线阵相机:原理,技术及应用 |
您所在的位置:网站首页 › 频闪照相的原理 › 线阵相机:原理,技术及应用 |
线阵相机:原理,技术及应用
|
线阵相机:原理,技术及应用
为什么会需要线阵相机?a.被拍摄物的特殊性b.对光的均匀性,要求很高c.成本考量
什么是线阵相机?线阵相机怎么拍出一幅“面阵”图像?线阵相机的行频与面阵相机的帧率线阵相机的触发方式:行触发与帧触发理想行频与运动速度、客户要求精度
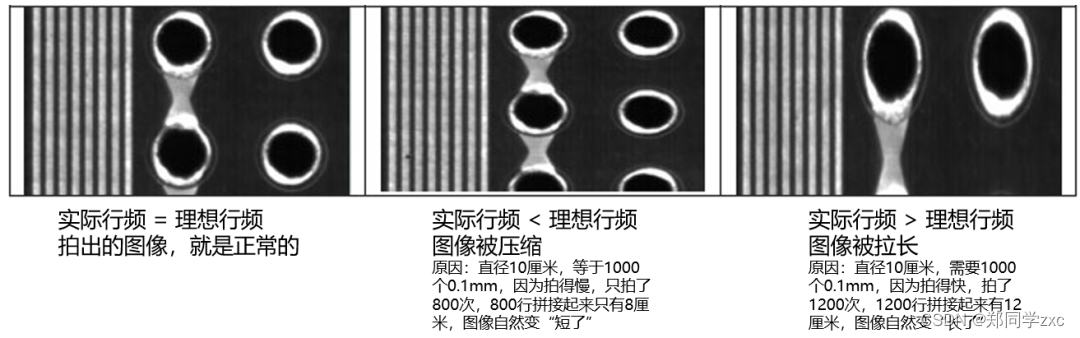
实际行频与运动速度、理想行频的关系线阵相机怎么拍摄彩色图像?黑白线阵相机有几行?黑白线阵相机的多线技术:TDI下列限制,使得TDI有了用武之地。
线阵相机的多线技术:分时频闪线阵相机如何选型
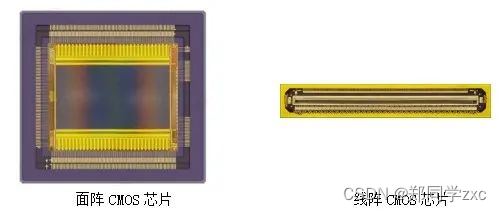
近几年,随着线阵相机的普及,更多的行业,在机器视觉应用方案中,使用线阵相机。 线阵相机的优势很突出,困难也很突出 — 开发和部署,比面阵相机更复杂。 这篇文章,把线阵相机的相关基础知识,做了一个总的梳理和归纳,希望对使用线阵相机的您,有所助益。 为什么会需要线阵相机?客户使用线阵相机的原因、场景很多,总结起来,基本是下面三个因素: a.被拍摄物的特殊性• 运动着的,无限长的被拍摄物,如布匹、钢带、薄膜材料、纸张 • 传送带上大小,颜色、分布各异的产品:果蔬、矿石、金属零件等 • 圆柱形物体:易拉罐、滚筒装置 b.对光的均匀性,要求很高• 线阵光源比面阵光源,更容易实现打光的均匀性 c.