一种基于改进河马算法的数控高速钻铣床控制方法与流程 |
您所在的位置:网站首页 › 超高速铣床 › 一种基于改进河马算法的数控高速钻铣床控制方法与流程 |
一种基于改进河马算法的数控高速钻铣床控制方法与流程
 本发明属于pid控制优化领域,尤其涉及一种基于改进河马算法的数控高速钻铣床控制方法。 背景技术: 1、数控高速钻铣床是一种高效的机床设备,主要用于工件的高效钻孔加工。它可以在单质材料零件及复合材料上实现钻通孔、盲孔等数控操作。其加工过程通过数字控制,配合伺服主轴电机实现无级变速,并由全数字数控控制系统和光电寻边器双重保证精准定位。因此,全数字控制系统性能的好坏是决定数控高速钻铣床精度和安全性的关键。而在工业应用中,数控高速钻铣床一般采用pid控制方法。 2、pid控制结合了比例、积分和微分三种环节于一体,对输入偏差进行比例、积分、微分的运算,然后运用叠加的结果去控制执行机构。由于其稳定性强、结构简单,在工业控制中得到了广泛的应用,且一般采取闭环控制方式;虽然应用广泛,但pid控制也存在一些明显的缺点;首先、传统的pid控制直接取设定值和输出之间的误差作为控制依据,可能导致系统超调或振荡,对数控高速钻铣床速度控制系统的稳定性会产生一定的干扰,其次、传统的pid控制采用线性组合方式形成控制量,不适用于所有系统,特别是在处理非线性、时变等复杂过程时效果可能不佳,会影响到数控高速钻铣床速度控制系统的精确度,最后、pid控制器的参数调整需要工作人员的经验和技巧,参数选择不当会耗费大量的时间。 3、河马优化(ho)算法是一种群智能算法,从河马观察到的固有行为中汲取灵感而构思的,通过模拟河马在河流或池塘中的位置更新,对捕食者的防御以及逃避捕食者策略实现河马位置的更新。该算法通过自适应地调整搜索空间的分辨率和搜索速度,以快速而准确地找到最优解,具有收敛速度快、求解精度高等特点。但与其他群智能算法一样,在算法后期的逃避捕食者阶段(开发阶段)容易陷入局部最优解,无法跳出,从而在实际pid控制中无法寻找到最优参数。 技术实现思路 1、本发明的目的在于:通过改进河马算法,利用改进的河马算法(iho)优化数控高速钻铣床速度控制系统的pid控制器的kp、ki、kd参数,减少pid控制器的超调量并提高pid控制的响应速度,从而解决传统pid控制在数控高速钻铣床速度控制系统下稳定性不足、控制精度不高的问题。 2、为了实现上述目的,本发明采用了如下技术方案: 3、一种基于改进河马算法的pid最优鲁棒控制方法方法,具体步骤如下: 4、步骤一、使用simulink软件建立数控高速钻铣床速度控制系统的仿真模型。 