OpenCV计算机视觉学习(8) |
您所在的位置:网站首页 › 轮廓计算机 › OpenCV计算机视觉学习(8) |
OpenCV计算机视觉学习(8)
|
如果需要处理的原图及代码,请移步小编的GitHub地址
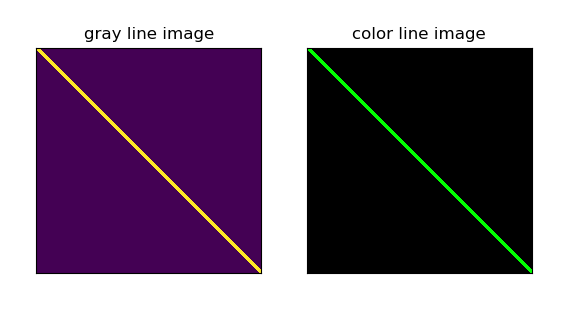
传送门:请点击我 如果点击有误:https://github.com/LeBron-Jian/ComputerVisionPractice 1,简单几何图像绘制简单几何图像一般包括点,直线,矩阵,圆,椭圆,多边形等等。 下面学习一下 opencv对像素点的定义。图像的一个像素点有1或3个值,对灰度图像有一个灰度值,对彩色图像有3个值组成一个像素值,他们表现出不同的颜色。 其实有了点才能组成各种多边形,才能对多边形进行轮廓检测,所以下面先练习一下简单的几何图像绘制。 1.1 绘制直线在OpenCV中,绘制直线使用的函数为 line() ,其函数原型如下: def line(img, pt1, pt2, color, thickness=None, lineType=None, shift=None): # real signature unknown; restored from __doc__ """ line(img, pt1, pt2, color[, thickness[, lineType[, shift]]]) -> img . @brief Draws a line segment connecting two points. . . The function line draws the line segment between pt1 and pt2 points in the image. The line is . clipped by the image boundaries. For non-antialiased lines with integer coordinates, the 8-connected . or 4-connected Bresenham algorithm is used. Thick lines are drawn with rounding endings. Antialiased . lines are drawn using Gaussian filtering. . . @param img Image. . @param pt1 First point of the line segment. . @param pt2 Second point of the line segment. . @param color Line color. . @param thickness Line thickness. . @param lineType Type of the line. See #LineTypes. . @param shift Number of fractional bits in the point coordinates. """ pass可以看到这个函数主要接受参数为两个点的坐标,线的颜色(其中灰色图为一个数字,彩色图为1*3的数组)。 实践代码如下: import cv2 import numpy as np import matplotlib.pyplot as plt # 生成一个空灰度图像 img1 = np.zeros((400, 400), np.uint8) img1 = cv2.line(img1, (0, 0), (400, 400), 255, 5) # 生成一个空彩色图像 img3 = np.zeros((400, 400, 3), np.uint8) img3 = cv2.line(img3, (0, 0), (400, 400), (0, 255, 0), 5) titles = ['gray line image', 'color line image'] res = [img1, img3] for i in range(2): plt.subplot(1, 2, i+1) plt.imshow(res[i]), plt.title(titles[i]) plt.xticks([]), plt.yticks([]) plt.show()效果如下:
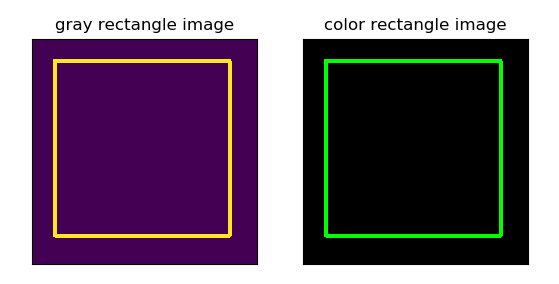
注意1:在这里再强调一下,由于cv和matplotlib的读取图像通道不同,导致灰度图和彩色图的颜色不一样,如果想分开看,可以直接使用cv2.imshow()。 注意2:绘制图像是在原图上绘制,这里我们写的是专门在原图上绘制,后面draw轮廓的话,可能需要 img.copy()了。不然我们的原图会存在画的轮廓。 1.2 绘制矩阵在OpenCV中,绘制直线使用的函数为 rectangel() ,其函数原型如下: def rectangle(img, pt1, pt2, color, thickness=None, lineType=None, shift=None): # real signature unknown; restored from __doc__ """ rectangle(img, pt1, pt2, color[, thickness[, lineType[, shift]]]) -> img . @brief Draws a simple, thick, or filled up-right rectangle. . . The function cv::rectangle draws a rectangle outline or a filled rectangle whose two opposite corners . are pt1 and pt2. . . @param img Image. . @param pt1 Vertex of the rectangle. . @param pt2 Vertex of the rectangle opposite to pt1 . . @param color Rectangle color or brightness (grayscale image). . @param thickness Thickness of lines that make up the rectangle. Negative values, like #FILLED, . mean that the function has to draw a filled rectangle. . @param lineType Type of the line. See #LineTypes . @param shift Number of fractional bits in the point coordinates. rectangle(img, rec, color[, thickness[, lineType[, shift]]]) -> img . @overload . . use `rec` parameter as alternative specification of the drawn rectangle: `r.tl() and . r.br()-Point(1,1)` are opposite corners """ pass参数解释 第一个参数img:img是原图 第二个参数pt1:(x,y)是矩阵的左上点坐标 第三个参数pt2:(x+w,y+h)是矩阵的右下点坐标 第四个参数color:(0,255,0)是画线对应的rgb颜色 第五个参数thickness:2是所画的线的宽度cv2.rectangle(img, (10, 10), (390, 390), (255, 0, 0), 3),需要确定的就是矩形的两个点(左上角与右下角),颜色,线的类型(不设置就默认)。 