成本考量• 1台线阵相机 vs 多台面阵相机:成本更低,部署更方便。 • 线阵相机 vs 高分辨率面阵相机:成本更低。 例如,高分辨率平板检测行业,使用高分辨率面阵相机,成本很高,而用线阵相机,成本可以低很多。同时,屏幕的外形特点,也对线阵相机很友好:长宽均匀。线阵相机从上往下扫描一遍,可达到高分辨率面阵相机的成像效果。 什么是线阵相机?线阵相机,顾名思义,拍出的图像,像一条线,故,称之为线阵相机。 线阵相机和面阵相机的区别,从使用的芯片开始,就大不同: 线阵相机工作原理
线阵和面阵相机的拍照方式不同点
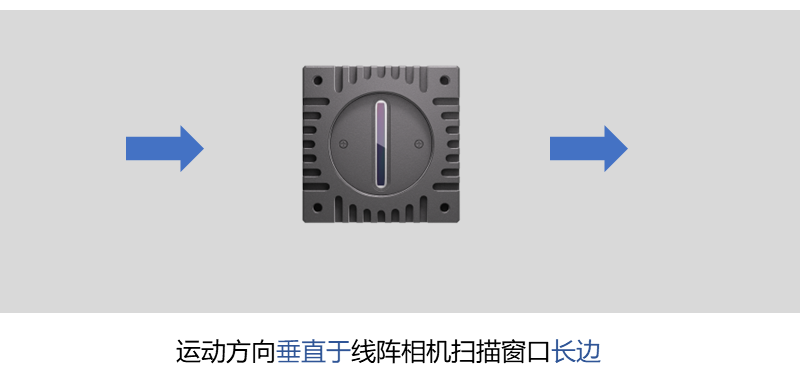
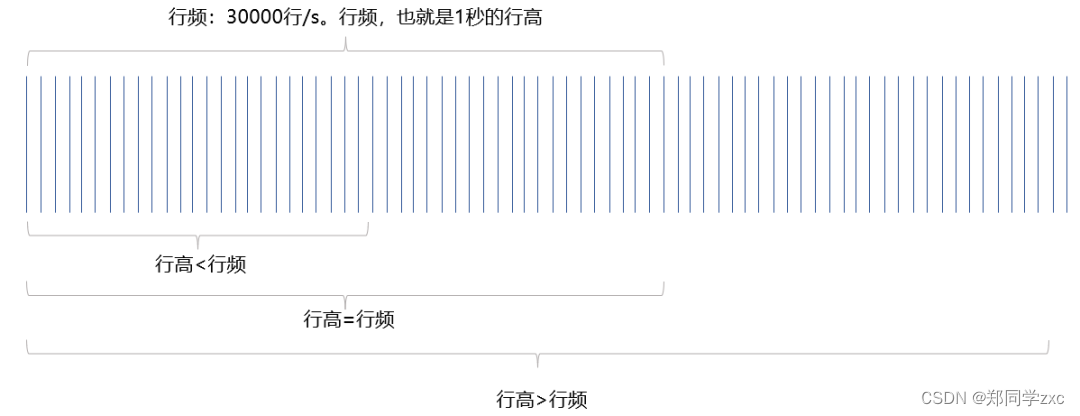
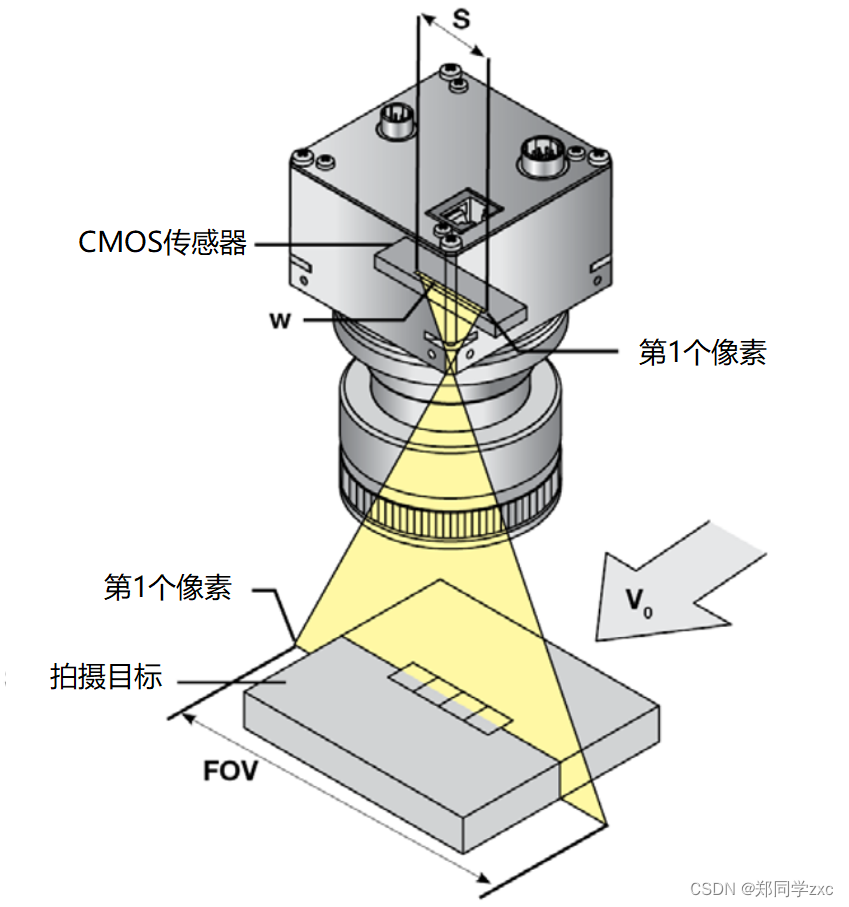
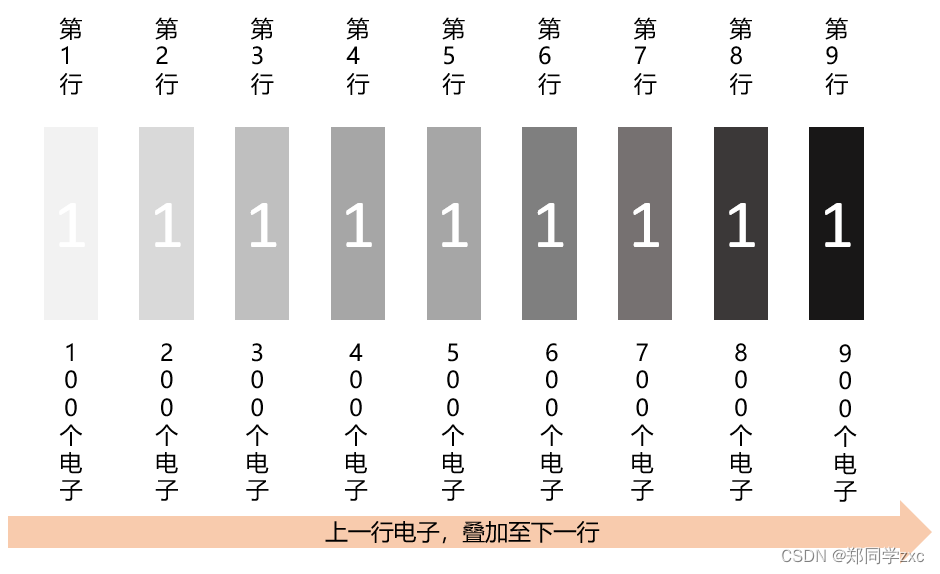
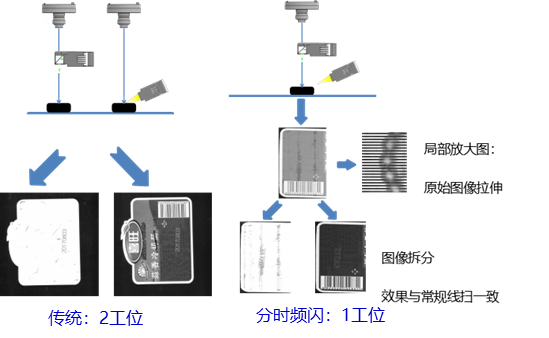
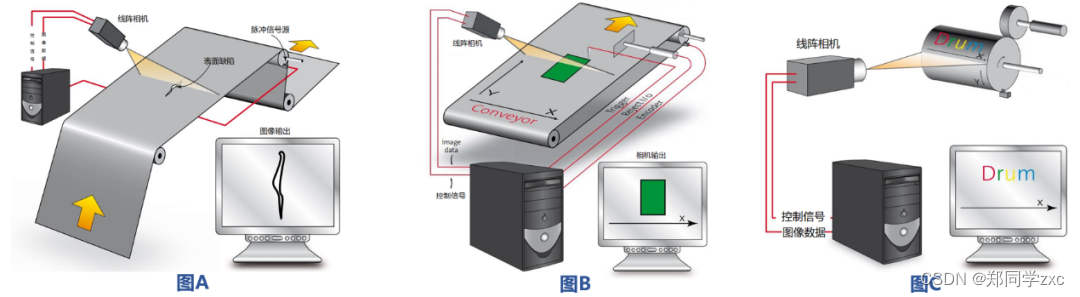
线阵相机的拍摄方向 • 帧率,是相机的拍照速度,通常用每秒拍的图像张数来定义。它的单位是FPS,即Frame per Second • 行频,其实是一种特殊的帧率:针对只有几行像素的的CMOS,其拍照速度很快,能达到每秒几万张-几十万张,说出来很吓人,但因为拍出来的图,近似一条线,不能直接用,为避免误解,就不把它叫帧率,而叫行频。 