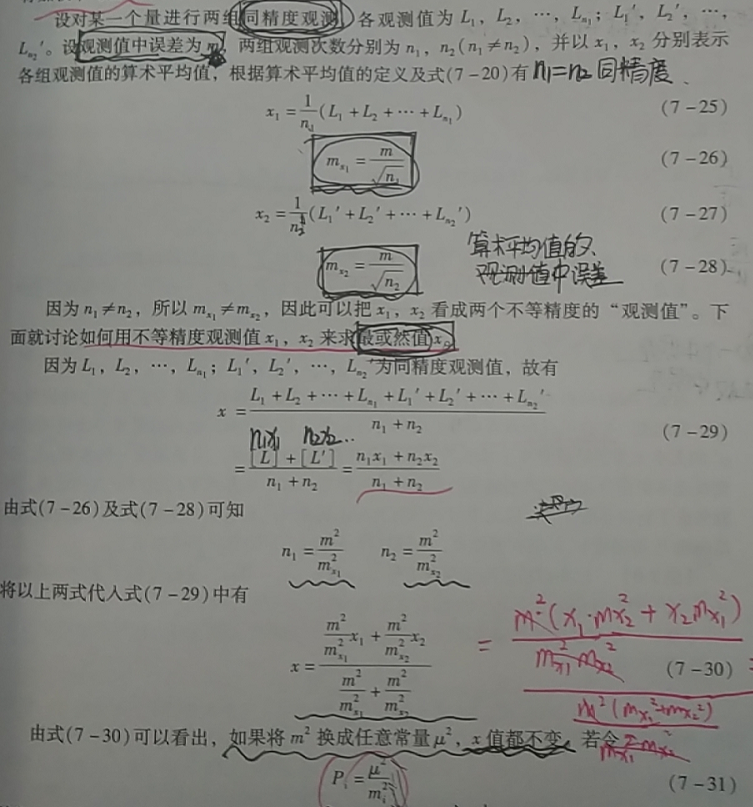
等于1的权叫单位权,权等于1的中误差为单位权中误差,一般用 μ \mu μ表示。 所以权又可以表示为: P i = μ 2 m i 2 P_i = \frac{\mu^2}{m_i^2} Pi=mi2μ2 这时候中误差可以表示为: m i = μ 1 P i m_i = \mu \sqrt {\frac{1}{P_i}} mi=μPi1 加权平均值:设不等精度观测值 L 1 、 L 2 , . . . L n L_1、L_2,...L_n L1、L2,...Ln,其权为 P 1 、 P 2 , . . . P n P_1、P_2,...P_n P1、P2,...Pn,则其广义算数平均值 x x x为: x = P 1 L 1 + P 2 L 2 + . . . + P n L n P 1 + P 2 + . . . + P n = [ P L ] [ P ] x = \frac{P_1L_1+P_2L_2+...