代码如下: import cv2 import numpy as np import matplotlib.pyplot as plt # 生成一个空灰度图像 img1 = np.zeros((400, 400), np.uint8) img1 = cv2.rectangle(img1, (40, 40), (350, 350), 255, 5) # 生成一个空彩色图像 img3 = np.zeros((400, 400, 3), np.uint8) img3 = cv2.rectangle(img3, (40, 40), (350, 350), (0, 255, 0), 5) titles = ['gray rectangle image', 'color rectangle image'] res = [img1, img3] for i in range(2): plt.subplot(1, 2, i+1) plt.imshow(res[i]), plt.title(titles[i]) plt.xticks([]), plt.yticks([]) plt.show()效果如下:
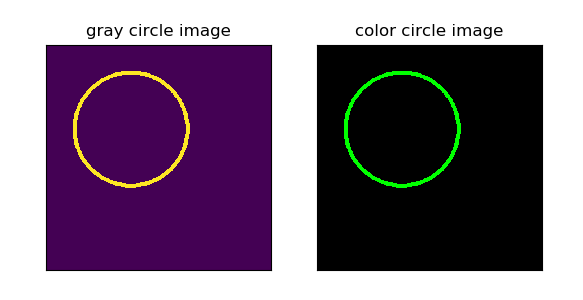
在OpenCV中,绘制直线使用的函数为 circle() ,其函数原型如下: def circle(img, center, radius, color, thickness=None, lineType=None, shift=None): # real signature unknown; restored from __doc__ """ circle(img, center, radius, color[, thickness[, lineType[, shift]]]) -> img . @brief Draws a circle. . . The function cv::circle draws a simple or filled circle with a given center and radius. . @param img Image where the circle is drawn. . @param center Center of the circle. . @param radius Radius of the circle. . @param color Circle color. . @param thickness Thickness of the circle outline, if positive. Negative values, like #FILLED, . mean that a filled circle is to be drawn. . @param lineType Type of the circle boundary. See #LineTypes . @param shift Number of fractional bits in the coordinates of the center and in the radius value. """ pass绘制圆形也简单,只需要确定圆心与半径即可。 实践代码如下: import cv2 import numpy as np import matplotlib.pyplot as plt # 生成一个空灰度图像 img1 = np.zeros((400, 400), np.uint8) img1 = cv2.circle(img1, (150, 150), 100, 255, 5) # 生成一个空彩色图像 img3 = np.zeros((400, 400, 3), np.uint8) img3 = cv2.circle(img3, (150, 150), 100, (0, 255, 0), 5) titles = ['gray circle image', 'color circle image'] res = [img1, img3] for i in range(2): plt.subplot(1, 2, i+1) plt.imshow(res[i]), plt.title(titles[i]) plt.xticks([]), plt.yticks([]) plt.show()效果如下:
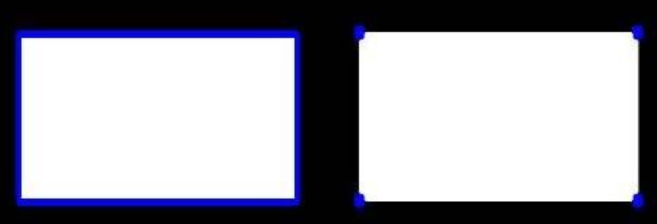
在OpenCV中,绘制直线使用的函数为 ellipse() ,其函数原型如下: def ellipse(img, center, axes, angle, startAngle, endAngle, color, thickness=None, lineType=None, shift=None): # real signature unknown; restored from __doc__ """ ellipse(img, center, axes, angle, startAngle, endAngle, color[, thickness[, lineType[, shift]]]) -> img . @brief Draws a simple or thick elliptic arc or fills an ellipse sector. . . The function cv::ellipse with more parameters draws an ellipse outline, a filled ellipse, an elliptic . arc, or a filled ellipse sector. The drawing code uses general parametric form. . A piecewise-linear curve is used to approximate the elliptic arc . boundary. If you need more control of the ellipse rendering, you can retrieve the curve using . #ellipse2Poly and then render it with #polylines or fill it with #fillPoly. If you use the first . variant of the function and want to draw the whole ellipse, not an arc, pass `startAngle=0` and . `endAngle=360`. If `startAngle` is greater than `endAngle`, they are swapped. The figure below explains . the meaning of the parameters to draw the blue arc. . .  . . @param img Image. . @param center Center of the ellipse. . @param axes Half of the size of the ellipse main axes. . @param angle Ellipse rotation angle in degrees. . @param startAngle Starting angle of the elliptic arc in degrees. . @param endAngle Ending angle of the elliptic arc in degrees. . @param color Ellipse color. . @param thickness Thickness of the ellipse arc outline, if positive. Otherwise, this indicates that . a filled ellipse sector is to be drawn. . @param lineType Type of the ellipse boundary. See #LineTypes . @param shift Number of fractional bits in the coordinates of the center and values of axes. ellipse(img, box, color[, thickness[, lineType]]) -> img . @overload . @param img Image. . @param box Alternative ellipse representation via RotatedRect. This means that the function draws . an ellipse inscribed in the rotated rectangle. . @param color Ellipse color. . @param thickness Thickness of the ellipse arc outline, if positive. Otherwise, this indicates that . a filled ellipse sector is to be drawn. . @param lineType Type of the ellipse boundary. See #LineTypes """ pass这里解释一下参数: img:图像 center:椭圆圆心坐标 axes:轴的长度 angle:偏转的角度 start_angle:圆弧起始角的角度 end_angle:圆弧终结角的角度 color:线条的颜色 thickness:线条的粗细程度 line_type:线条的类型,详情见CVLINE的描述 shift:圆心坐标点的数轴的精度图像化如下:
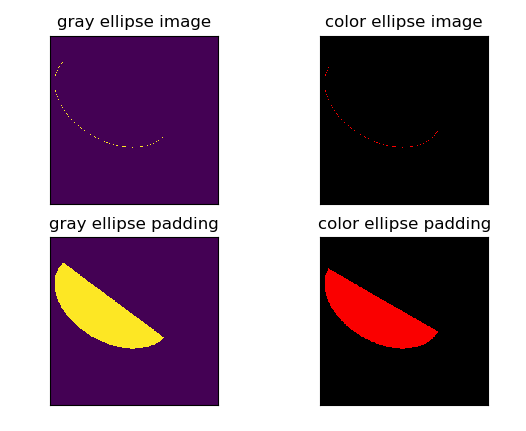
实践代码如下: import cv2 import numpy as np import matplotlib.pyplot as plt # 生成一个空灰度图像 img_origin1 = np.zeros((400, 400), np.uint8) img_origin11 = img_origin1.copy() # 参数依次是:图像,椭圆圆心坐标,轴的长度,偏转的角度, 圆弧起始角的角度,圆弧终结角的角度,线条的颜色,线条的粗细程度,线条的类型 img1 = cv2.ellipse(img_origin1, (150, 150), (150, 100), 30, 10, 190, 250) img11 = cv2.ellipse(img_origin11, (150, 150), (150, 100), 30, 10, 190, 250, -1) # 生成一个空彩色图像 img_origin3 = np.zeros((400, 400, 3), np.uint8) img_origin33 = img_origin3.copy() # 注意最后一个参数 -1,表示对图像进行填充,默认是不填充的,如果去掉,只有椭圆轮廓了 img3 = cv2.ellipse(img_origin3, (150, 150), (150, 100), 30, 0, 180, 250) img33 = cv2.ellipse(img_origin33, (150, 150), (150, 100), 30, 0, 180, 250, -1) titles = ['gray ellipse image', 'color ellipse image', 'gray ellipse padding', 'color ellipse padding'] res = [img1, img3, img11, img33] for i in range(4): plt.subplot(2, 2, i+1) plt.imshow(res[i]), plt.title(titles[i]) plt.xticks([]), plt.yticks([]) plt.show()效果如下:
图像轮廓可以简单认为成将连续的点(连着边界)连在一起的曲线,具有相同的颜色或者灰度。轮廓在形状分析和物体的检测和识别中很有用。 为了更加准确,要使用二值化图像。在寻找轮廓之前,要进行阈值化处理,或者Canny边界检测。 查找轮廓的函数会修改原始图像。如果你在找到轮廓之后还想使用原始图像的话,你应该将原始图像存储到其他变量中。 在OpenCV中,查找轮廓就像在黑色背景中超白色物体。你应该记住要找的物体应该是白色而背景应该是黑色。 2.1 cv2.findContours()函数那么如何在一个二值化图像中查找轮廓呢?这里推荐使用函数cv2.findContours(): 函数cv2.findContours()函数的原型为: cv2.findContours(image, mode, method[, contours[, hierarchy[, offset ]]])注意:opencv2返回两个值:contours:hierarchy。而opencv3会返回三个值,分别是img(图像), countours(轮廓,是一个列表,里面存贮着图像中所有的轮廓,每一个轮廓都是一个numpy数组,包含对象边界点(x, y)的坐标), hierarchy(轮廓的层析结构)。 函数参数: 第一个参数是寻找轮廓的图像,即输入图像; 第二个参数表示轮廓的检索模式,有四种(本文介绍的都是新的cv2接口): cv2.RETR_EXTERNAL: 表示只检测外轮廓 cv2.RETR_LIST: 表示检测所有轮廓,检测的轮廓不建立等级关系,并将其保存到一条链表当中 cv2.RETR_CCOMP :表示检测所有的轮廓,并将他们组织为两层:顶层是各部分的外部边界,第二次是空洞的边界 cv2.RETR_TREE: 表示检测所有轮廓,并重构嵌套轮廓的整个层次,建立一个等级树结构的轮廓第三个参数method为轮廓的近似办法 cv2.CHAIN_APPROX_NONE:以Freeman链码的方式输出轮廓,所有其他方法输出多边形(顶点的序列)。存储所有的轮廓点,相邻的两个点的像素位置差不超过1,即max(abs(x1-x2),abs(y2-y1))==1 cv2.CHAIN_APPROX_SIMPLE:压缩水平方向,垂直方向,对角线方向的元素,只保留该方向的终点坐标,例如一个矩形轮廓只需4个点来保存轮廓信息 cv2.CHAIN_APPROX_TC89_L1,CV_CHAIN_APPROX_TC89_KCOS使用teh-Chinl chain 近似算法这里轮廓的近似的两个方法我们可以从下面图看更加明显:
