开发者实战 |
您所在的位置:网站首页 › 谷歌套件指的是什么 › 开发者实战 |
开发者实战
|
01 简介 《在英特尔开发者套件上用OpenVINO™加速YOLOv8-seg实例分割模型》介绍了在英特尔者开发套件上使用 OpenVINO™ 开发套件部署并测评 YOLOv8-Seg 的实例分割模型,本文将介绍在英特尔开发者套件上使用 OpenVINO™ 2023.0 加速 YOLOv8-Pose 姿态估计(Pose Estimation)模型。
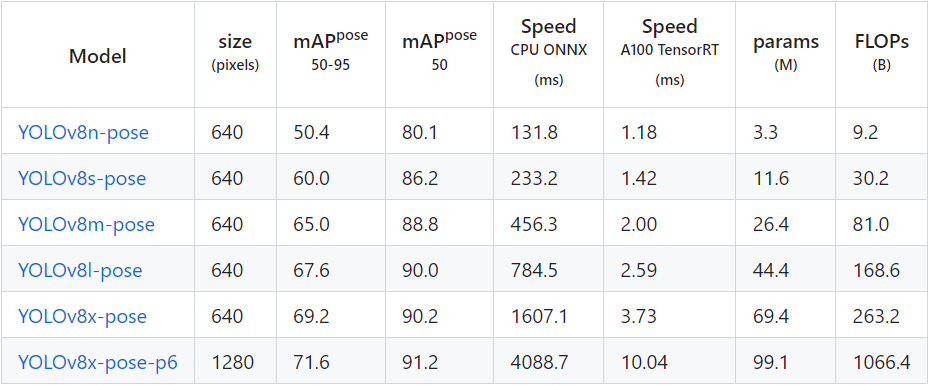
请先下载本文的范例代码仓,并搭建好 YOLOv8 的OpenVINO™ 推理程序开发环境: git clone https://gitee.com/ppovnuc/yolov8_openvino.git 02 导出 YOLOv8-Pose 姿态估计 OpenVINO™ IR 模型 YOLOv8-Pose 的姿态估计模型有5种,在 COCO Keypoints 数据集完成训练,如下表所示。 COCO Keypoints 数据集请见: http://cocodataset.org/
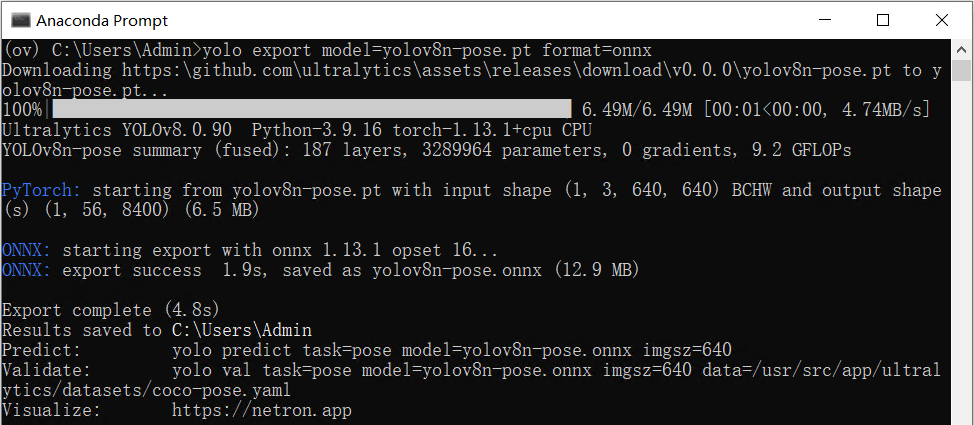
首先使用命令: yolo export model=yolov8n-pose.pt format=onnx向右滑动查看完整代码 完成 yolov8n-pose.onnx 模型导出,如下图所示:
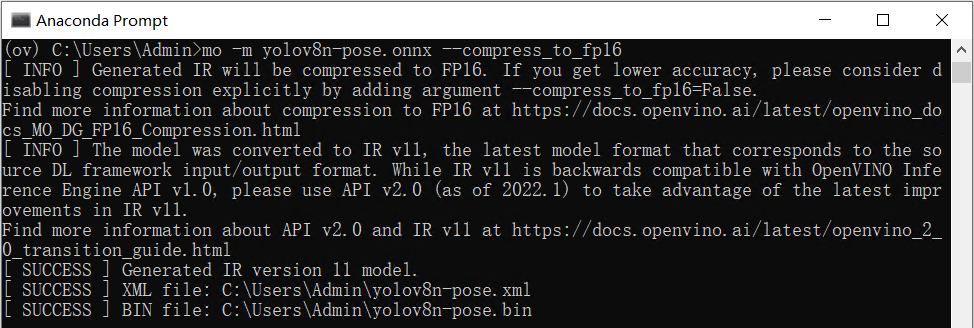
然后使用命令: mo -m yolov8n-pose.onnx --compress_to_fp16向右滑动查看完整代码 优化并导出 FP16 精度的 OpenVINO™ IR 格式模型,如下图所示:
03 用 benchmark_app 测试 yolov8 姿态估计模型的推理计算性能 benchmark_app 是 OpenVINO™️ 工具套件自带的 AI 模型推理计算性能测试工具,可以指定在不同的计算设备上,在同步或异步模式下,测试出不带前后处理的纯 AI 模型推理计算性能。 使用命令: benchmark_app -m yolov8n-pose.xml -d GPU向右滑动查看完整代码 获得 yolov8n-pose.xml 模型在英特尔开发者套件的集成显卡上的异步推理计算性能,如下图所示:
04 使用 OpenVINO™ Python API 编写 YOLOv8-Pose 姿态估计模型推理程序 用 Netron 打开 yolov8n-seg.onnx 可以看到模型的输入和输出: 输入节点名字:“images”;数据:float32[1,3,640,640] 输出节点1的名字:“output0”;数据:float32 [1,56,8400],其中“8400”是指 YOLOv8 的3个检测头在 imgsz=640 时,有640/8=80,640/16=40,640/32=20,80x80+40x40+20x20=8400个输出单元格;“56”指 “Person” 类的中心坐标 cx,cy,w,h+“Person” 类的置信分数+“Person” 类的17个关键点([17,3]) = 56。
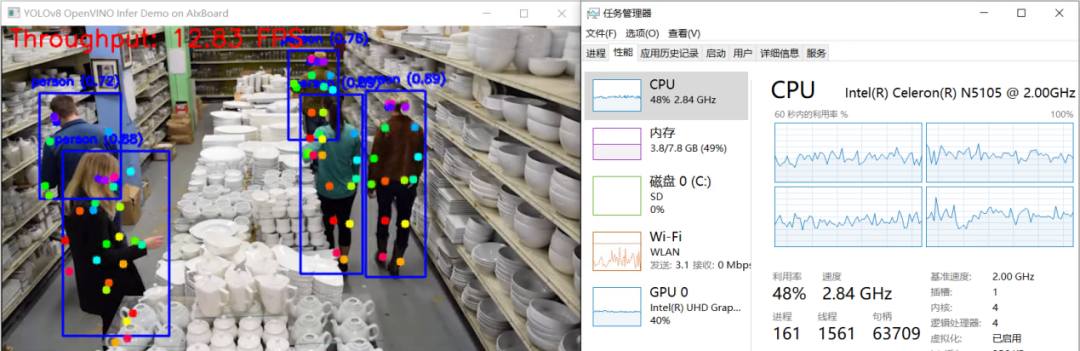
基于 OpenVINO™ Python API 的 YOLOv8 实例分割模型范例程序 yolov8_pose_ov_sync_infer_demo.py 的核心源代码,如下所示: # 实例化Core对象 core = Core() # 载入并编译模型 net = core.compile_model(f'{MODEL_NAME}.xml', device_name="GPU") # 获得模型输出节点 output_node = net.outputs[0] ir = net.create_infer_request() cap = cv2.VideoCapture("store-aisle-detection.mp4") while True: start = time.time() ret, frame = cap.read() if not ret: break [height, width, _] = frame.shape length = max((height, width)) image = np.zeros((length, length, 3), np.uint8) image[0:height, 