+P_nL_n}{P_1+P_2+...+P_n} = \frac{[PL]}{[P]} x=P1+P2+...+PnP1L1+P2L2+...+PnLn=[P][PL] 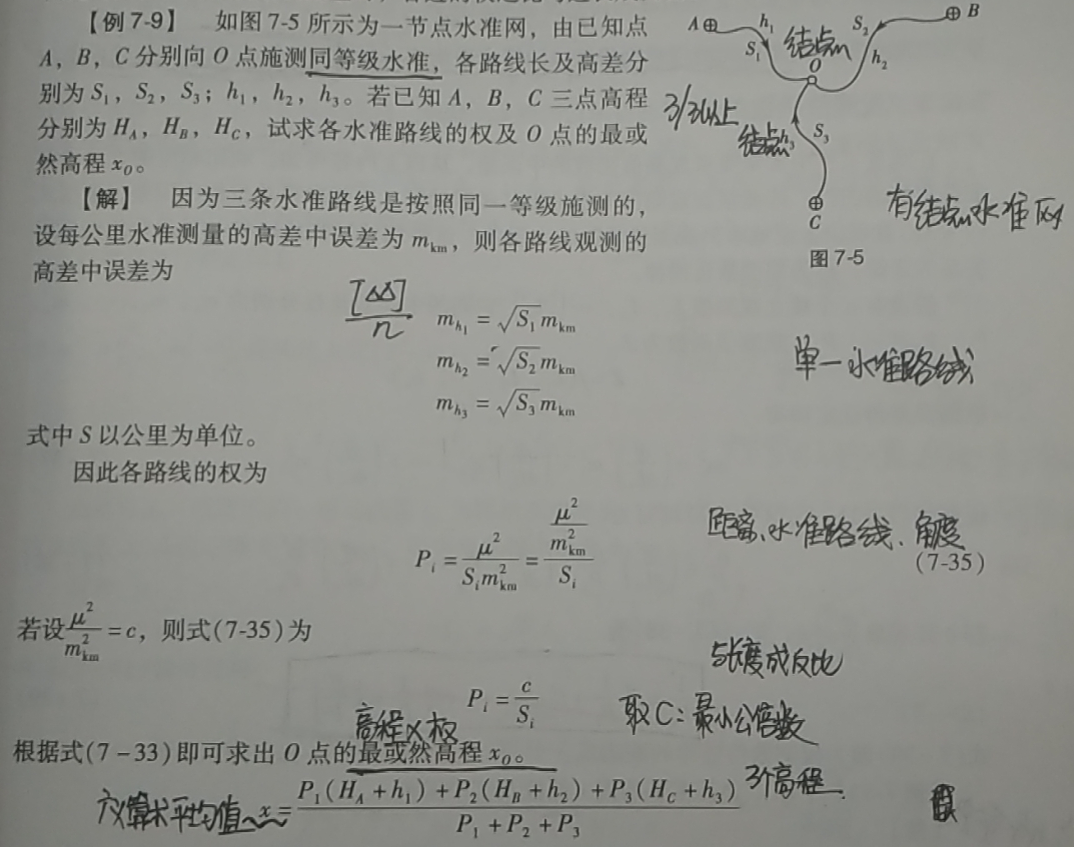
同精度观测的各水准路线的权与水准路线长度 S S S成反比。 P = C S P = \frac{C}{S} P=SC(C一般取最大公倍数) 同精度观测的个水准路线的权与其测站数 n n n成反比。 P = C n P = \frac{C}{n} P=nC 以一测回的水平角观测中误差 β \beta β为单位权中误差,根据误差传播定律有: n测回算术平均值的角度中误差为: m β ( n ) = m β n m_{\beta(n)} = \frac{m_\beta} {\sqrt