说到频率,大家首先会想到波,周期。 如果把上图蓝色线条(线阵相机的一次拍照,一幅线状图像)想象为波峰,一秒中出现的红线次数,就是这个波的频率。 这也是“行频” 这个词的由来。 线阵相机的行高 • 理论上来说,线阵相机可以无限拍下去,通过拼接,我们能得到一幅无限长的图像。 • 无限长意味着无限大,这样的图像,这样的数据量,没有任何计算机能处理。 • 所以,实际应用中,都需要根据应用需求,每拍了X行后,就截取一幅图像。 • 这个X行,就是行高,就是这幅图像有多少像素“高” 行触发 • 线阵相机接收到行触发信号后,就拍一行图像。 • 行触发适用于运动速度不那么均匀,或需要用到一些特殊成像技术的场景,例如:长短曝光HDR,分时频闪等,这些都需要用到行触发。 帧触发 • 线阵相机接收到帧触发信号后,就拍一帧图像。这里的一帧图像,可自定义行高。帧触发后,线阵相机一直按设定行频拍照,直到达到指定行高。 • 帧触发,比较适用于运动比较匀速的物体拍摄。 理想行频与运动速度、客户要求精度什么是理想行频? 拍照速度,要与运动速度匹配,才能拍出清晰的图像。理想行频,就是与被拍摄物运动速度相匹配的行频。每一个具体应用,其理想行频,都不相同。 • 客户要求精度。一般客户说精度要达到0.xmm,表达的意思,是拍出来的图像,要能分辨这个长或宽为0.xmm的图案。而要达到这个要求,一般就需要用2-5个像素,来表现、呈现这个0.xmm。