UR5 D |
您所在的位置:网站首页 › 连杆的结构和连接关系是什么样的 › UR5 D |
UR5 D
|
这个问题遇到好多次了,不管是仿真还是可视化,都需要我清楚的掌握ur5的URDF信息。但是看官网的Ur5.urdf真的是看的迷迷糊糊的,总是无法把ur5机器人的某个部位和她的名字对应起来。之前都搞不太明白,今天好好整理一下,分享给大家。 首先是官方的Ur5.urdf地址下面画的图都是根据官方的ur5.urdf文件,(中文翻译可能有点不准确)。 D-H参数 D-H参数官方文件里有,我拷贝到这里,供查阅 简洁版本 这个版本是我们平时最常用最基础的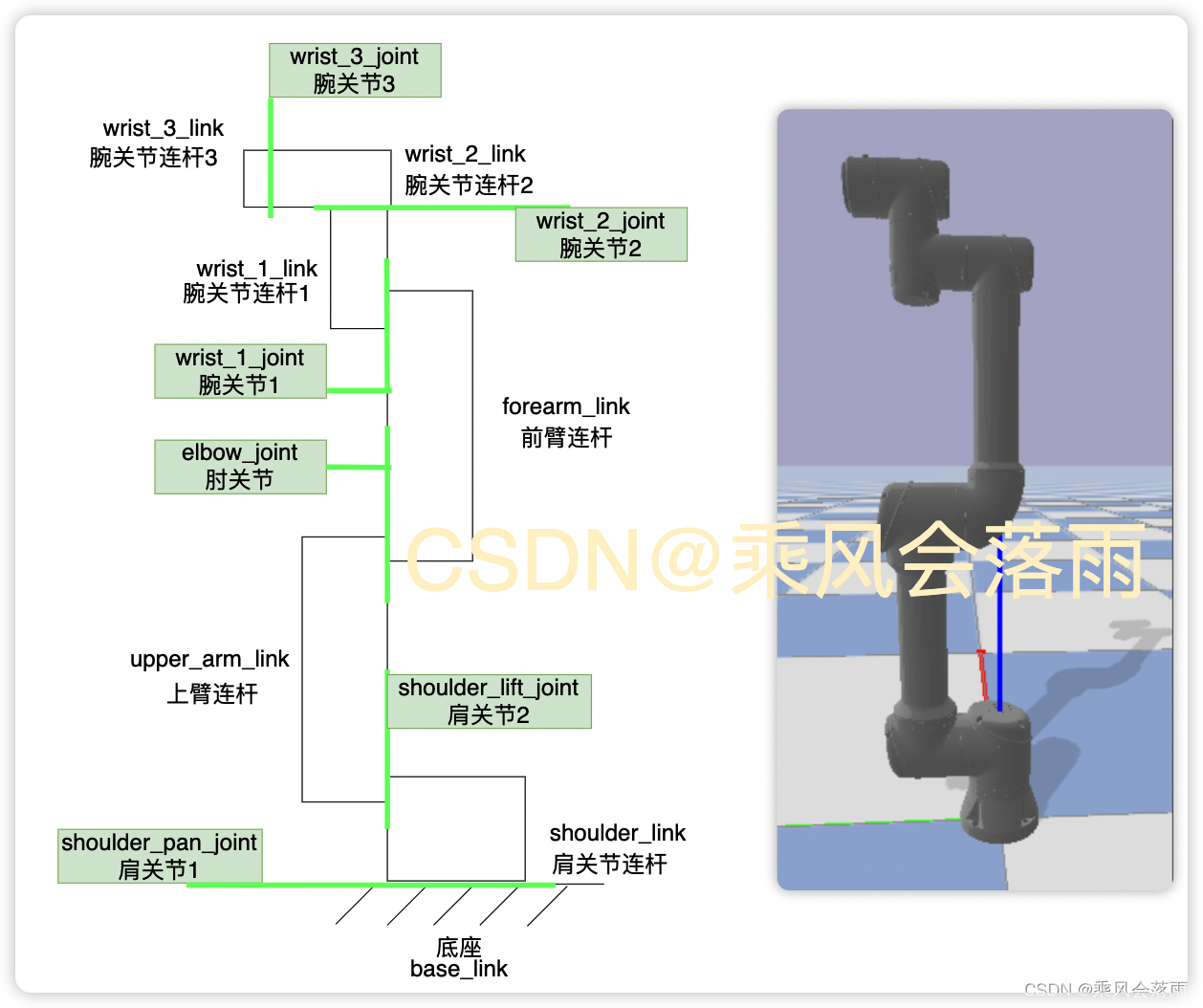 完全契合urdf文件
完全契合urdf文件
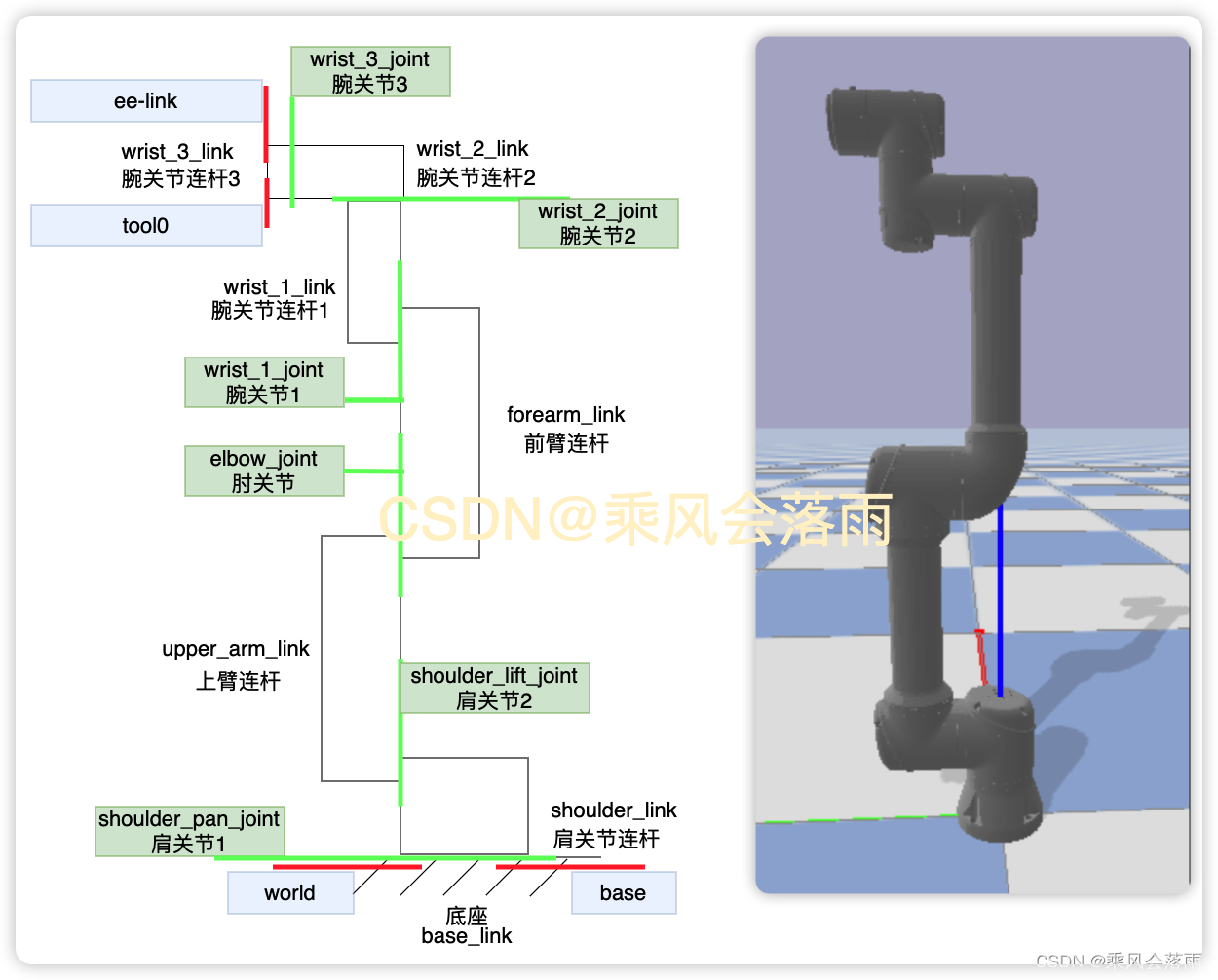
我们发现urdf里还有什么world,base这些,我们依次画出并给出解释
其实感觉留个base就行了吧,太累赘冗余了,我也有点疑问,以后解决了再来补充。 |
【本文地址】
今日新闻 |
推荐新闻 |