详解Unity中的车轮碰撞器Wheel Collider |
您所在的位置:网站首页 › 车祸模拟器为什么车不动 › 详解Unity中的车轮碰撞器Wheel Collider |
详解Unity中的车轮碰撞器Wheel Collider
|
前言
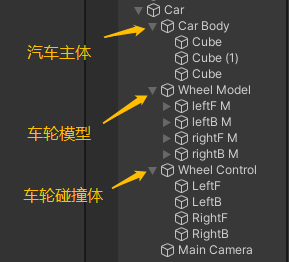
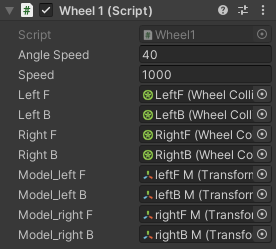
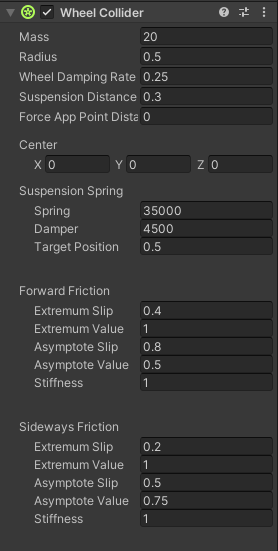
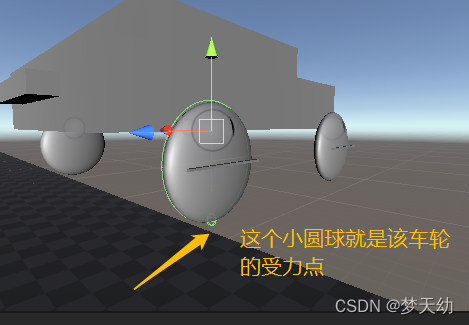
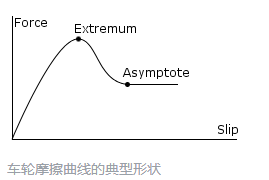
碰撞体组件定义了物体的物理性状,Unity中有一系列基本碰撞体,我们可以使用它们组合成任意形状,但除了基本碰撞体之外,Untiy还提供了诸如车轮(Wheel)、网格(Mesh)、地形(Terrain)等碰撞器,就比如Wheel Collider,该碰撞器用以实现车辆模拟,它可以模型车辆的前进后退,刹车,转向,打滑等。今天就简要介绍一下该组件的使用。 目录 前言一、先做一辆小汽车1.如何实现?实现效果展示2.实现步骤3.注意事项4.代码实现 二、Wheel Collider组件参数介绍1.Mass质量 & Radius 半径2.Wheel Damping Rate3.Suspension Distance4.Force App Point Distance5.Suspension Spring6.Forward Friction & Sideways Friction 三、Wheel Collider API1.motorTorque2.steerAngle3.breakTorque4.rpm 五、总结和参考资料1.总结2.参考资料前排提醒:本文仅代表个人观点,以供交流学习,若有不同意见请评论留言,笔者一定好好学习,天天向上。 阅读此文章时,若有不理解的地方,推荐观看本文列出的参考资料来对照阅读。 阅读本篇前,请先了解“刚体和碰撞体”相关知识。 Unity版本[2019.4.10f1] 梦小天幼 & 禁止转载 视频讲解: 详解Unity的车轮碰撞器_BiLiBiLi Demo开源链接:Demo编号:D017 Drenayo/UnityGameSamples 一、先做一辆小汽车车轮碰撞器顾名思义,肯定是用于模拟车轮的,你可以用它来模拟自行车、三轮车、小汽车、大货车,统统都可以!该碰撞体内置了碰撞检测、车轮物理组件和基于打滑的轮胎摩擦模型。是专为车轮而生的碰撞器! 1.如何实现?实现效果展示So,先从使用车轮碰撞器做一辆车车开始,首先想想若使用传统方法做汽车,车轮应当如何实现? 用transform位移,然后每秒转几圈、拐弯时车轮和车体整体都要偏移,很难做出车轮拐弯车体不动的效果,这时候使用刚体来驱动或许效果会好一点,但是它的模拟力不能确定,还有悬挂,刹车,打滑等又要如何实现?所以如果我们用自己的想法来实现一辆小汽车,可能困难重重,但!Unity为我们提供了车轮碰撞器!它可以解决上述所有问题! 老规矩,先看实现效果,再细说实现流程。 通过这个动图,我们可以清楚的看到,小汽车可以前进后退,转弯,打滑。下面来说说详细的实现步骤 2.实现步骤首先我们要认识到空物体的重要性,举个例子,那就相当于电脑中的文件夹,它没有什么实际的功能,但是它可以帮我们将一大堆资源合理摆放,我们要做一辆汽车,为了便于脚本控制和方便我们管理,所以首先我们要建立一个汽车的空物体,这是一个"总文件夹",场景中和汽车相关的都放在这里。其次我们建立三个"子文件夹(三个空物体)",分别存放汽车主体模型,汽车轮胎,汽车轮胎的车轮碰撞体。 你可能会疑惑?什么汽车轮胎和汽车轮胎的WheelCollider要分类存放,碰撞体组件不是依附在汽车轮胎模型上的吗?