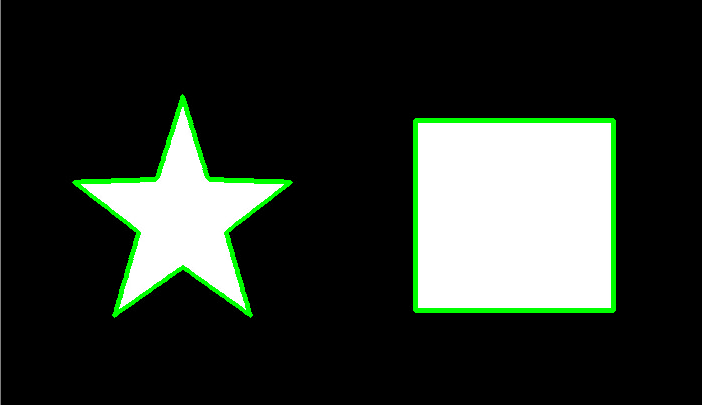
一个是输出所有轮廓(即所有顶点的序列),另一个函数只保留他们的终点部分。 函数返回值: 一般情况下,cv2.findContours()函数返回两个值,一个是轮廓本身,还有一个是每条轮廓对应的属性。当然特殊情况下返回三个值。即第一个是图像本身。 contour返回值 cv2.findContours()函数首先返回一个 list,list中每个元素都是图像中的一个轮廓,用numpy中的ndarray表示。这个概念非常重要,通过下面代码查看: print (type(contours)) print (type(contours[0])) print (len(contours)) ''' 结果如下: 2 '''这里我们使用 contour.jpg 这幅图像举个例子,图如下:
通过上述图,我们会看到本例中有两条轮廓,一个是五角星的,一个是矩形的。每个轮廓是一个 ndarray,每个 ndarray是轮廓上的点的集合,并且打印出list的长度为2。 由于我们知道返回的轮廓有两个,因此可以通过: cv2.drawContours(img,contours[0],0,(0,0,255),3) cv2.drawContours(img,contours[1],0,(0,0,255),3)分别绘制两个轮廓,同时通过: print(len(contours[0])) print(len(contours[1])) ''' 结果如下: 4 368 '''输出两个轮廓中存储的点的个数,可以看出,第一个轮廓中只有四个元素,这是因为轮廓中并不是存储轮廓上所有的点,而是只存储可以用直线描述轮廓的点的个数,比如一个“正立”的矩形,只需要四个顶点就能描述轮廓了。而第二个轮廓却有368个元素,因为它是不规整的图像。 hiarachy返回值 此外,该函数还可返回一个可选的hiararchy结果,这是一个ndarray,其中的元素个数和轮廓个数相同,每个轮廓contours[i]对应4个hierarchy元素hierarchy[i][0] ~hierarchy[i][3],分别表示后一个轮廓、前一个轮廓、父轮廓、内嵌轮廓的索引编号,如果没有对应项,则该值为负数。 print (type(hierarchy)) print (hierarchy.ndim) print (hierarchy[0].ndim) print (hierarchy.shape) ''' 结果如下: 3 2 (1, 2, 4) '''可以看出,hierachy本身包含两个ndarray,每个 ndarray对应一个轮廓,每个轮廓有四个属性。 完整代码如下: import cv2 img = cv2.imread('contour.jpg') gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) ret, thresh = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY) contours, hierarchy = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE) print (type(contours)) print (type(contours[0])) print (len(contours)) ''' 结果如下: 2 ''' print(len(contours[0])) print(len(contours[1])) ''' 结果如下: 4 368 ''' print (type(hierarchy)) print (hierarchy.ndim) print (hierarchy[0].ndim) print (hierarchy.shape) ''' 结果如下: 3 2 (1, 2, 4) ''' # cv2.imshow('thresh', thresh) # cv2.waitKey(0) # cv2.destroyWindow('thresh')2.2 cv2.drawContours() OpenCV中通过 cv2.drawContours在图像上绘制轮廓。 下面看一下cv2.drawContours()函数: cv2.drawContours(image, contours, contourIdx, color[, thickness[, lineType[, hierarchy[, maxLevel[, offset ]]]]])参数: 第一个参数是指明在哪幅图像上绘制轮廓; 第二个参数是轮廓本身,在Python中是一个list。 第三个参数指定绘制轮廓list中的哪条轮廓,如果是-1,则绘制其中的所有轮廓。后面的参数很简单。其中thickness表明轮廓线的宽度,如果是-1(cv2.FILLED),则为填充模式。绘制参数将在以后独立详细介绍。下面看一个实例,在一幅图像上绘制所有的轮廓: #_*_coding:utf-8_*_ import cv2 import numpy as np img_path = 'contour.jpg' img = cv2.imread(img_path) img1 = img.copy() img2 = img.copy() img3 = img.copy() imgray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) _, thresh = cv2.threshold(imgray, 127, 255, cv2.THRESH_BINARY) contours, hierarchy= cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE) # 绘制独立轮廓,如第四个轮廓 img1 = cv2.drawContours(img1, contours, -1, (0, 255, 0), 3) # 如果指定绘制几个轮廓(确保数量在轮廓总数里面),就会只绘制指定数量的轮廓 img2 = cv2.drawContours(img2, contours, 1, (0, 255, 0), 3) img3 = cv2.drawContours(img3, contours, 0, (0, 255, 0), 3) res = np.hstack((img, img1, img2)) cv2.imshow('img', img3) cv2.waitKey(0) cv2.destroyAllWindows()需要注意的是 cv2.findContours()函数接受的参数是二值图,即黑白的(不是灰度图),所以读取的图像先要转化成灰度图,再转化成二值图,后面两行代码分别是检测轮廓,绘制轮廓。 比如原图如下:
检测到的所有轮廓图如下(当指定绘制轮廓参数为 -1 ,默认绘制所有的轮廓):
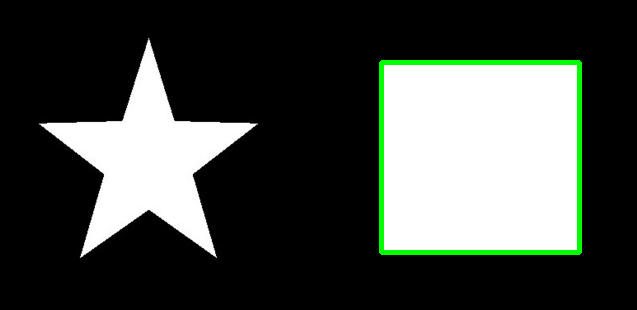
当指定绘制轮廓的参数为 0的时候,则会找到索引为0的图像的轮廓如下:
同理,当指定绘制轮廓的参数为 1的时候,则会找到索引为1的图像的轮廓如下:
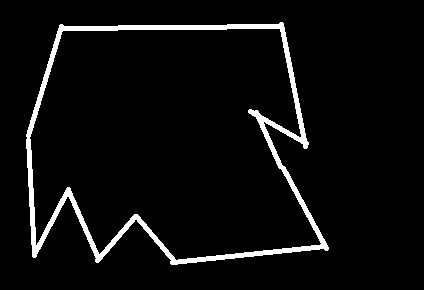
注意:findcontours函数会“原地”修改输入的图像,所以我们需要copy图像,不然原图会变。。。。 2.3 cv2.boundingrect()函数矩形边框(Bounding Rectangle)是说,用一个最小的矩形,把找到的形状包起来。还有一个带旋转的矩形,面积会更小。 首先介绍下cv2.boundingRect(img)这个函数,源码如下: def boundingRect(array): # real signature unknown; restored from __doc__ """ boundingRect(array) -> retval . @brief Calculates the up-right bounding rectangle of a point set or non-zero pixels of gray-scale image. . . The function calculates and returns the minimal up-right bounding rectangle for the specified point set or . non-zero pixels of gray-scale image. . . @param array Input gray-scale image or 2D point set, stored in std::vector or Mat. """ pass解释一下参数的意义:img是一个二值图,也就是它的参数;返回四个值,分别是x,y,w,h( x,y是矩阵左上点的坐标,w,h是矩阵的宽和高); 用下面函数解释更加形象: x, y, w, h = cv2.boudingrect(cnt) # 获得外接矩形 参数说明:x,y, w, h 分别表示外接矩形的x轴和y轴的坐标,以及矩形的宽和高, cnt表示输入的轮廓值得到矩阵的坐标后,然后利用cv2.rectangle(img, (x,y), (x+w,y+h), (0,255,0), 2)画出矩行,我们前面有讲这个函数,这里不再赘述。 下面举个例子来看看如何找出不规则图像的外接矩阵,并画出其矩阵,首先图如下:
我们的目的是找出这个不规则图像的外接矩阵,并展示出来,代码如下: #_*_coding:utf-8_*_ import cv2 import numpy as np img_path = 'contour2.png' img = cv2.imread(img_path) img1 = img.copy() img2 = img.copy() imgray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) _, thresh = cv2.threshold(imgray, 127, 255, cv2.THRESH_BINARY) contours, hierarchy= cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE) print('轮廓的总数为', len(contours)) # 轮廓的总数为 2 cnt = contours[0] x, y, w, h = cv2.boundingRect(cnt) img1 = cv2.rectangle(img1, (x,y), (x+w,y+h), (0, 255, 0), 2) cv2.imshow('img', img1) cv2.waitKey(0) cv2.destroyAllWindows()效果如下:
opencv中使用cv2.contourArea()来计算轮廓的面积。 首先介绍下cv2.contourArea(cnt, True)这个函数,源码如下: def contourArea(contour, oriented=None): # real signature unknown; restored from __doc__ """ contourArea(contour[, oriented]) -> retval . @brief Calculates a contour area. . . The function computes a contour area. Similarly to moments , the area is computed using the Green . formula. Thus, the returned area and the number of non-zero pixels, if you draw the contour using . #drawContours or #fillPoly , can be different. Also, the function will most certainly give a wrong . results for contours with self-intersections. . . Example: . @code . vector contour; . contour.push_back(Point2f(0, 0)); . contour.push_back(Point2f(10, 0)); . contour.push_back(Point2f(10, 10)); . contour.push_back(Point2f(5, 4)); . . double area0 = contourArea(contour); . vector approx; . approxPolyDP(contour, approx, 5, true); . double area1 = contourArea(approx); . . cout retval . @brief Calculates a contour perimeter or a curve length. . . The function computes a curve length or a closed contour perimeter. . . @param curve Input vector of 