毫米波雷达(mmWave)基本原理 |
您所在的位置:网站首页 › 雷达美容是什么原理的 › 毫米波雷达(mmWave)基本原理 |
毫米波雷达(mmWave)基本原理
|
1. 引言
毫米波(mmWave)是一种特殊的雷达技术,它使用短波长的电磁波。雷达系统发射电磁波信号,然后其路径上的物体将它反射回去。通过捕捉反射信号,雷达系统可以确定目标的距离、速度和角度。毫米波雷达发射的信号波长在毫米范围内。这被认为是电磁波谱中的短波长,是该技术的优点之一。实际上,处理毫米波信号所需的天线等系统组件的尺寸很小。短波长的另一个优点是精度高。工作在 76-81 GHz(相应波长约为 4 毫米)的毫米波系统将能够检测到小到 1 毫米的运动。一个完整的毫米波雷达系统包括发射(TX)和接收(RX)射频(RF)组件;如时钟这样的模拟元件;如模数转换器(ADC)、微控制器(MCU)和数字信号处理器(DSP)这样的数字元件。以前,这些系统采用离散元件实现,这增加了功耗和整体系统成本。由于系统的复杂性和高频率,系统设计具有挑战性。Texas Instruments (TI) 已经解决了这些挑战,并设计了基于互补金属氧化物半导体(CMOS)的毫米波雷达器件,该器件集成了 TX-RF 和 RX-RF 、模拟组件(如时钟)以及数字组件(如 ADC、MCU 和硬件加速器)。TI 毫米波传感器产品组合中的一些系列集成了 DSP ,来提供额外的信号处理功能。TI 实现了一种特殊的毫米波技术,称为调频连续波(FMCW)。顾名思义, FMCW 雷达连续发射调频信号,以测量距离、角度和速度。这与传统的脉冲雷达系统不同,后者周期性地发射短脉冲。 2. 测距雷达系统的基本概念是物体在其路径上反射的电磁信号的传输。在 FMCW 雷达使用的信号中,频率随时间线性增加。这种类型的信号也被称为 chirp 。下图显示了 chirp 信号 A-t 函数表示。 频率混频器是一种电子元件,它将两个信号组合在一起,产生一个具有新频率的新信号 对于输入的两个正弦信号 x 1 x_1 x1 和 x 2 x_2 x2 x 1 = s i n ( ω 1 t + Φ 1 ) x_1 = sin(\omega_1t+\varPhi_1) x1=sin(ω1t+Φ1)(1) x 2 = s i n ( ω 2 t + Φ 2 ) x_2 = sin(\omega_2t+\varPhi_2) x2=sin(ω2t+Φ2)(2) 输出 x o u t x_{out} xout的瞬时频率等于两个输入正弦波的瞬时频率之差。输出 x o u t x_{out} xout的相位等于两个输入信号的相位差: x o u t = s i n [ ( ω 1 − ω 2 ) t + ( Φ 1 − Φ 2 ) ] x_{out}=sin[(\omega_1-\omega_2)t+(\varPhi_1-\varPhi_2)] xout=sin[(ω1−ω2)t+(Φ1−Φ2)](3) 混频器的操作也可以通过查看 TX 和 RX 的 chirp 频率和关于时间的函数来图形化地理解。 下图中的上图显示了检测到的单个对象的 TX 和 RX chirp 作为时间的函数。注意,RX chirp 是TX chirp 的延时版本。 时间延迟(t)可以由下式推导出 τ = 2 d c \tau=\frac {2d} c τ=c2d(4) d是到被探测物体的距离,c是光速 为了得到混频器输出的中频信号关于时间的函数表示,减去下图上半部分所示的两条线,两条线之间的距离是固定的,这意味着中频信号由一个频率恒定的波形组成。中频信号仅在 TX chirp 和 RX chirp 重叠的时间间隔内有效(即下图中垂直虚线之间的间隔)。混频器输出信号关于时间和幅值函数是正弦波,因为它具有恒定的频率。 