n} mβ(n)=n mβ 则取n测回算数平均值的权 P β ( n ) = n P_{\beta(n)} = n Pβ(n)=n 权倒数传播律阐述观测值的权与其函数的权之间关系的定律,叫做权倒数传播律。 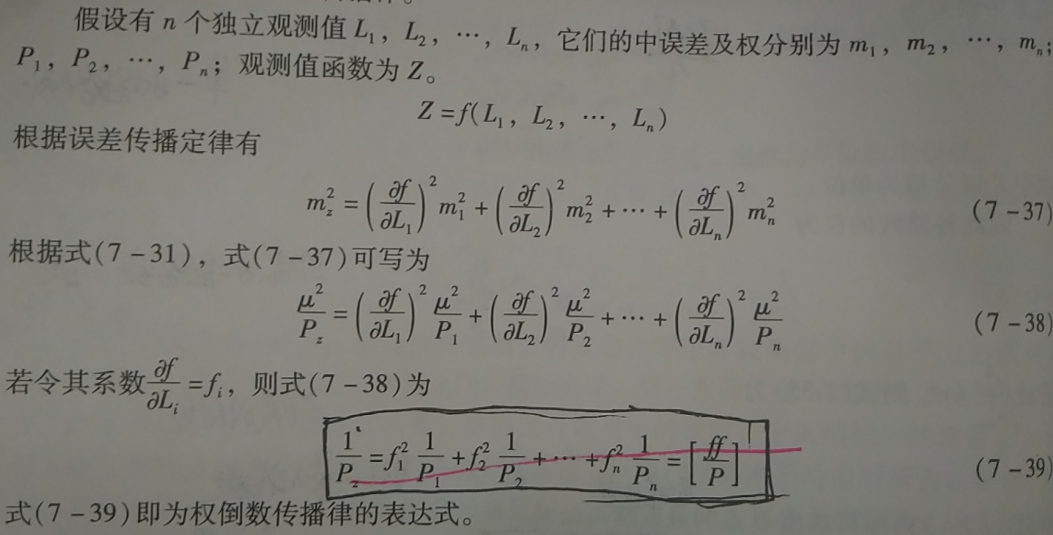
例题: 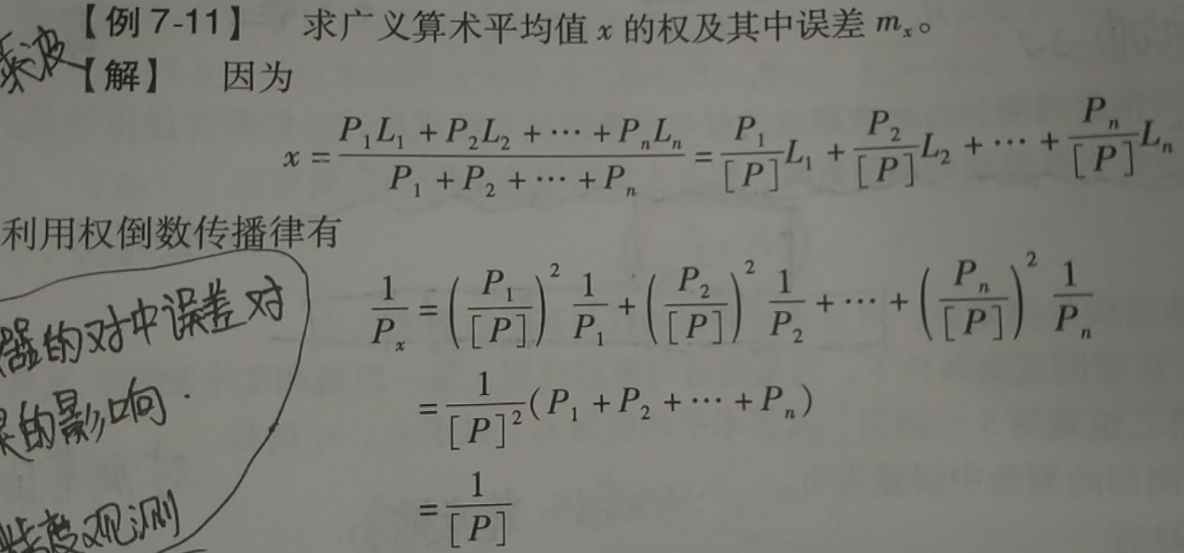
可以看出,广义算术平均值的权等于各观测值权的和: P x = [ P ] P_x = [P] Px=[P] 这时广义算数平均值的中误差为: m i = μ 1 [ P ] m_i = \mu \sqrt {\frac{1}{[P]}} mi=μ[P]1 单位权中误差的计算前面利用观测值的真误差和改正数可以求同精度观测值的中误差。 但是这两个公式不能对不等精度观测值进行精度评定。 