答案如下: 不必通过转动或滚动 WheelCollider 对象来控制汽车;附加了 WheelCollider 的对象应始终相对于汽车本身固定。但是,可能会需要车轮会旋转移动之类的动画操作。最好的方法是为 WheelCollider(依附于空物体)和车轮模型设置单独的对象(引用自Unity官方文档,经过简要修改) 所以我们建立好三个空物体,存放汽车主体模型、车轮模型、碰撞体,车体模型用最基本的正方体堆一个就行,车轮模型使用圆球,压扁它当作车轮(为什么不用圆柱体,因为它的轴向不对,大家可以拿一个圆柱体试试看),碰撞体需要单独建四个空物体,然后为它们加上WheelCollider。So,结构图如下。 写代码前,有几点需要注意的事项。(很重要!!!) 首先要在最上层的空物体上加上刚体组件,也就是"Car",更改质量参数Mass,大概1500(普通小汽车的重量),其他不用改。这样做的目的是给车加上重量,以及让车具有物理特性。且!如果不给WheelCollider的父级或父父级加上刚体组件的话,WheelCollider是不会显示在Scene窗口中的。 其次,删除汽车车轮模型上的自带的碰撞体,因为WheelCollider本身就具有碰撞,所以车轮模型的作用就只是动画而已,其物理特性,完全由WheelCollider控制的。 最后,WheelCollider的位置和车轮模型的位置要一样,大致一样就行。因为它们分开是为了方便控制,但本身它们就应该在同一个位置,一个负责外形,一个负责物理实现。 最后的最后,若WheelCollider的半径太小,调整其Radius参数即可 4.代码实现该脚本挂载到任何地方都行,建议挂载到Car总空物体上,截图和代码如下: 现在你已经完成了一辆小汽车了,是不是成就感满满,然后呢我们就来详细说说该组件都有什么参数,看起来一大堆很唬人是吧,咱就挑些重点的说说,其他的先不涉及。 顾名思义,质量值一般就设置为单个轮胎重量就行,和现实世界不要差太多,半径就是半径,不多解释,自己调一调试一试。 2.Wheel Damping Rate应用于车轮的阻尼值。阻尼是作用于运动物体的阻力,值越大,车越难打滑。 3.Suspension Distance车轮悬挂的最大延伸距离,悬挂始终向下延伸穿过自身Y轴,就是悬挂高度,始终是垂直向下的。这个要看你做什么车,比如汽车,底盘低,默认值我觉得就OK,但是那种越野车就需要把该值改高一点了。设置为0,那么车本身的转向避震就会很生硬,像个方块一样。 4.Force App Point Distance车轮的受力点,默认位于静止车轮的底部(如下图),一般无需改动。 设置悬挂系统相关参数: 1.Spring : 值越大,悬架抵达目标位置就越快,就是悬架弹簧弹一个来回的时间的快慢 2.Damper : 抑制悬架速度,这个参数和上一个是相辅相成的(应该是相爱相杀),若想要到达自己需要的悬架数据,需不断调整。 3.Target Position : 这个值就是在静止状态下的悬架展开程度(根据悬架距离Supension Distance计算),也就是说悬架静止状态下的展开和压缩并不是有车体重量控制的,而是这个参数来控制的。默认0.5,符合正常的汽车悬架。值为1完全展开,为0完全压缩。 6.Forward Friction & Sideways Friction根据名字应该就知道,这两组参数用于设置车轮的纵向(前进后退)和横向(转向)的摩擦特性。 该如何理解呢? Extremum Slip ,Extremum Value Asymptote Slip,Asymptote Value 上述四个值是坐标系的两个坐标,它们确定了一个滑动距离与摩擦力的关系曲线 Stiffnes :该值则整体调节摩擦曲线的倍数 若是上面不理解直接修改这个就可以,新手不建议动上面四个变量,因为在不懂的情况下修改会产生很奇怪的效果。 