这样,图像算法或人的大脑,看到这幅图像时,就能比较容易的找到、识别出,检测出这个0.xmm的图案。 • 像素精度。如下图所示,像素精度,就是被拍摄目标的一段长度,用多少个像素在该目标上的投影,来代表和表达。一个像素,与物体距离的远近,决定了其能表达的长度(精度):可以是0.1mm,也可以是几米,甚至几光年(韦伯望远镜) • 像素都是正方形,所以,也就决定了,X方向精度 = Y方向精度。 • 理想行频 = 运动速度/像素精度。例如,一个物体,运动速度2000mm/s,像素精度0.1mm,则理想行频 = 2000mm/s / 0.1mm = 20000/s,即20k(这个公式的另一层意思,是2000mm,可以划分成多少个0.1mm)。 • 分辨率;如果该物体宽1000mm,像素精度0.1mm,考虑到两侧冗余,则分辨率 = 1050/0.1=10500,即,这个精度下,需要10500个像素,才能对这么宽的物体进行清晰的成像。 像素精度确定的前提下,运动速度越快,理想行频越高。 彩色图像,包括了R,G,B三个分量,因此,线阵相机要拍彩色图像,也需要对三个分量进行采集。 如下图所示,是常见的线阵相机R、G、B分量采集模式: 黑白图像,只有1维变量,即灰度值。所以,在光照足够的情况下,1行线阵相机,即可对目标清晰成像。 那为什么还有2行,4行,8行,甚至16行的黑白线阵相机呢? 这是因为: • 一些应用,难以安装光源,光照充足这个条件不好满足,于是用TDI技术来实现弱光情况下的清晰成像(TDI技术本文后面会讲到)。 • 分时频闪技术(本文后面会讲到),需要用到多行线阵相机。 • 长短曝光技术(本文后面会讲到),需要用到多行线阵相机。 黑白线阵相机的多线技术:TDI在比较暗的环境下拍照,清晰成像的条件,是CMOS芯片获取足够的光,而获得足够光的方法有: 方案1:增加单位时间的光照强度(光源、大镜头收集光) 方案2:增加CMOS感光时长(延长曝光时间) 方案3:增加CMOS的感光面积(大靶面大像元) 小故事: 7月12日,webb望远镜的第一张正式星空照片,用12.5小时的曝光时间,获得了比哈勃望远镜10天曝光时间更清晰的成像。主要原因就是webb望远镜收集光的能力更强 — 镜片更大。 下列限制,使得TDI有了用武之地。a. 由于线阵相机的拍照频率(行频),要与运动速度保持匹配,所以,曝光时间不能随意增加,方案2不能用。 b. 而某些场景下,又无法增强光照(狭小空间),方案1不能用。 c. 用大靶面CMOS芯片,成本太高,或体积太大,无法在现场安装,方案3不能用。 TDI的本质:用不同行的芯片区域,对物体同一个区域拍照,每一行被光子激发的电子,都叠加到下一行,让下一行间接获得了上一行的“光”,经过多次叠加后,最后一行的图像就足够“亮”,足够清晰了。 TDI成像效果:从第1行到第10行,图像逐渐变明亮、清晰。 TDI成像效果:光伏行业案例 下列限制,使得TDI有了用武之地。 a. 由于线阵相机的拍照频率(行频),要与运动速度保持匹配,所以,曝光时间不能随意增加,方案2不能用。 b. 而某些场景下,又无法增强光照(狭小空间),方案1不能用。 c. 