5、步骤二、使用matlab软件建立改进河马算法数学模型,并编写测试函数,验证改进河马算法优化pid控制器的性能;所述改进河马算法包括:s21、引入混沌映射改进算法种群初始化位置公式,s22、引入自适应权重改进捕食者位置更新公式,s23、引入三角形游走策略改进算法河马种群逃避捕食者阶段的位置更新公式,具体如下: 6、step1、引入混沌映射改进算法种群初始化位置公式,引入的混沌映射公式为tent映射,改进后的初始化公式为: 7、(1); 8、(2); 9、式(1)中,i = 1,2,…,n,n为河马种群数量,为第一只河马初始化的位置,为在河马位置的下界值,为在河马位置的上界值,为第i只河马的位置,为第i+1只河马的位置,r为取值在[0,1]之间的随机数,a取值为(0,0.5)之间的随机数,先通过(1)式采用伪随机序列初始化第一只河马的位置,再通过(2)式采用混沌映射的方式初始化剩余的河马的位置; 10、step2、然后,在河马算法处于河马防御捕食者阶段,引入自适应权重w改进捕食者位置更新公式,改进后的捕食者位置更新公式如下: 11、; 12、式中,predator(t)为捕食者的位置,lb和ub的意义同上,w为自适应权重,r的意义同上; 13、w的公式如下: 14、; 15、式中,max_iter为最大进化代数,t为本轮进化代数; 16、step3、最后,引入三角形游走策略改进算法河马种群逃避捕食者阶段的位置更新公式,公式如下: 17、(3); 18、式中,为改进后的第i只河马位置,为经过原先的河马位置更新公式计算的河马位置,为随机选取的一只河马的位置,i和r的意义同上。 19、步骤三、利用改进后的河马算法优化数控高速钻铣床速度pid控制器,得到数控高速钻铣床速度pid控制器的最佳kp、ki、kd参数。 20、步骤四、将得到最佳参数kp、ki、kd输入simulink软件建立的数控高速钻铣床速度控制系统的仿真模型中,调试得到数控高速钻铣床速度控制系统pid控制的最佳效果。 21、进一步地,所述步骤一中,数控高速钻铣床速度控制系统包括信号输入单元、pid控制器单元、改进河马算法单元、电调控制器单元、交流异步电机单元、位置和速度信息采集单元;目标转速从信号输入单元输入,与位置和速度信息采集单元采集到的实际转速进行做差求得偏差量e(t),将得到的e(t)输入pid控制器单元,经过改进河马算法优化后的pid控制器对e(t)进行调节,输出控制量u(t)到电调控制器中,电调控制器生成脉冲信号控制交流异步电机的运转,进而实现整个数控高速钻铣床的速度控制。 22、进一步地,所述步骤一中,将数控高速钻铣床电机速度控制问题转换成待优化数学模型,数学模型即为改进河马算法的目标函数。 23、进一步地,所述步骤二中,引入混沌映射改进算法种群初始化位置公式,在种群初始化阶段,可以使初始化的粒子或个体变得更加随机和多样;这样有助于增加种群的多样性,提高算法的全局搜索能力,减少陷入局部最优解的可能性,同时,混沌序列的遍历性特性也有助于提高算法的收敛速度,使得算法能够更快地达到最优解。 24、进一步地,所述步骤二中,在河马算法处于河马防御捕食者阶段,引入自适应权重w改进捕食者位置更新公式,可以提高算法的寻优精度,避免算法在进化后期陷入局部最优解的情况。 25、进一步地,所述步骤二中,引入三角形游走策略改进河马算法河马群逃避捕食者阶段的位置更新公式,有利于加强河马算法的局部搜索能力。 