下图演示了仅修改车轮纵向的Stiffnes的值: 通过在运行时改变该值用以模拟各种地面材质(注意,物理材质在车轮碰撞器上是无效的,所以需要通过修改该值来模拟各种地面) 三、Wheel Collider API学习WheelCollider的API可以让我们更好的对车轮进行控制,比如上面的做一个小汽车的案例,就使用了该碰撞器的两个变量,motorTorque和steerAngle。下面简要讲述一下这些API吧。 变量描述单位备注motorTorque轮轴上的电机扭矩牛米steerAngle转向角度度breakTorque制动扭矩牛米rpm当前轮轴转速每分钟/转只读forwardFriction车轮前进方向上的摩擦sidewaysFriction车轮侧向上的摩擦wheelDampingRate车轮的阻尼率,必须大于零GetWorldPose(V3 pos, Quat quat)获取车轮世界空间姿态获取WheelCollider参数同步到模型轮胎上,使其转动参考本篇1-4代码实现部分,第46行挑几个重点说说: 1.motorTorque此参数用于调整车轮的转动,也就是传说中的前进与后退。比如你想要做一辆后驱车,就只应该设置后两个车轮受控。单位是牛米(N.m),是力的单位和距离的单位的乘积。 这里套用现实世界的知识,扭矩决定了发动机输出的力度,曲轴转速的变化、汽车的爬坡能力、起步速度及加速性。理论上,扭矩越大,起步速度就越快。(仅供理解,Unity中和现实世界还是不一样的) 该值设置过低会出现颠簸的情况。 对了!通过调整左右车轮的扭矩大小,应当可以模拟坦克转向!回头可以试试。 2.steerAngle该值用以转向。以度为单位。一般来讲要模拟真实车辆,肯定不能直接设置该值多少度,这样太突兀了。比如设置当按下左方向键后2秒,角度才完全打完,这样模拟向左打方向盘。现实世界中车轮转向角度为30-40,各个车型略有不同。 下面简要模拟了一下: 制动扭矩,单位还是N.m,必须为正数,用于刹车。看下面的代码就理解了。 至于这个数量设置多少合适,个人认为比车辆扭矩大一点就可以了,自己调整着来吧,反正也没个定值。 public float breakMove = 1000f; bool isBraking = Input.GetKey(KeyCode.Space); leftB.brakeTorque = isBraking ? breakMove : 0f; rightB.brakeTorque = isBraking ? breakMove : 0f; 4.rpm该车轮每分钟的转速,该参数可以拿来计算汽车的速度。 Rpm = wheel.rpm * (wheel.radius * 2 * Mathf.PI) * 60 / 1000); 五、总结和参考资料 1.总结我们通过Unity提供的Wheel Collider用以模拟各种车辆,它们的前进后退,制动,转向,悬挂等功能。 通过motorTorque控制车辆扭矩通过steerAngle控制车辆转向通过breakTorque控制车辆制动注意点: 碰撞器最上层空物体一定要加刚体组件汽车轮胎模型自动的碰撞体记得删除汽车轮胎模型和车轮碰撞体分别存放车轮碰撞体参数:可设置该车轮的质量、半径、阻尼、悬挂、摩擦等特性。 2.参考资料[1].天孤寒羽.unity小案例教程第二期(汽车)BiliBili [2].Unity官方.Unity官方文档 车轮碰撞体 [3].Unity官方.Unity官方文档 WheelCollider API [4].CoderZ1010.Unity 【Wheel Collider】实现游戏中的车具控制(CSDN) [5].泰课在线.unity wheelcollider轮子转动 |
 (该图截取自Unity官方文档)
(该图截取自Unity官方文档)
【本文地址】
今日新闻 |
推荐新闻 |