用大靶面CMOS芯片,成本太高,或体积太大,无法在现场安装,方案3不能用。 线阵相机的多线技术:分时频闪分时频闪,是一种特殊的线阵扫描方式。 区别于传统线阵扫描的恒定照明方式,分时频闪控制器在线阵相机每采集一行图像时切换光源的种类或亮度,使得多种光源成像有序地间隔排列在图像中。(是不是与长短曝光技术很像?但HDR长短曝光,光源是恒定的;而分时频闪,更多是为了获取不同角度或波长的光照效果) 采集完成后对原始图像进行拆分重组,即可在一次扫描中获得多种光源效果图像,从而降低成本,提高兼容性,获得最佳成像效果。 是奇数行短曝光还是偶数行短曝光,这个无所谓。重点是隔行长、短曝光就行 线阵相机选型的基本步骤如下: 1.计算分辨率:幅宽/最小检测精度=每行需要的像素(图A:幅宽>>被拍摄物;图B:幅宽>被拍摄物;图C:幅宽≈被拍摄物 ) 2.确定像素精度:幅宽/像素数=像素精度 3.确定行频:每秒运动速度/像素精度=理想行频 4.根据分辨率与行频,选定相机
|
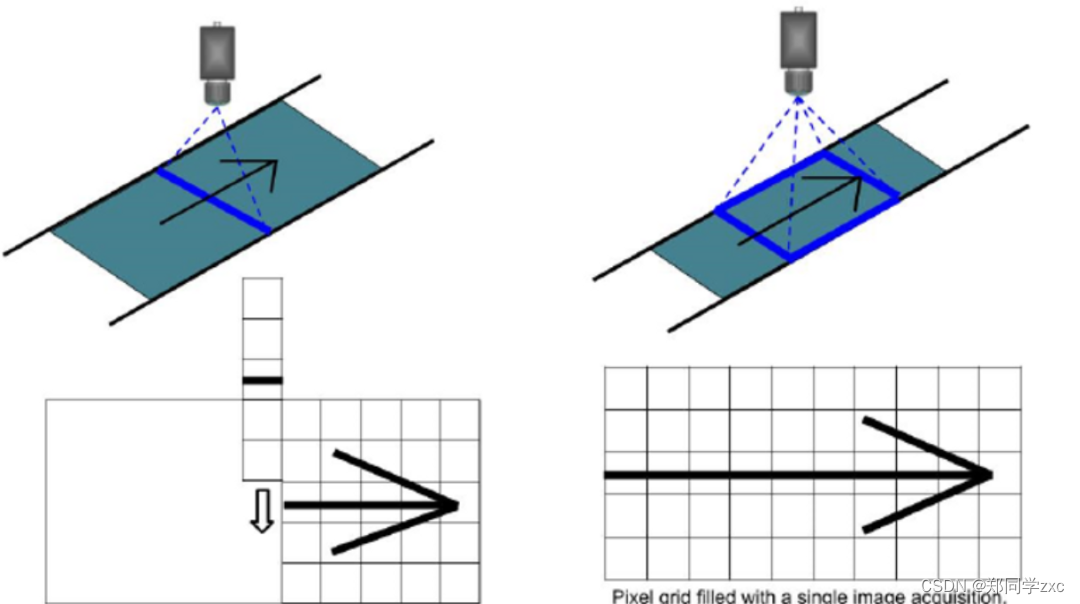
 面阵相机和线阵相机每次曝光拍照,成像对比:
面阵相机和线阵相机每次曝光拍照,成像对比: 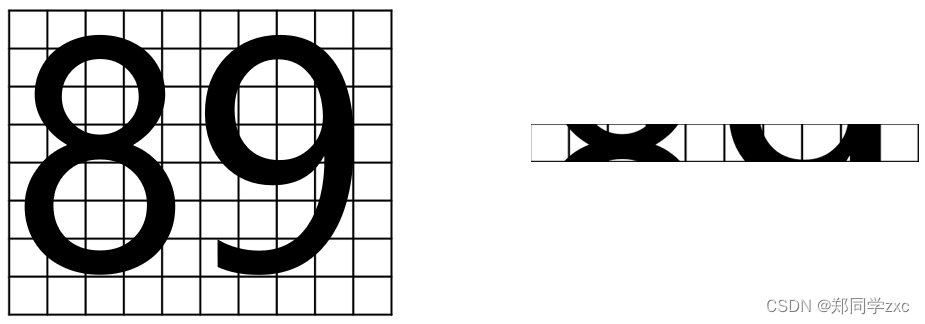 上图,每个方框,代表1个像素。
