基于气浮轴承支撑的俯仰滚转双自由度风洞动态试验装置的制作方法 |
您所在的位置:网站首页 › 风洞实验技术电子版 › 基于气浮轴承支撑的俯仰滚转双自由度风洞动态试验装置的制作方法 |
基于气浮轴承支撑的俯仰滚转双自由度风洞动态试验装置的制作方法
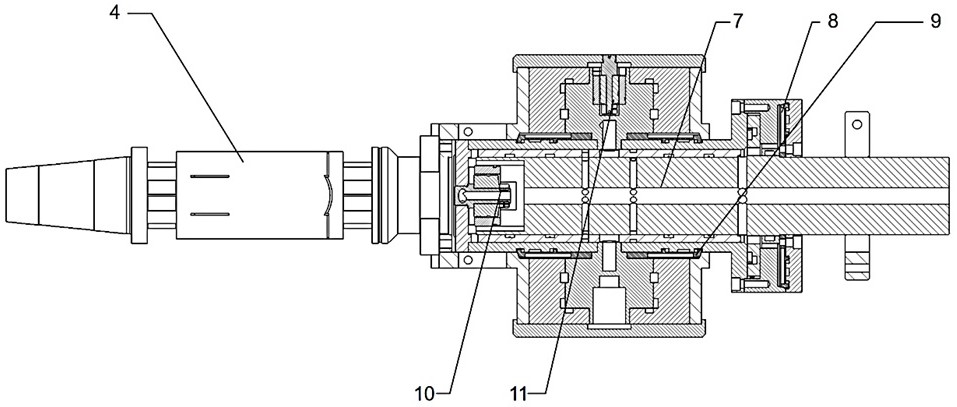 本发明属于高超声速飞行器动态风洞试验,具体一种涉及基于气浮轴承支撑的俯仰滚转双自由度风洞动态试验装置。 背景技术: 1、高超声速飞行器具有三维空间机动能力强、再入后续航能力强等显著优势,能适应各种复杂多变的飞行弹道,执行各种快速打击任务,具有较高的突防成功率,能够有效制约反导系统功能的发挥。高超声速飞行器的飞行性能卓越,但其气动布局设计却面临着极大的挑战:高超声速飞行器飞行耦合现象严重,特别是纵向-俯仰方向的气动耦合、运动耦合和惯性耦合等耦合效应比较显著,实际飞行中易出现耦合失稳甚至发散失控。开展高超声速飞行器飞行耦合动态风洞试验技术研究,对飞行器设计有着十分重大的实践意义。为了能够在地面精确地模拟高超声速飞行器纵向-俯仰方向的飞行耦合特性,动态试验模型的支撑方法问题是最主要的一个环节,必须设计满足动态风洞试验要求的动态支撑装置,解决动态试验模型俯仰和滚转两个自由度的动态支撑设计以及动态角速度、角加速度的精确测量问题。 2、目前,主要在低速风洞和跨超声速风洞开展动态风洞试验技术研究,采用张线式或条带式动态支撑方法。2002年,f. clark lawrence等人[status update of the aedcwind tunnel virtual flight testing development program, 40th aiaa aerospacesciences meeting and exhibit, 14-17, january,2002 [c].]设计了八根钢绳悬浮的支撑系统和环状套管结构组成的动态支撑装置,动态试验模型可以在俯仰和滚转方向自由地运动,在偏航方向受限地运动,并在加利福尼亚州中国湖海军空中作战中心(nawc)高速空气流系统(hivas)中对boa导弹模型进行了动态风洞试验。john c. magill等人在2003年[design of a wire suspension system for dynamic testing in aedc 16t, 41staerospace sciences meeting and exhibit, 6-9, january, 2003 [c].]设计了六根钢绳悬浮的支撑系统和卡环组件组成的动态支撑装置,模型可以在滚转、俯仰、偏航三个方向自由地运动。john c. magill等人分别在2005年[active yaw control with a wiresuspension system for dynamic wind tunnel testing, 43rd aiaa aerospacesciences meeting and exhibit, 10-13, january, 2005 [c].]和2009年[demonstration of a wire suspension for virtual flight testing in a windtunnel, aiaa journal of spacecraft and rockets, february, 2009 [j].]对该动态支撑装置进行改进并开展了验证性动态风洞试验。2010年,胡静等人[风洞虚拟飞行试验技术初步研究,实验流体力学,2010,02 [j].]设计了由八根张线和组合轴承系统组成的动态支撑装置,动态试验模型可以在滚转和俯仰方向自由运动,并在fd-10低速风洞中初步开展了动态试验技术研究。