2D points, stored in std::vector or Mat. . @param closed Flag indicating whether the curve is closed or not. """ pass参数含义如下: curve:输入的二维点集(轮廓顶点),可以是 vector或者Mat类型 closed:用于指示曲线是否封闭下面举个例子: #_*_coding:utf-8_*_ import cv2 import numpy as np img_path = 'contour2.png' img = cv2.imread(img_path) imgray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) _, thresh = cv2.threshold(imgray, 127, 255, cv2.THRESH_BINARY) contours, hierarchy= cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE) cnt = contours[0] # 求轮廓的周长 arcLength = cv2.arcLength(cnt, True) print(img.shape) # (306, 453, 3) print(arcLength) # 1265.96254575252532.6 cv2.approxPolyDP() cv2.approxPolyDP()函数是轮廓近似函数,是opencv中对指定的点集进行多边形逼近的函数,其逼近的精度可通过参数设置。我们首先看一张图:
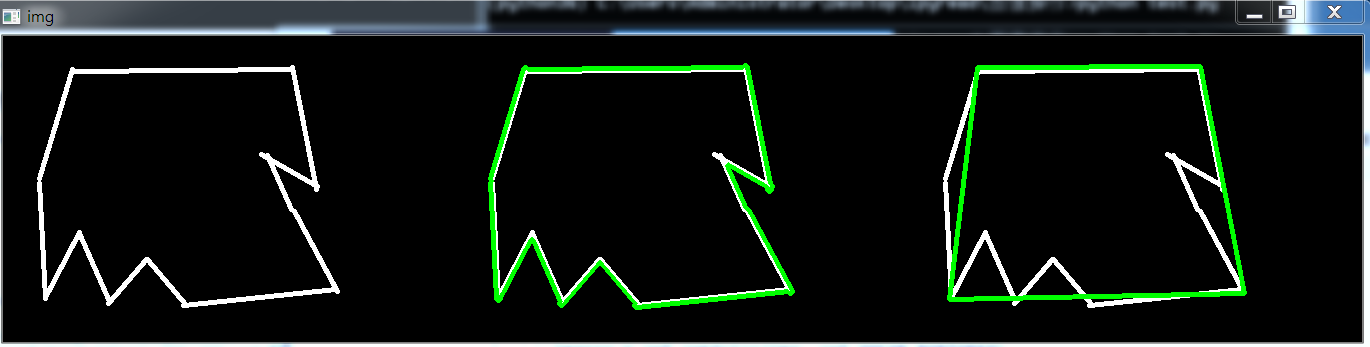
对于左边这张图,我们可以近似为中间和右边的这张图,具体如何近似呢?我们先不说,下面接着学。 下面看看cv2.approxPolyDP()函数的源码: def approxPolyDP(curve, epsilon, closed, approxCurve=None): # real signature unknown; restored from __doc__ """ approxPolyDP(curve, epsilon, closed[, approxCurve]) -> approxCurve . @brief Approximates a polygonal curve(s) with the specified precision. . . The function cv::approxPolyDP approximates a curve or a polygon with another curve/polygon with less . vertices so that the distance between them is less or equal to the specified precision. It uses the . Douglas-Peucker algorithm . . @param curve Input vector of a 2D point stored in std::vector or Mat . @param approxCurve Result of the approximation. The type should match the type of the input curve. . @param epsilon Parameter specifying the approximation accuracy. This is the maximum distance . between the original curve and its approximation. . @param closed If true, the approximated curve is closed (its first and last vertices are . connected). Otherwise, it is not closed. """ pass其参数含义: curve:表示输入的点集 epslion:指定的精度,也即原始曲线与近似曲线之间的最大距离,不过这个值我们一般按照周长的大小进行比较 close:若为True,则说明近似曲线为闭合的;反之,若为False,则断开该函数采用的是道格拉斯—普克算法(Douglas-Peucker)来实现。该算法也以Douglas-Peucker 算法和迭代终点拟合算法为名。是将曲线近似表示为一系列点,并减少点的数量的一种算法。该算法的原始类型分别由乌尔斯-拉默(Urs Ramer)于 1972年以及大卫-道格拉斯(David Douglas)和托马斯普克(Thomas Peucker)于 1973年提出,并在之后的数十年中由其他学者完善。 经典的Douglas-Peucker 算法描述如下: 1,在曲线首位两点A, B之间连接一条直线AB,该直线为曲线的弦 2,得到曲线上离该直线段距离最大的点C,计算其与AB之间的距离d 3,比较该距离与预先给定的阈值 threshold 的大小,如果小于 threshold,则该直线段作为曲线的近似,该段曲线处理完毕 4,如果距离大于阈值,则用C将曲线分为两段AC和BC,并分别对两段取新进行1~3处理 5,当所有曲线都处理完毕后,依次连接各个分割点形成的折线,即可以作为曲线的近似示意图如下:
示例如下: #_*_coding:utf-8_*_ import cv2 import numpy as np img_path = 'contour2.png' img = cv2.imread(img_path) img1 = img.copy() img2 = img.copy() imgray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) _, thresh = cv2.threshold(imgray, 127, 255, cv2.THRESH_BINARY) contours, hierarchy= cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE) cnt = contours[0] # 绘制独立轮廓,如第四个轮廓 img1 = cv2.drawContours(img1, [cnt], -1, (0, 255, 0), 3) epsilon = 0.1*cv2.arcLength(cnt, True) approx = cv2.approxPolyDP(cnt, epsilon, True) img2 = cv2.drawContours(img2, [approx], -1, (0, 255, 0), 3) res = np.hstack((img, img1, img2)) cv2.imshow('img', res) cv2.waitKey(0) cv2.destroyAllWindows()效果如下:
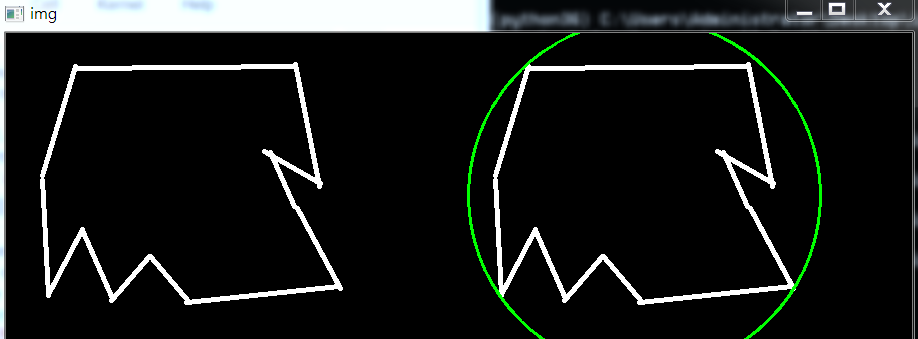