上图,每个方框,代表1个像素。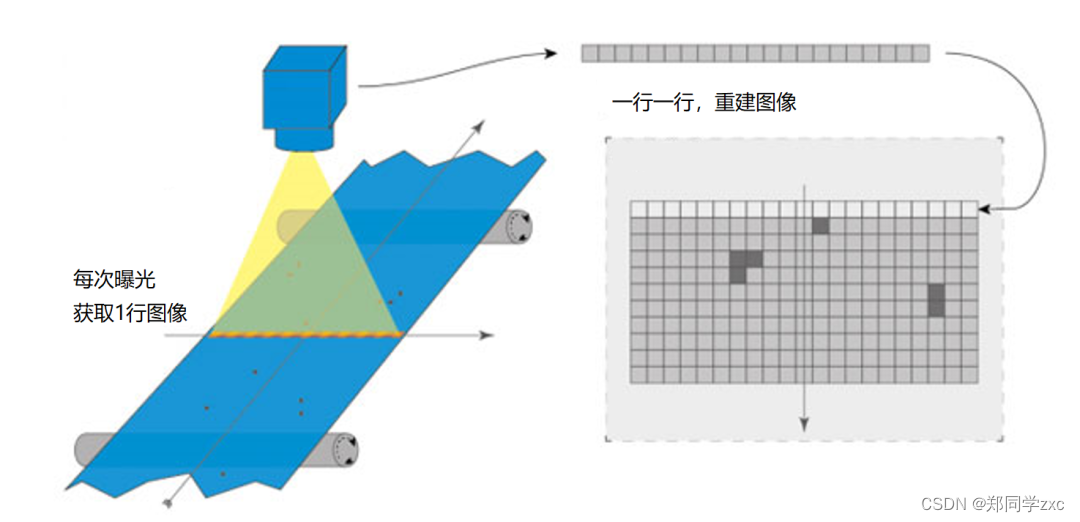 注意:这里说的每次曝光,获取1行图像,是指线阵相机里的CMOS传感器的一行进行了拍照。不表示最终输出的图像,就是由这1行CMOS芯片输出的。最终输出的图像,可能是由1行,2行,3行,4行,6行,8行或16行CMOS芯片拍摄的图像处理而来,最终获得1行图像。
注意:这里说的每次曝光,获取1行图像,是指线阵相机里的CMOS传感器的一行进行了拍照。不表示最终输出的图像,就是由这1行CMOS芯片输出的。最终输出的图像,可能是由1行,2行,3行,4行,6行,8行或16行CMOS芯片拍摄的图像处理而来,最终获得1行图像。 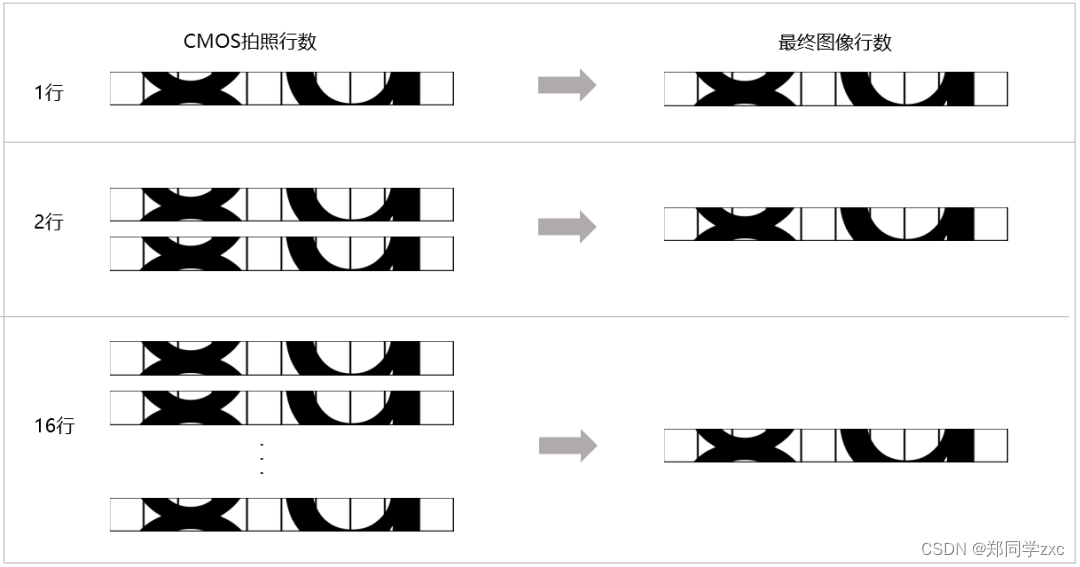
 在电脑里看到的图像: • 每一行图像,是线阵相机拍1-16行,再进行图像处理后得来(不排除未来还会有超过16行的应用) • 每一幅图像,是每一行图像拼接而来
在电脑里看到的图像: • 每一行图像,是线阵相机拍1-16行,再进行图像处理后得来(不排除未来还会有超过16行的应用) • 每一幅图像,是每一行图像拼接而来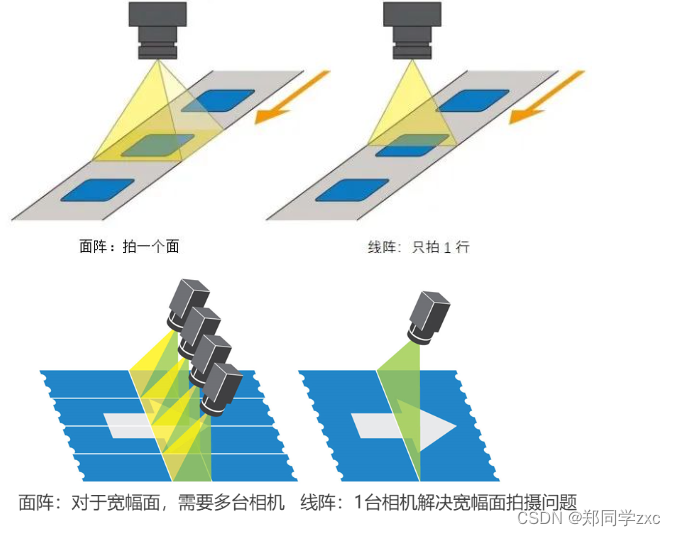 线阵相机 vs 面阵相机,主要优势
线阵相机 vs 面阵相机,主要优势 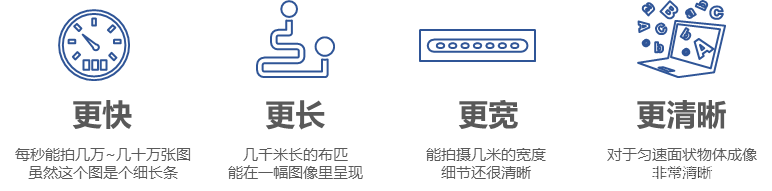


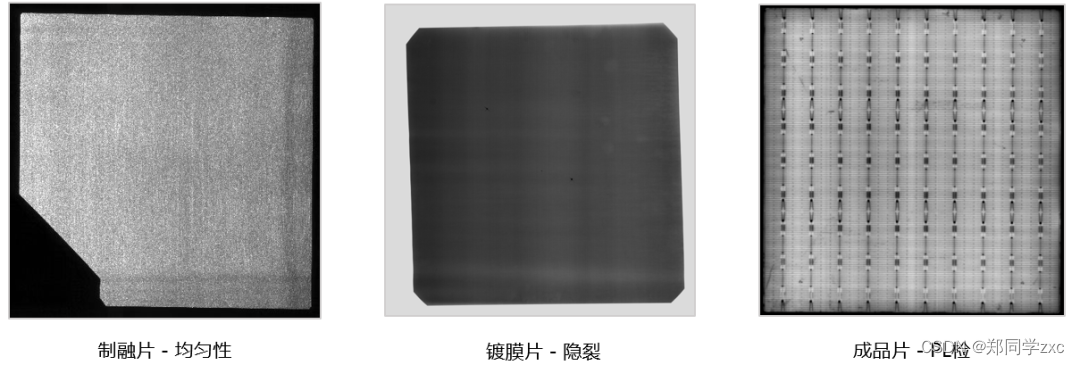
 分时频闪在光伏行业的实际应用案例