2013年,彭超等人[fl-26风洞条带悬挂支撑內式天平研制,实验流体力学,2013,10 [j].]开展了大飞机的条带式悬挂支撑试验技术研究,并在fl-26风洞进行大型飞机的精确测力试验及支撑干扰测力试验。但是,在高超声速风洞流场内,张线和条带前方容易产生激波,对风洞流场结构产生影响,对动态试验模型气动力产生较大的干扰影响。因此,张线式和条带式动态支撑方法不能满足高超声速飞行器动态风洞试验要求。 3、2016年,中国专利文献库公开了发明人团队的发明名称为机械轴承支撑的小不对称再入体气动力测量装置(zl201610307573.8)以及气浮轴承支撑的小不对称再入体气动力测量装置(zl201610308222.9)采用内、外天平嵌套组合的方法测量小不对称再入体的六分量气动力,在保证其他五分量测量精度的前提下,能大幅提高小滚转力矩分量测量的灵敏度和精准度,为在高超声速风洞开展动态风洞试验技术研究提供了技术支持。 4、当前,为了能够在地面精确地模拟高超声速飞行器纵向-俯仰方向的飞行耦合特性,亟需发展一种基于气浮轴承支撑的俯仰滚转双自由度风洞动态试验装置。 技术实现思路 1、本发明所要解决的技术问题是提供一种基于气浮轴承支撑的俯仰滚转双自由度风洞动态试验装置,保证动态试验模型能在滚转和俯仰两个自由度无摩擦或低摩擦地自由转动。采用这种动态支撑方法和装置,可以在高超声速风洞开展飞行器飞行耦合动态风洞试验技术研究。 2、本发明的基于气浮轴承支撑的俯仰滚转双自由度风洞动态试验装置,其特点是,动态试验模型包括从前至后顺序连接的模型前段和模型后段,在模型后段的中心轴线上,从前至后依次固定测力天平、动态支撑装置和尾支杆,尾支杆连接高超声速风洞试验段的模型支撑机构; 3、其中,尾支杆后端通过螺栓固定在模型支撑机构上,动态支撑装置的后端通过尾支杆连接法兰固定在尾支杆的前端;测力天平采用的六分量杆式应变天平,测力天平的后端通过天平连接法兰固定在动态支撑装置的前端;测力天平的前端与模型后段之间采用锥面连接,再通过螺栓拉紧;模型后段与模型前段通过螺纹固定连接。 4、进一步地,所述的动态支撑装置包括俯仰滚转双自由度调整机构、滚转轴自动锁紧机构、俯仰轴自动锁紧机构、滚转轴角位移测量装置和俯仰轴角位移测量装置; 5、其中,俯仰滚转双自由度调整机构是动态支撑装置的主体结构,位于模型后段的中心轴线上;滚转轴自动锁紧机构和滚转轴角位移测量装置固定安装在俯仰滚转双自由度调整机构的滚转轴上;俯仰轴自动锁紧机构和俯仰轴角位移测量装置固定安装在俯仰滚转双自由度调整机构的俯仰轴上。 6、进一步地,所述的俯仰滚转双自由度调整机构包括俯仰轴、俯仰轴瓦、滚转轴、滚转轴瓦、滚转轴外壳和天平连接法兰;俯仰轴瓦和滚转轴瓦均为气浮轴承; 7、滚转轴外壳为方形壳体,位于模型后段的中心轴线上;滚转轴外壳的上表面和下表面分别固定连接模型后段的外壳连接板; 8、滚转轴从后至前穿入滚转轴外壳;在滚转轴的中段,通过一对滚转轴瓦与滚转轴外壳连接;在滚转轴的后端,通过尾支杆连接法兰连接尾支杆;在滚转轴的前端,通过滚转前盖板固定滚转轴瓦和滚转轴; 9、两个俯仰轴分别通过沿周向均匀分布的螺钉,左右对称固定在滚转轴外壳的左右两侧;两个俯仰轴分别通过对应的俯仰轴瓦连接对应的俯仰轴外壳;两个俯仰轴端盖通过螺钉固定在对应的俯仰轴外壳上;天平连接法兰与两个俯仰轴外壳通过螺钉固定,形成组合体,组合体套装在滚转轴外壳上;测力天平通过天平连接法兰连接组合体; 10、俯仰轴瓦与滚转轴瓦均采用偏心不对称空腔设计;俯仰轴外壳与俯仰轴瓦构成俯仰轴的径向气浮轴承,承受俯仰轴承的径向载荷;俯仰轴端面与俯仰轴端盖构成俯仰轴的轴向气浮轴承,承受俯仰轴承的轴向载荷;滚转轴瓦与滚转轴外壳构成滚转轴的径向气浮轴承,承受滚转轴承的径向载荷;滚转轴端面与滚转轴前盖板、滚转轴后盖构成滚转轴的轴向气浮轴承,承受滚转轴承的轴向载荷;共同实现俯仰和滚转动态调整; 11、测力天平与俯仰轴外壳绕俯仰轴自由运动;测力天平与俯仰轴外壳、滚转轴外壳绕滚转轴自由运动,实现两个自由度的动态调整。 