2.7 cv2.minEnclosingCircle() 在opencv中也可以实现轮廓的外接圆,它是函数cv2.minEnclosingCircle()。 下面我们看一下cv2.minEnclosingCircle()的源码: def minEnclosingCircle(points): # real signature unknown; restored from __doc__ """ minEnclosingCircle(points) -> center, radius . @brief Finds a circle of the minimum area enclosing a 2D point set. . . The function finds the minimal enclosing circle of a 2D point set using an iterative algorithm. . . @param points Input vector of 2D points, stored in std::vector\ or Mat . @param center Output center of the circle. . @param radius Output radius of the circle. """ pass参数意思也很明了,这里不再赘述。 实践代码如下: #_*_coding:utf-8_*_ import cv2 import numpy as np img_path = 'contour2.png' img = cv2.imread(img_path) img1 = img.copy() imgray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) _, thresh = cv2.threshold(imgray, 127, 255, cv2.THRESH_BINARY) contours, hierarchy= cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE) cnt = contours[0] # 求轮廓的外接圆 (x, y), radius = cv2.minEnclosingCircle(cnt) center = (int(x), int(y)) radius = int(radius) img1 = cv2.circle(img1, center, radius, (0, 255, 0), 2) res = np.hstack((img, img1)) cv2.imshow('img', res) cv2.waitKey(0) cv2.destroyAllWindows()效果如下:
2.8 cv2.fillConvexPoly()与cv2.fillPoly()填充多边形 opencv中没有旋转矩形,也没有填充矩阵,但是它可以使用填充多边形函数 fillPoly()来填充。上面两个函数的区别就在于 fillConvexPoly() 画了一个凸多边形,这个函数要快得多,不过需要指定凸多边形的坐标。而fillPoly()则不仅可以填充凸多边形,任何单调多边形都可以填充。 cv2.fillConvexPoly()函数可以用来填充凸多边形,只需要提供凸多边形的顶点即可。 下面看看cv2.fillConvexPoly()函数的源码: def fillConvexPoly(img, points, color, lineType=None, shift=None): # real signature unknown; restored from __doc__ """ fillConvexPoly(img, points, color[, lineType[, shift]]) -> img . @brief Fills a convex polygon. . . The function cv::fillConvexPoly draws a filled convex polygon. This function is much faster than the . function #fillPoly . It can fill not only convex polygons but any monotonic polygon without . self-intersections, that is, a polygon whose contour intersects every horizontal line (scan line) . twice at the most (though, its top-most and/or the bottom edge could be horizontal). . . @param img Image. . @param points Polygon vertices. . @param color Polygon color. . @param lineType Type of the polygon boundaries. See #LineTypes . @param shift Number of fractional bits in the vertex coordinates. """ pass示例如下: #_*_coding:utf-8_*_ import cv2 import numpy as np img = np.zeros((500, 500, 3), np.uint8) triangle = np.array([[50, 50], [50, 400], [400, 450]]) cv2.fillConvexPoly(img, triangle, (0, 255, 0)) cv2.imshow('image', img) cv2.waitKey(0) cv2.destroyAllWindows()我们使用绿色填充,效果如下:
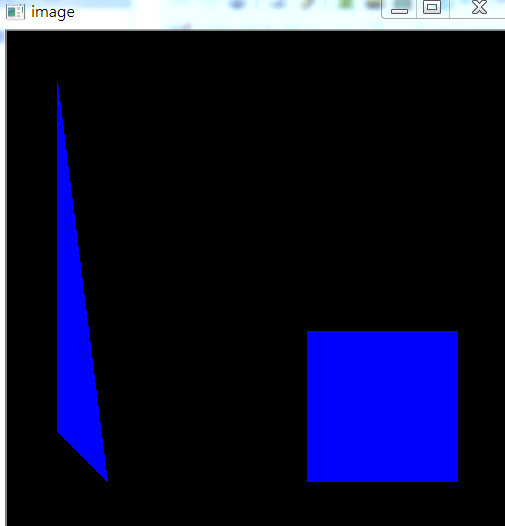
cv2.fillPoly()函数可以用来填充任意形状的图型.可以用来绘制多边形,工作中也经常使用非常多个边来近似的画一条曲线.cv2.fillPoly()函数可以一次填充多个图型。 