26、进一步地,所述步骤三中,利用改进后的河马算法优化数控高速钻铣床速度控制系统的pid控制器,得到最优kp、ki、kd参数,具体步骤为: 27、s1、模拟数控高速钻铣床速度控制系统的工况,使用simulink仿真软件设计传递函数,传递函数模型采用二阶非线性函数来模拟数控高速钻铣床电机转动速度的工作过程; 28、s2、给定数控高速钻铣床速度控制系统的输入信号,输入信号即数控高速钻铣床电机的目标转速; 29、s3、初始化改进的河马算法(iho)的种群规模n、问题维度dim、算法搜索空间上界 ub、算法搜索空间下界l b以及最大迭代次数 max_iter; 30、s4、将数控高速钻铣床速度控制系统的pid控制器kp、ki、kd参数编码为改进河马算法的位置解的三个维度; 31、s5、选择itae作为改进的河马算法(iho)的目标函数,目标函数公式为: 32、; 33、式中, j为改进的河马算法所求得的适应度值,e(t)为数控高速钻铣床速度控制系统的电机的目标转速与位置和速度信息采集模块采集到的电机实时转速的偏差, t为当前迭代次数,为计算的迭代次数; 34、s6、通过混沌映射初始化河马种群的初始位置、计算各河马个体所在位置的适应度,选择适应度最小的河马位置作为种群最佳位置,并记录该位置的适应度值为best_pd; 35、s7、模拟河马的社会行为,建立改进河马算法的位置更新策略数学模型,利用所述数学模型更新河马位置,即更新数控高速钻铣床速度pid控制器的kp、ki、kd参数; 36、s8、采用贪婪选择的方式决定是否更新河马的位置,记录在本轮进化中最佳河马位置和最佳河马适应度,进化代数t加1次; 37、s9、循环执行s6~s8,判断当前迭代次数是否达到最大迭代次数,若达到,则退出循环,输出全局最优解,并传递给数控高速钻铣床速度控制系统的pid控制器的kp、ki、kd三个参数。 38、更进一步地,所述s1中,为更好地模拟数控高速钻铣床速度控制系统的工况,使用simulink仿真软件设计二阶非线性函数来模拟数控高速钻铣床速度电机的工作过程从而使得数控高速钻铣床速度增强工作时的精度,同时减少系统的稳态误差和动态误差,提高控制系统的稳定性和安全性,传递函数的公式如下: 39、; 40、式中,s为复频率变量。 41、更进一步地,所述s5中,e(t)为数控高速钻铣床速度控制系统给定目标转速和电机实际转速的偏差,通过e(t)计算数控高速钻铣床速度控制系统的pid控制器的输出控制量u(t)的公式如下: 42、; 43、式中,u(t)为数控高速钻铣床速度控制系统的pid控制器的输出控制量,kp、ki、kd的意义同上。 