12、进一步地,所述的滚转轴自动锁紧机构和俯仰轴自动锁紧机构,均采用气动刹车锁紧; 13、滚转轴自动锁紧机构位于尾支杆连接法兰的前方,包括从前至后顺序套装在滚转轴的后段上的滚转轴后盖、滚转轴弹性体和锁紧端盖;滚转轴弹性体通过沿周向均布的螺栓固定在滚转轴后盖上,再通过锁紧端盖进行螺纹锁紧;滚转轴自动锁紧机构绕滚转轴后段转动;当滚转轴弹性体的端面腔室通入高压气体时,在气体压力的作用下,滚转轴弹性体发生弹性变形,端面腔室的外侧锥面与滚转轴后盖压紧,利用滚转轴弹性体与滚转轴后盖之间的静摩擦提供制动力矩,实现滚转轴自动锁紧机构锁紧; 14、俯仰轴自动锁紧机构包括滚转轴外壳、俯仰轴弹性体和俯仰轴外壳;俯仰轴自动锁紧机构绕俯仰轴转动;当俯仰轴弹性体的端面腔室通入高压气体时,在气体压力的作用下,俯仰轴弹性体发生弹性变形,俯仰轴弹性体与俯仰轴外壳压紧,利用俯仰轴弹性体与俯仰轴外壳之间的静摩擦提供制动力矩,实现俯仰轴自动锁紧机构锁紧。 15、进一步地,所述的滚转轴角位移测量装置和俯仰轴角位移测量装置均采用旋转变压器测量旋转角位移和速度,旋转变压器内的定子与转子具有气隙,不发生直接接触,降低了摩擦阻力,减小了摩擦阻力对动态试验模型的干扰;当转子旋转时,两相输出线圈绕组的输出电压随转子变化,旋转变压器的磁导率随旋转角变化符合正弦分布; 16、滚转轴角位移测量装置包括对应的旋变定子、旋变转子、旋变支架和旋变锁紧螺母,旋变锁紧螺母与滚转前盖板固连,旋变定子通过旋变锁紧螺母固定在滚转轴的前端;滚转轴角位移测量装置随滚转轴外壳转动,旋变定子、旋变转子之间产生与滚转轴外壳相同的转动,并实时输出滚转角位移信号; 17、俯仰轴角位移测量装置包括对应的旋变定子、旋变转子、旋变支架和旋变锁紧螺母,旋变锁紧螺母与俯仰轴端盖固连,旋变定子通过旋变锁紧螺母固定在俯仰轴上;俯仰轴角位移测量装置随俯仰轴外壳转动,旋变定子、旋变转子之间产生与俯仰轴外壳相同的转动,并实时输出俯仰角位移信号。 18、进一步地,所述的旋转变压器为多摩川ts型旋转变压器,角度分辨率为16位,且角位移测量范围无限制,角位移测量范围及精度均满足使用要求。 19、本发明的基于气浮轴承支撑的俯仰滚转双自由度风洞动态试验装置,具有以下特点: 20、a.结构紧凑,体积较小,动态试验模型能够方便地进行安装和拆卸;动态支撑装置能够内置于动态试验模型内部,与风洞流场互不产生干扰,符合高超声速风洞试验的基本要求;选用的轴承组件满足动态风洞试验过程中的气动载荷特性,轴承的直径较小,产生的滚转摩擦力矩较小;试验过程中,支撑的动态试验模型能够实现滚转和俯仰两个自由度低摩擦地自由转动,能够调整两个自由度的初始位置,并通过锁紧机构自动锁紧和解锁; 21、b.采用天平在前的连接形式,接口位置处于动态试验模型的中部,试验过程中动态试验模型在该部位的温度上升相对缓慢,有利于降低试验过程中天平的温度效应; 22、c.包含俯仰以及滚转两个自由度,采用气动刹车锁紧,不会引入电磁信号的干扰; 23、d.采用非对称腔气浮轴承支撑的动态结构,运动阻尼小、承载相对较大、测量精度更高;使用的旋转变压器结构紧凑、测量精度高。 24、总而言之,本发明的基于气浮轴承支撑的俯仰滚转双自由度风洞动态试验装置采用天平在前的非对称气浮结构,具有结构简单、紧凑、刚度高、体积小、承载能力强、气动阻尼小等特点,适用于高超声速风洞动态风洞试验。能够调整滚转和俯仰两个自由度的姿态,并通过锁紧装置自动锁紧和解锁;能够实时反馈动态试验模型的位姿参数和气动载荷;便于安装和拆卸动态试验模型。 25、简而言之,本发明的基于气浮轴承支撑的俯仰滚转双自由度风洞动态试验装置能够满足开展高超声速飞行器飞行动态风洞试验的动态支撑要求。 |
【本文地址】
今日新闻 |
推荐新闻 |