下面看看cv2.fillPoly()函数的源码: def fillPoly(img, pts, color, lineType=None, shift=None, offset=None): # real signature unknown; restored from __doc__ """ fillPoly(img, pts, color[, lineType[, shift[, offset]]]) -> img . @brief Fills the area bounded by one or more polygons. . . The function cv::fillPoly fills an area bounded by several polygonal contours. The function can fill . complex areas, for example, areas with holes, contours with self-intersections (some of their . parts), and so forth. . . @param img Image. . @param pts Array of polygons where each polygon is represented as an array of points. . @param color Polygon color. . @param lineType Type of the polygon boundaries. See #LineTypes . @param shift Number of fractional bits in the vertex coordinates. . @param offset Optional offset of all points of the contours. """ pass效果如下: #_*_coding:utf-8_*_ import cv2 import numpy as np img = np.zeros((500, 500, 3), np.uint8) area1 = np.array([[50, 50], [50, 400], [100, 450]]) area2 = np.array([[300, 300],[450, 300], [450, 450], [300, 450]]) cv2.fillPoly(img, [area1, area2], (255, 0, 0)) cv2.imshow('image', img) cv2.waitKey(0) cv2.destroyAllWindows()效果如下:
下面举一个实际的例子来巩固一下学习的知识点。 问题是这样的,假设我相对这张图的左边面积做处理,我希望将其填充为白色(任何想要的颜色)。
也就是黑色圈外的颜色填充为白色,希望能完全利用上面学到的函数。 下面依次分析,首先对图像进行K-Means聚类,效果如下:
然后检测轮廓,这里尽量将所有的轮廓检测出来,如下:
然后对需要的轮廓进行填充,结果如下:
上图为最终的效果,代码如下: import cv2 import numpy as np import matplotlib.pyplot as plt def show_image(img): cv2.imshow('image', img) cv2.waitKey(0) cv2.destroyAllWindows() def image_processing(filename): img = cv2.imread(filename) img = cv2.resize(img, dsize=(100, 100)) data = img.reshape((-1, 3)) data = np.float32(data) # 定义中心(tyep, max_iter, epsilon) criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 10, 1.0) # 设置标签 flags = cv2.KMEANS_RANDOM_CENTERS # K-means 聚类,聚集成2类 compactness, labels2, centers2 = cv2.kmeans(data, 2, None, criteria, 10, flags) # 2 类 图像转换回 uint8 二维类型 centers2 = np.uint8(centers2) res2 = centers2[labels2.flatten()] dst2 = res2.reshape(img.shape) gray = cv2.cvtColor(dst2, cv2.COLOR_BGR2GRAY) _, thresh = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY) contours, hierarchy = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE) # 第一个参数是指明在哪副图像上绘制轮廓,第二个参数是轮廓本身,在Python中是list # 第三个参数指定绘制轮廓list中那条轮廓,如果是-1,则绘制其中的所有轮廓。。 # dst3 = cv2.drawContours(img, contours, -1, (0, 255, 0), 3) # show_image(dst3) for ind, contour in enumerate(contours): print('总共有几个轮廓:%s' % len(contours)) # 其中x,y,w,h分布表示外接矩阵的x轴和y轴的坐标,以及矩阵的宽和高,contour表示输入的轮廓值 x, y, w, h = cv2.boundingRect(contour) print(x, y, w, h) if w > 80 or h > 80: print(contours[ind]) print(type(contours[ind]), contours[ind].shape) # cv2.fillConvexPoly()函数可以用来填充凸多边形,只需要提供凸多边形的顶点即可。 cv2.fillConvexPoly(img, contours[ind], (255, 255, 255)) show_image(img) # # 用来正常显示中文标签 # plt.rcParams['font.sans-serif'] = ['SimHei'] # # # 显示图形 # titles = [u'原图', u'聚类图像 K=2'] # images = [img, dst2] # for i in range(len(images)): # plt.subplot(1, 2, i + 1), plt.imshow(images[i], 'gray') # plt.title(titles[i]) # plt.xticks([]), plt.yticks([]) # plt.show() if __name__ == '__main__': filename1 = 'test.png' image_processing(filename)
openCV Contours详解:https://www.pianshen.com/article/5989350739/ 参考文献:https://blog.csdn.net/hjxu2016/article/details/77833336 https://blog.csdn.net/sunny2038/article/details/12889059#(写的好) https://www.cnblogs.com/Ph-one/p/12082692.html 博客园函数:https://www.cnblogs.com/Undo-self-blog/p/8438808.html#top https://blog.csdn.net/on2way/article/details/46793911 |









【本文地址】
今日新闻 |
推荐新闻 |