嵌入式开发 |
您所在的位置:网站首页 › 逐行扫描法代码 › 嵌入式开发 |
嵌入式开发
|
文章目录
一、前言1、矩阵键盘是什么2、矩阵键盘的应用场景3、矩阵键盘的替代品3、矩阵键盘的优缺点
二、矩阵键盘按键检测原理1、逐行逐列扫描法2、反线法
三、矩阵键盘按键检测程序实现
一、前言
1、矩阵键盘是什么
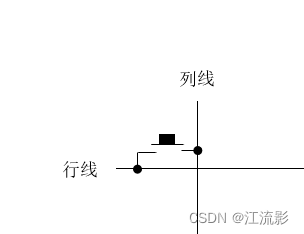
矩阵键盘很好理解,就是排布类似矩阵的按键,大家可以想一下点阵的外形。大概长下面这个样子 矩阵键盘一般应用在需要用到大量按键的场景,主要是为了节省按键使用的IO资源。比如一个项目需要用到16个按键,如果使用普通的独立按键,每一个按键都需要一个IO,16个按键就需要16个IO。对于珍贵的IO资源看来说,只是为了实现简单的按键检测就占用那么多,实在是一种浪费。而如果将这16个按键换成一个4*4的矩阵键盘,只需要8根线就可以实现16个按键的检测,能够节省很多IO资源。 3、矩阵键盘的替代品相比于矩阵按键,也可以采用一些编码器来实现,原理于矩阵键盘相同,都是给每一个按键对应一个固定位数的二进制数。只不过矩阵键盘需要软件自己检测每一个IO上的高低电平信息,得到一个二进制数。而利用编码器就是将这一步交给硬件实现,硬件会直接根据按键按下的位置自己产生一个固定位数的二进制数,软件直接检测二进制数即可。利用编码器实现的话软件方面会减少一些工作,检测起来更加方便,而且通过硬件直接输出二进制数比软件自己检测更加可靠。 3、矩阵键盘的优缺点1)使用矩阵键盘优点在于可以用相对较少的IO实现多个按键的检测。 2)缺点也较为明显,如果有多个按键同时按下无法检测出具体按下了哪几个,对于一些按键需求多,而且需要一次开启多个或者需要同时控制的应用场景,矩阵键盘并不太适用。 二、矩阵键盘按键检测原理检测方法主要有两种,一种是逐行逐列扫描法,另一种是反线法,常用的是逐行逐列扫描法。接下来以4*4矩阵键盘为例,介绍一下这两种方法。在此之前可以先看一下矩阵键盘中按键的连接方法,带着下面这个硬件连接示意图去看软件检测原理。 4根行线,4根列线。首先MCU给4个列线的IO输出低电平,4个行线的IO输出高电平。当没有按键按下时,四条行线所连接的IO引脚读取到的将全部是高电平。而当有按键按下时,由于按键按下,导致该按键所在的行列线接通,本身高电平的行线电平被拉低。此时读取所有行线的IO电平可以得知有按键按下。 判断有按键按下后行线IO依旧保持高电平,逐列将列线IO电平置低,读取行线IO电平,如果在一条列线为低电平的时候检测到某一条行线为高电平。此时可以根据行线列线8个IO的电平状态得到一个特定的16进制数,根据这个16进制数可以确定具体是哪个按键按下。 2、反线法反线法也较为简单,判断是否有按键按下的方法与逐行伫列扫描法相同,首先MCU给4个列线的IO输出低电平,4个行线的IO输出高电平。当没有按键按下时,四条行线所连接的IO引脚读取到的将全部是高电平。而当有按键按下时,由于按键按下,导致该按键所在的行列线接通,本身高电平的行线电平被拉低。此时读取所有行线的IO电平,可以得知有按键按下,同时也能知道被按下的按键位于哪一行。 不同的是后续反线法会将行线IO电平拉低,列线电平IO拉高,这也是这种方法叫做反线法的原因。同样的方法会检测到列线有一条与行线接通,导致电平被拉低。这样又能得出被按下的按键所在的列。如此一来行列确定后就能够确定被按下按键的具体位置。 个人还是更加倾向于逐行逐列扫描法的。 三、矩阵键盘按键检测程序实现矩阵键盘的检测整理来讲还是比较简单的,这里以STM32F103系列单片机为例,附上一个4*4矩阵键盘检测的程序。 #include "keyboad.h" #include "delay.h" void keyboad_Init() { GPIO_InitTypeDef GPIO_InitStructure;//定义结构体变量 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE); GPIO_InitStructure.GPIO_Pin=GPIO_Pin_0|GPIO_Pin_1|GPIO_Pin_2|GPIO_Pin_3; //选择你要设置的IO口 GPIO_InitStructure.GPIO_Mode=GPIO_Mode_Out_PP; //设置推挽输出模式 