求单位权中误差、观测值和观测值函数的权是平定不等精度观测值及其函数精度的基础。 在测量工作中,一般取一次观测、一个测回或单位长度等的测量误差作为单位权中误差。 但是这种情况下可能不知道单位权中误差是多少: 用不等精度观测值的真误差来估算单位权中误差的计算公式: μ = ± [ P Δ Δ ] n \mu = \pm \sqrt {\frac{[P \Delta \Delta]}{n}} μ=±n[PΔΔ] 由不同精度观测值的改正数来估算单位权中误差的计算公式: μ = ± [ P V V ] n − 1 \mu = \pm \sqrt {\frac{[P V V]}{n -1}} μ=±n−1[PVV] 例题1: 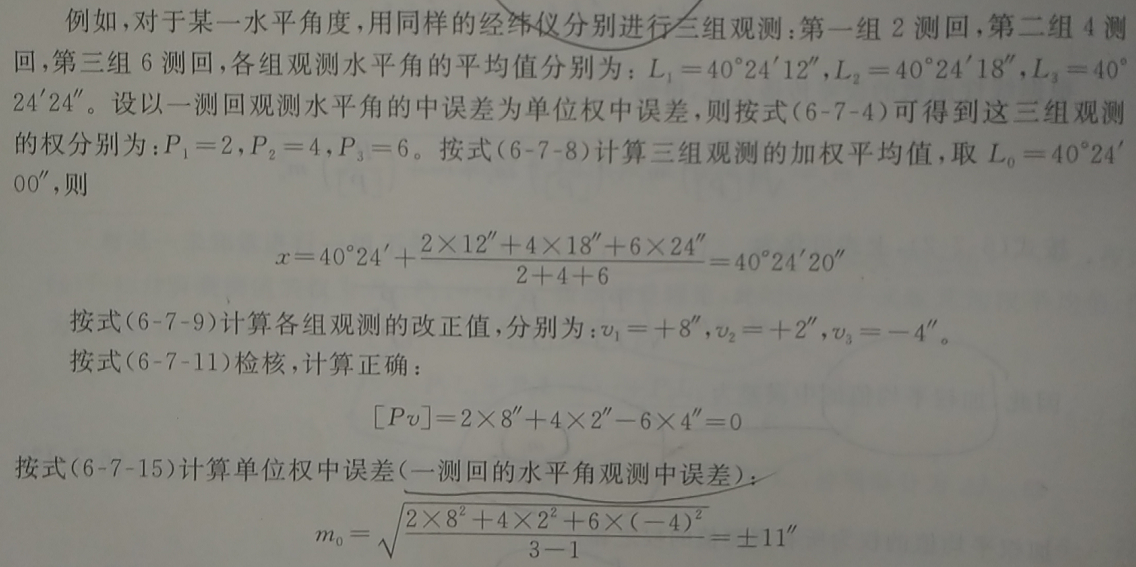
例题2: 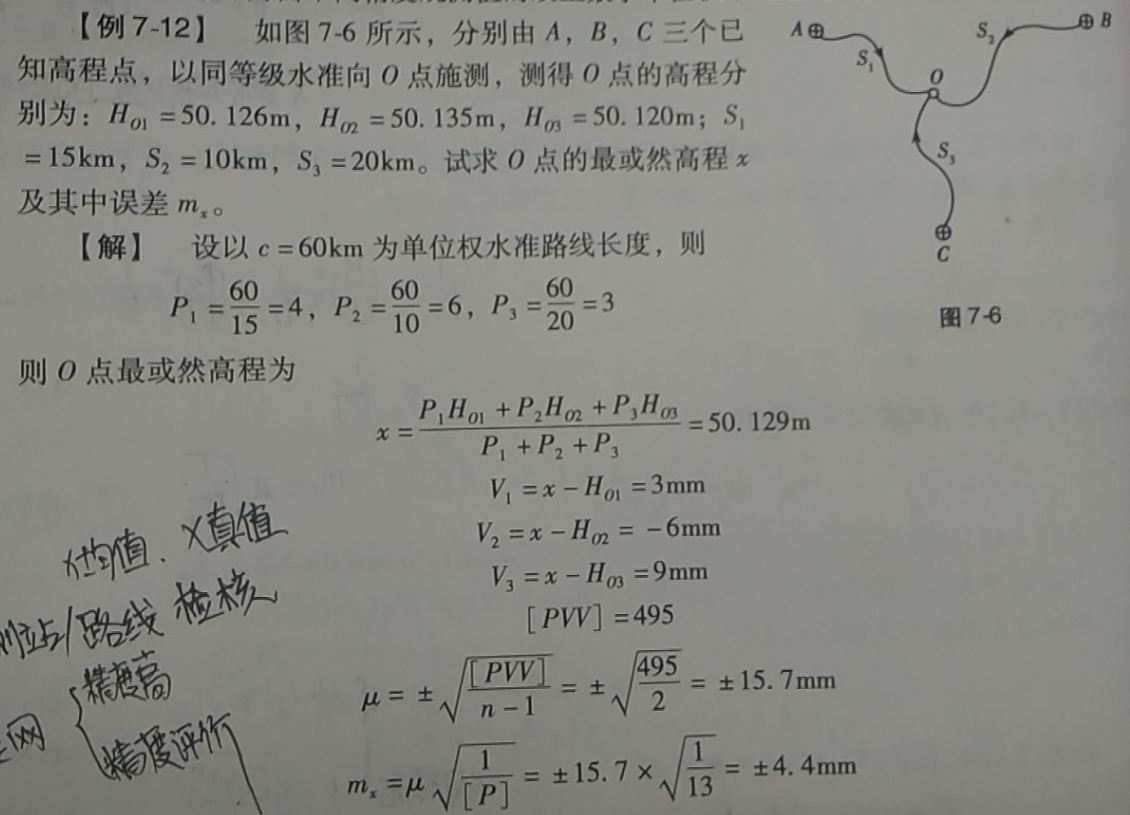
|
【本文地址】
今日新闻 |
推荐新闻 |