计算机视觉教程7 |
您所在的位置:网站首页 › 醒图图片拼接边缘融合 › 计算机视觉教程7 |
计算机视觉教程7
|
目录
0 效果展示1 系统架构设计2 软件架构设计3 特征匹配4 生成特征描述子5 图像拼接与配准6 图像平滑与美化
0 效果展示
待拼接图片: 


拼接后图片:
主要采用:暴力匹配、最值匹配、交叉匹配、KNN匹配、RANSAC匹配
单纯靠特征匹配是不够的,因为会引入大量误匹配点,需要进行匹配优化 Lowe’s匹配优化:Lowe’s 匹配优化算法核心原理是:通过 K K K近邻查找算法,选择 K K K个和目标特征点最相似的点,若这 K K K个匹配对间的区别足够大,则选择最相似的作为目标特征点的匹配点,否则舍弃。 由于本项目针对的目标图像尺寸较小,因此通常选择 K = 2 K=2 K=2,即最近邻匹配。 2个点间的区别用距离比率 α = d ( F d s t , F a ) d ( F d s t , F b ) \alpha =\frac{d\left( F_{dst},F_a \right)}{d\left( F_{dst},F_b \right)} α=d(Fdst,Fb)d(Fdst,Fa) 来衡量,比率阈值根据不同的特征检测算法有所不同,达到此比率则认为目标特征点的两个匹配对区别足够大,可以加入优秀匹配点集。 此外上述的距离相似度度量 d d d对不同的检测算法亦有区别,本项目中对于ORB、BRISK等二进制描述算法采用汉明距离度量,在保证精度的情况下大幅提高匹配效率;对于SIFT、SURF等浮点型描述算法则采用 L 2 L2 L2范数度量。 值得注意的是,在算法开始前需要比较两个输入特征描述子的尺寸,因为在特征匹配时匹配器有两个参数——查询索引(Query Index)与匹配索引(Train Index),当使用特征较多的描述子去查询特征较少的描述子时可能发生向量越界的情况,因此算法统一使用小特征描述子去查询大特征描述子中对应的匹配点。
主要采用了下面四种方法
方法是计算相邻两张待拼接图片间的单应性矩阵,然后将其中一张图片通过单应性矩阵映射到另一张图片的坐标系即可。 考虑到RANSAC算法能够对计算单应性矩阵选取的参数进行迭代,并根据内集合的评判结果选取效果更好的匹配关键点计算得到的单应性矩阵,最终计算得到的单应性矩阵能适应最大数量的关键点,因此使用RANSAC算法计算得到的单应性矩阵应用于图像拼接后能得到最好的效果。 自定义RANSAC单应性矩阵算法应用于图像拼接的结果与使用findHomography库函数的RANSAC方法的结果对比如图所示。
同时对比代码的运行结果如图所示,可以看出自定义的RANSAC求解算法和库函数中直接调用的RANSAC计算方式会产生约为0.5%的误差,可以视为算法的误差,可能由在单应性矩阵计算过程中变量类型转换过程中,变量在float和double类型之间转换产生的数据溢出和对于置信度取值不同等原因导致,在实际应用中可忽略不计。
方法:拉普拉斯金字塔融合
🚀 计算机视觉基础教程说明 章号 内容 0 色彩空间与数字成像 1 计算机几何基础 2 图像增强、滤波、金字塔 3 图像特征提取 4 图像特征描述 5 图像特征匹配 6 立体视觉 7 项目实战 🔥 更多精彩专栏: 《ROS从入门到精通》《机器人原理与技术》《机器学习强基计划》《计算机视觉教程》… 👇源码获取 · 技术交流 · 抱团学习 · 咨询分享 请联系👇 |





 可以看出,优化的效果还是很明显的
可以看出,优化的效果还是很明显的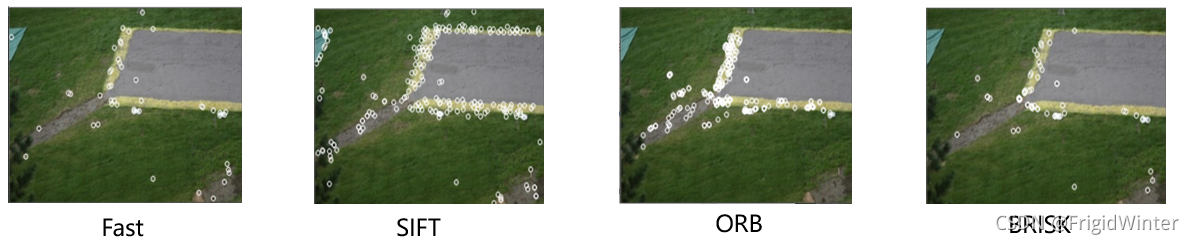 从实验结果看,SIFT算法性能最佳
从实验结果看,SIFT算法性能最佳 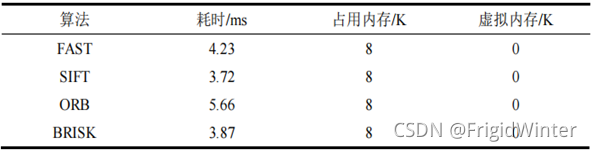




 最终效果:
最终效果:  本文的完整工程代码请通过下方名片联系我获取
本文的完整工程代码请通过下方名片联系我获取【本文地址】