0:width] = frame scale = length / 640 blob = cv2.dnn.blobFromImage(image, scalefactor=1 / 255, size=(640, 640), swapRB=True) # 基于OpenVINO实现推理计算 outputs = ir.infer(blob)[output_node] outputs = np.array([cv2.transpose(outputs[0])]) rows = outputs.shape[1] # Postprocess boxes = [] scores = [] preds_kpts = [] for i in range(rows): classes_scores = outputs[0][i][4] key_points = outputs[0][i][5:] if classes_scores >= 0.5: box = [ outputs[0][i][0] - (0.5 * outputs[0][i][2]), outputs[0][i][1] - (0.5 * outputs[0][i][3]), outputs[0][i][2], outputs[0][i][3]] boxes.append(box) scores.append(classes_scores) preds_kpts.append(key_points) result_boxes = cv2.dnn.NMSBoxes(boxes, scores, 0.25, 0.45, 0.5) detections = [] for i in range(len(result_boxes)): index = result_boxes[i] box = boxes[index] pred_kpts = preds_kpts[index] detection = { 'class_id': 0, 'class_name': 'person', 'confidence': scores[index], 'box': box, 'scale': scale} detections.append(detection) print(box[0] * scale, box[1] * scale, scale) draw_bounding_box(frame, 0, scores[index], round(box[0] * scale), round(box[1] * scale), round((box[0] + box[2]) * scale), round((box[1] + box[3]) * scale)) draw_key_points(frame, pred_kpts, 0.2, scale)向右滑动查看完整代码 运行结果,如下图所示:
05 结论 英特尔开发者套件借助 N5105 处理器的集成显卡(24个执行单元)和 OpenVINO™ 2023.0 ,可以在 YOLOv8-Pose 的姿态估计模型上获得相当不错的性能。通过异步处理和 AsyncInferQueue ,还能进一步提升计算设备的利用率,提高 AI 推理程序的吞吐量。 --END-- 你也许想了解(点击蓝字查看)⬇️➡️ OpenVINO™ DevCon 2023重磅回归!英特尔以创新产品激发开发者无限潜能➡️ 5周年更新 | OpenVINO™ 2023.0,让AI部署和加速更容易➡️ OpenVINO™5周年重头戏!2023.0版本持续升级AI部署和加速性能➡️ OpenVINO™2023.0实战 | 在 LabVIEW 中部署 YOLOv8 目标检测模型➡️ 开发者实战系列资源包来啦!➡️ 以AI作画,祝她节日快乐;简单三步,OpenVINO™ 助你轻松体验AIGC ➡️ 还不知道如何用OpenVINO™作画?点击了解教程。➡️ 几行代码轻松实现对于PaddleOCR的实时推理,快来get!➡️ 使用OpenVINO 在“端—边—云”快速实现高性能人工智能推理➡️ 图片提取文字很神奇?试试三步实现OCR!➡️【Notebook系列第六期】基于Pytorch预训练模型,实现语义分割任务➡️使用OpenVINO™ 预处理API进一步提升YOLOv5推理性能 扫描下方二维码立即体验 OpenVINO™ 工具套件 2023.0点击 阅读原文 立即体验OpenVINO 2023.0
文章这么精彩,你有没有“在看 |




【本文地址】
今日新闻 |
推荐新闻 |