中频信号的初始相位( Φ 0 \varPhi_0 Φ0)是中频信号开始时对应的时间瞬间(即上图中左侧垂直虚线所表示的时间瞬间)TX chirp 的相位与RX chirp 的相位之差(如下式): Φ 0 = 2 π f c τ \varPhi_0 = 2\pi f_c\tau Φ0=2πfcτ(5) 更进一步的可以被推导为下式 Φ 0 = 4 π d λ \varPhi_0 = \frac {4 \pi d} \lambda Φ0=λ4πd(6)1 综上所述,对于距离雷达d处的目标,中频信号为如下式的正弦波 A s i n ( 2 π f 0 t + Φ 0 ) Asin(2\pi f_0 t+\varPhi_0) Asin(2πf0t+Φ0)(7)2 其中: f 0 = S 2 d c f_0 = \frac {S2d} c f0=cS2d, Φ 0 = 4 π d λ \varPhi_0 = \frac {4 \pi d} \lambda Φ0=λ4πd 目前的假设是雷达只探测到一个物体。让我们分析一个检测到多个对象的情况。下图显示了从不同对象接收到的三种不同的 RX chirp 。每个 chirp 的延迟时间与目标的距离成正比。不同的 RX chirp 转换成多个中频信号,每个频率恒定。 在本节中,让我们使用相量符号(距离,角度)表示复数。 3.1 双 chirp 测速为了测量速度,FMCW 雷达发送两个
T
c
T_c
Tc 间隔的 chirps 。每个反射的 chirp 经过 FFT 处理来检测目标的范围(range- FFT),每个 chirp 对应的 range-FFT 在相同的位置有峰值,但相位不同。测量到的相位差对应于
v
T
c
vTc
vTc 物体的运动。 由(6)可得相位差如下式: Δ Φ = 4 π v T c λ \Delta\varPhi = \frac {4 \pi v T_c } \lambda ΔΦ=λ4πvTc(10) 可以推导出速度如下式 v = λ Δ Φ 4 π T c v = \frac {\lambda \Delta \varPhi} {4\pi T_c} v=4πTcλΔΦ(11) 由于速度测量是基于相位差的,只有当 ∣ Δ Φ ∣ < π \mid{\Delta \varPhi }\mid |
 下图也显示了 chirp ,频率是时间的函数。chirp 的特征是起始频率(fc),带宽(B)和持续时间(Tc)。chirp 的斜率(S)捕获频率的变化率。其中 fc = 77 GHz, B = 4 GHz, Tc = 40 μs, S = 100 MHz/μs
下图也显示了 chirp ,频率是时间的函数。chirp 的特征是起始频率(fc),带宽(B)和持续时间(Tc)。chirp 的斜率(S)捕获频率的变化率。其中 fc = 77 GHz, B = 4 GHz, Tc = 40 μs, S = 100 MHz/μs 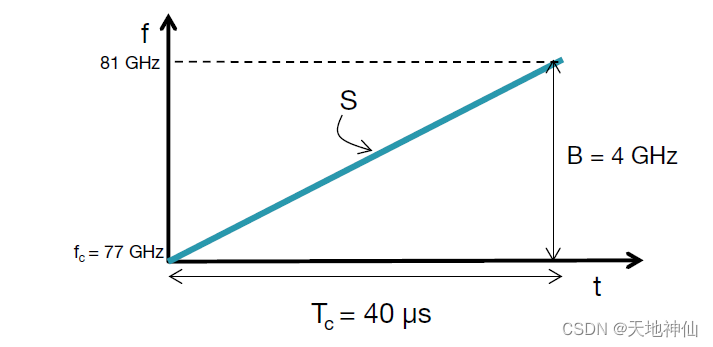 FMCW 雷达系统发送 chirp 信号并捕获其路径上物体反射的信号。 下图是 FMCW 雷达主要射频组件的简化框图。
FMCW 雷达系统发送 chirp 信号并捕获其路径上物体反射的信号。 下图是 FMCW 雷达主要射频组件的简化框图。 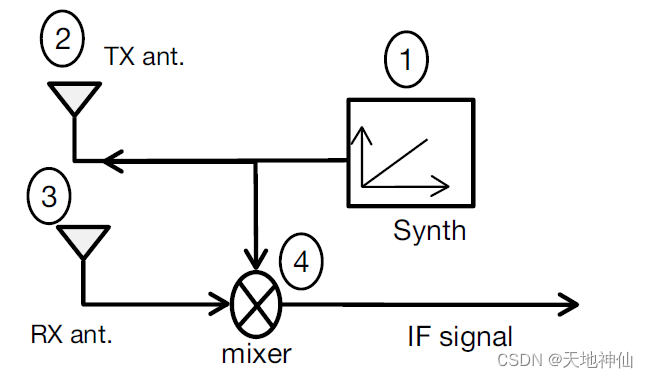 雷达的工作原理如下:
雷达的工作原理如下: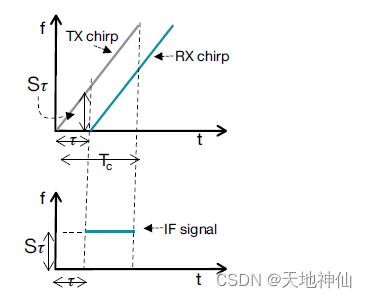
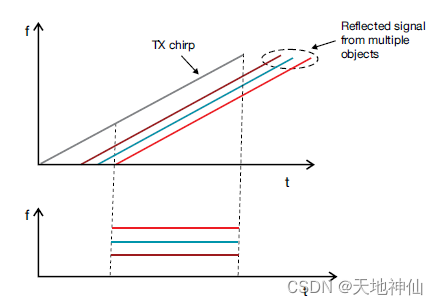 这个由多个信号组成的中频信号必须使用傅里叶变换进行处理,以便分离不同的信号。傅里叶变换处理产生的频谱将会对不同的信号产生不同的峰值,每一个峰值都表示了一个特定距离的物体
这个由多个信号组成的中频信号必须使用傅里叶变换进行处理,以便分离不同的信号。傅里叶变换处理产生的频谱将会对不同的信号产生不同的峰值,每一个峰值都表示了一个特定距离的物体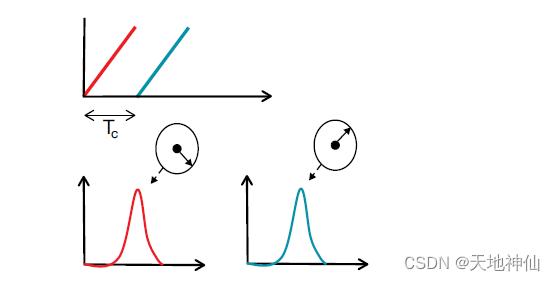
【本文地址】
今日新闻 |
推荐新闻 |