GPIO_InitStructure.GPIO_Speed=GPIO_Speed_10MHz; //设置传输速率 GPIO_Init(GPIOA,&GPIO_InitStructure); /* 初始化GPIO */ GPIO_InitStructure.GPIO_Pin=GPIO_Pin_4|GPIO_Pin_5|GPIO_Pin_6|GPIO_Pin_7; //选择你要设置的IO口 GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IPD; //设置下拉输入模式 GPIO_InitStructure.GPIO_Speed=GPIO_Speed_10MHz; //设置传输速率 GPIO_Init(GPIOA,&GPIO_InitStructure); /* 初始化GPIO */ GPIO_SetBits(GPIOA,GPIO_Pin_0|GPIO_Pin_1|GPIO_Pin_2|GPIO_Pin_3); GPIO_ResetBits(GPIOA,GPIO_Pin_4|GPIO_Pin_5|GPIO_Pin_6|GPIO_Pin_7); } u8 Read_KeyValue() { u8 KeyValue=0; if((GPIO_ReadInputData(GPIOA)&0xff)!=0x0f) { delay_ms(10); if((GPIO_ReadInputData(GPIOA)&0xff)!=0x0f) { GPIO_SetBits(GPIOA,GPIO_Pin_0); GPIO_ResetBits(GPIOA,GPIO_Pin_1|GPIO_Pin_2|GPIO_Pin_3); switch(GPIO_ReadInputData(GPIOA)&0xff) { case 0x11: KeyValue=1;break; case 0x21: KeyValue=5;break; case 0x41: KeyValue=9;break; case 0x81: KeyValue=13;break; } GPIO_SetBits(GPIOA,GPIO_Pin_1); GPIO_ResetBits(GPIOA,GPIO_Pin_0|GPIO_Pin_2|GPIO_Pin_3); switch(GPIO_ReadInputData(GPIOA)&0xff) { case 0x12: KeyValue=2;break; case 0x22: KeyValue=6;break; case 0x42: KeyValue=10;break; case 0x82: KeyValue=14;break; } GPIO_SetBits(GPIOA,GPIO_Pin_2); GPIO_ResetBits(GPIOA,GPIO_Pin_0|GPIO_Pin_1|GPIO_Pin_3); switch(GPIO_ReadInputData(GPIOA)&0xff) { case 0x14: KeyValue=3;break; case 0x24: KeyValue=7;break; case 0x44: KeyValue=11;break; case 0x84: KeyValue=15;break; } GPIO_SetBits(GPIOA,GPIO_Pin_3); GPIO_ResetBits(GPIOA,GPIO_Pin_0|GPIO_Pin_1|GPIO_Pin_2); switch(GPIO_ReadInputData(GPIOA)&0xff) { case 0x18: KeyValue=4;break; case 0x28: KeyValue=8;break; case 0x48: KeyValue=12;break; case 0x88: KeyValue=16;break; } GPIO_SetBits(GPIOA,GPIO_Pin_0|GPIO_Pin_1|GPIO_Pin_2|GPIO_Pin_3); GPIO_ResetBits(GPIOA,GPIO_Pin_4|GPIO_Pin_5|GPIO_Pin_6|GPIO_Pin_7); while((GPIO_ReadInputData(GPIOA)&0xff)!=0x0f); return KeyValue; } } return 0; } |

【本文地址】
今日新闻 |
推荐新闻 |