分时频闪在光伏行业的实际应用案例 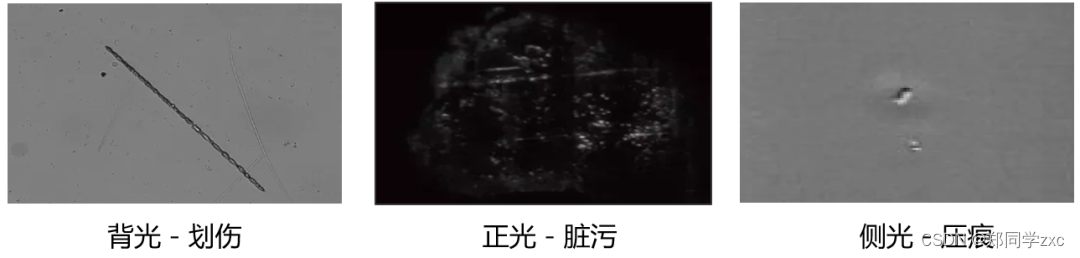 线阵相机的多线技术:长短曝光HDR 什么是HDR:High Dynamic Range,高动态范围。HDR主要作用,就是让一幅图片里 • 暗的地方(欠曝),变亮点 • 亮的地方(过曝),变暗点 用大白话来形容HDR,就是:对被拍摄物不同区域的光照明暗,有更强的适应性,让各个区域都能清晰地成像。
线阵相机的多线技术:长短曝光HDR 什么是HDR:High Dynamic Range,高动态范围。HDR主要作用,就是让一幅图片里 • 暗的地方(欠曝),变亮点 • 亮的地方(过曝),变暗点 用大白话来形容HDR,就是:对被拍摄物不同区域的光照明暗,有更强的适应性,让各个区域都能清晰地成像。 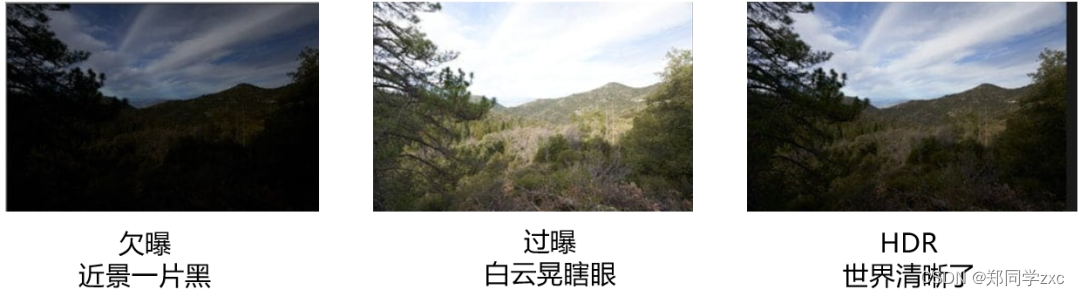 HDR的实现方式有很多种,对于线阵相机,有一种实现技术,叫长短曝光 • 奇数行:短曝光 • 偶数行:长曝光 • 最终获得2幅图像,用算法,将2幅图像合并为一幅,就得到一个HDR图像。
HDR的实现方式有很多种,对于线阵相机,有一种实现技术,叫长短曝光 • 奇数行:短曝光 • 偶数行:长曝光 • 最终获得2幅图像,用算法,将2幅图像合并为一幅,就得到一个HDR图像。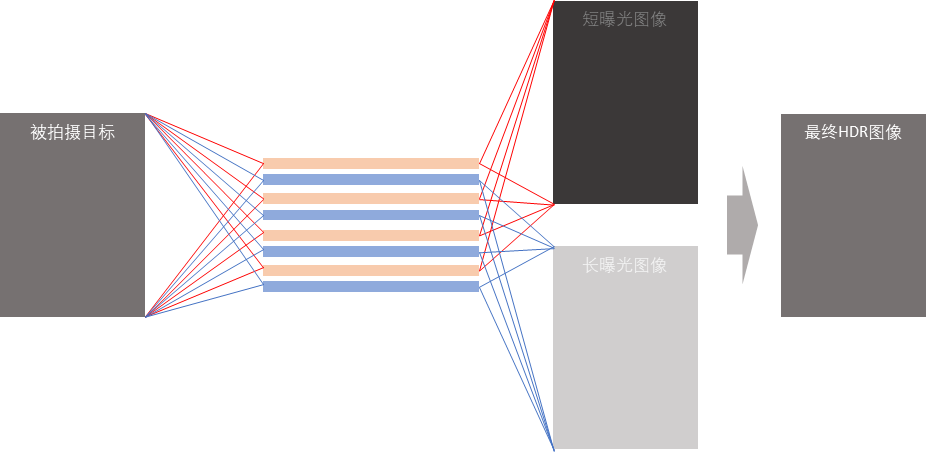 长短曝光HDR在光伏行业的应用案例:
长短曝光HDR在光伏行业的应用案例: 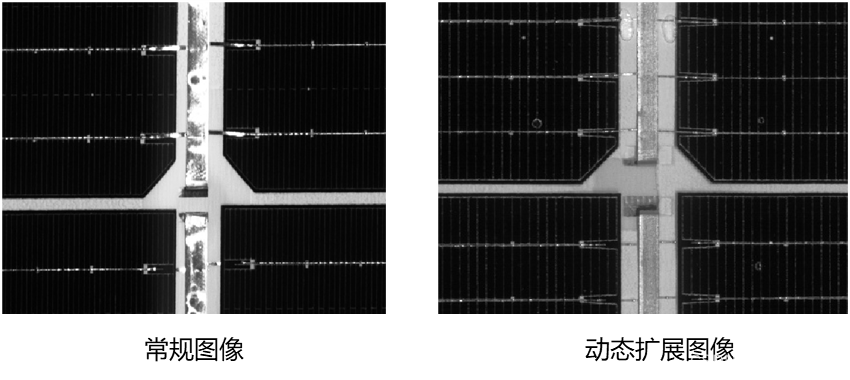
 计算实例:
计算实例:【本文地址】