44、更进一步地,所述s7,模拟河马的社会行为,建立改进河马算法的位置更新策略数学模型的具体步骤为: 45、s71、模拟河马种群中一半的河马进入河流的行为,按照公式(4)和公式(5)建立河马种群处于河流阶段的位置更新数学模型; 46、(4); 47、(5); 48、式(4)中,为第i个雄性河马的位置更新公式,为上一轮进化中第i个河马所处的位置,为取值在[0,1]之间的随机数,为上一轮进化中的最佳河马所在位置,和为取值在[1,2]之间的随机向量,式(5)中,为第i个雌性河马的位置更新公式,为取值在[0,1]之间的随机向量,为当前选择的各个随机数的平均值; 49、s72、通过目标函数计算更新后的各河马位置的适应度值,通过贪婪选择的方式,按照公式(6)和公式(7)选择适应度小的位置为河马在本轮进化中的最新位置; 50、(6); 51、(7); 52、式中,为第i个河马在本轮进化中的最新位置,、、的意义同步骤s71,和为第i个雄性河马和第i个雌性河马位置更新后的适应度,为第i个河马在上一轮进化中所处位置的适应度; 53、s73、模拟河马在自己领地内巡视,让捕食者意识到处于河马领地之内的行为,按照公式(8)建立河马种群防御捕食者阶段的位置更新数学模型; 54、(8); 55、式中,为第i个河马更新后的位置,rl为具有莱茵飞行的随机向量,为改进后的捕食者位置,b为取值[2,4]之间的随机数,c为取值[1,1.5]之间的随机数,d为取值[2,3]之间的随机数,g为取值[0,1]之间的随机向量,为取值在[0,1]之间的随机向量; 56、s74、模拟进入河马逃避捕食者阶段,当河马无法抵御捕食者时,会选择离开该区域进入最近的河流或池塘区域,以避免捕食者伤害的行为,按照公式(9)建立河马逃避捕食者阶段的位置更新数学模型; 57、(9); 58、式中,和的意义同上,为取值在[0,1]之间的随机向量,lb为在河马位置的下界值,ub为在河马位置的下界值,为取值在[0,1]、[1,2]和符合正态分布这三种情况的随机一种随机数; 59、s75、按照公式(3)引入三角形游走策略改进河马种群逃避捕食者阶段的位置更新公式,更新河马个体位置。 60、综上所述,由于采用了上述技术方案,本发明的有益效果是: 61、本发明中提出一种基于改进河马算法的数控高速钻铣床速度控制方法,引入混沌映射初始化种群、引入自适应权重改进捕食者位置更新公式和引入三角形游走策略改进河马算法,使改进后的河马算法在算法的初期阶段,通过混沌映射初始化种群,可以在种群初始化阶段,使初始化的粒子或个体变得更加随机和多样,这样有助于增加种群的多样性,提高算法的全局搜索能力;在算法处于防御捕食者阶段引入自适应权重,可以提高算法的寻优精度,避免算法在进化后期陷入局部最优解的情况;在算法处于躲避捕食者阶段引入三角形游走策略,可以加强算法的局部搜索能力,将改进后的河马算法应用到数控高速钻铣床速度控制系统的pid控制器当中,提高了pid控制器参数的精度和稳定性;在面对非线性的,时变的数控高速钻铣床速度控制系统时,有效解决了数控高速钻铣床速度反应速度慢、电机运行不稳定和控制精度不够的问题。 |
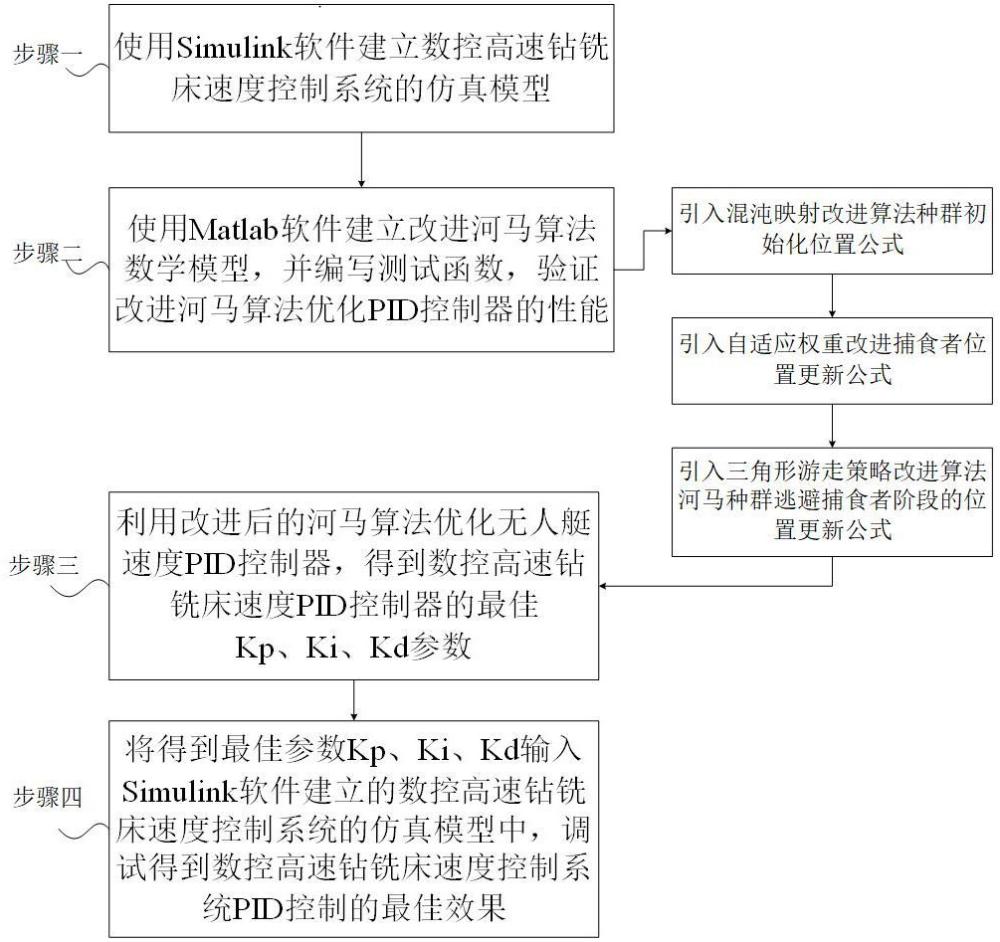
【本文地址】
今日新闻 |
推荐新闻 |