(最优化理论与方法)第二章最优化所需基础知识 |
您所在的位置:网站首页 › 证明透视仿射对应保持二直线的平行性的方法 › (最优化理论与方法)第二章最优化所需基础知识 |
(最优化理论与方法)第二章最优化所需基础知识
|
文章目录
一:仿射变换的保凸性(1)仿射变换的保凸性(2)例子
二:透视变换的保凸性(1)透视变换(2)透视变换的保凸性
三:分式线性变换的保凸性(1)分式线性变换(2)分式线性变换的保凸性
保凸运算:简单来说,保凸运算是指原来的集合 C C C是一个凸集,然后让这个凸集 C C C经过一些变换让其仍然为凸集,也即利用凸集构造凸集。保凸运算包括以下三个方面 ①:交集是保凸的 这一点在“凸集的性质”中已有说明②:仿射变换是保凸的,包括 缩放和移位是凸的两个凸集的和是凸的两个凸集的直积是凸的线性矩阵不等式的解是凸的③:透视变换是保凸的 线段经过透视变换后是凸的凸集的反透视变换仍是凸的④:分式线性变换是保凸的 一:仿射变换的保凸性 (1)仿射变换的保凸性仿射变换的保凸性:假设 f : R n → R m f:\R^{n}\rightarrow\R^{m} f:Rn→Rm是仿射变换( x ∈ R n x\in\R^{n} x∈Rn、 f ( x ) ∈ R m f(x)\in\R^{m} f(x)∈Rm),即 f ( x ) = A x + b f(x)=Ax+b f(x)=Ax+b(也即仿射变换是线性函数和常量的组合,其中 A ∈ R m × n A\in \R^{m×n} A∈Rm×n、 b ∈ R m b\in\R^{m} b∈Rm、 A x ∈ R m × 1 Ax\in\R^{m×1} Ax∈Rm×1),则 凸集在 f f f下的像(image)是凸集: S ⊆ R n S\subseteq R^{n} S⊆Rn是凸集=> f ( S ) = { f ( x ) ∣ x ∈ S } f(S)=\{f(x)|x\in S\} f(S)={f(x)∣x∈S}是凸集凸集在 f f f下的原像是凸集: C ⊆ R m C\subseteq R^{m} C⊆Rm是凸集=> f − 1 ( C ) = { x ∣ f ( x ) ∈ C } f^{-1}(C)=\{x|f(x)\in C\} f−1(C)={x∣f(x)∈C}是凸集例题: 设 x 1 , x 2 ∈ S x_{1}, x_{2}\in S x1,x2∈S( S S S为凸集), θ ∈ [ 0 , 1 ] \theta\in [0,1] θ∈[0,1],则有凸组合 θ x 1 + ( 1 − θ ) x 2 ∈ S \theta x_{1}+(1-\theta)x_{2} \in S θx1+(1−θ)x2∈S;现证明经仿射变换 f f f下所形成的集合 f ( x ) f(x) f(x)为凸集 也即证明:对于 x 1 , x 2 x_{1}, x_{2} x1,x2,有 f ( x 1 ) , f ( x 2 ) ∈ f f(x_{1}),f(x_{2})\in f f(x1),f(x2)∈f,有 θ ∈ [ 0 , 1 ] \theta\in [0,1] θ∈[0,1],是否有 θ f ( x 1 ) + ( 1 − θ ) f ( x 2 ) ∈ f \theta f(x_{1})+(1-\theta)f(x_{2}) \in f θf(x1)+(1−θ)f(x2)∈f成立证明:由于 f ( x ) = A x + b f(x)=Ax+b f(x)=Ax+b,故上上式可转换为 θ ( A x 1 + b ) + ( 1 − θ ) ( A x 2 + b ) = A [ θ x 1 + ( 1 − θ ) x 2 ] + b ( θ ) + ( 1 − θ ) = A [ θ x 1 + ( 1 − θ ) x 2 ] + b \theta(Ax_{1}+b)+(1-\theta)(Ax_{2}+b)=A[\theta x_{1}+(1-\theta)x_{2}]+b(\theta)+(1-\theta)=A[\theta x_{1}+(1-\theta)x_{2}]+b θ(Ax1+b)+(1−θ)(Ax2+b)=A[θx1+(1−θ)x2]+b(θ)+(1−θ)=A[θx1+(1−θ)x2]+b,由于 θ x 1 + ( 1 − θ ) x 2 ∈ S \theta x_{1}+(1-\theta)x_{2}\in S θx1+(1−θ)x2∈S,故 A [ θ x 1 + ( 1 − θ ) x 2 ] + b ∈ f A[\theta x_{1}+(1-\theta)x_{2}]+b\in f A[θx1+(1−θ)x2]+b∈f仿射变换也可通过下面的例子理解
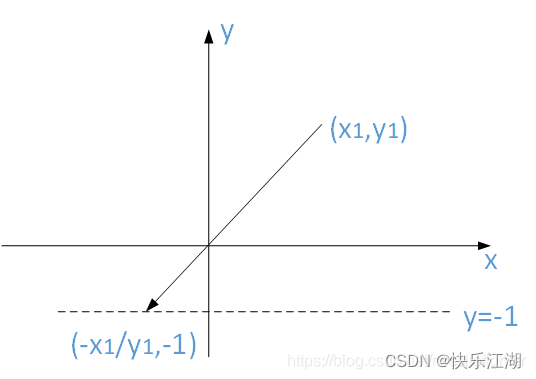
缩放和移位是保凸的:如果 S ⊆ R n S \subseteq R^{n} S⊆Rn是凸集, α ∈ R \alpha \in R α∈R, a ∈ R a \in R a∈R,那么缩放和移位后的 α S \alpha S αS和 S + a S+a S+a也是凸集 α S = { α x ∣ x ∈ S } \alpha S=\{\alpha x|x \in S\} αS={αx∣x∈S} S + a = { x + a ∣ x ∈ S } S+a=\{x +a |x \in S\} S+a={x+a∣x∈S}两个凸集的和是凸的:两个集合的和被定义为 S 1 + S 2 = { x + y ∣ x ∈ S 1 , y ∈ S 2 } S_{1}+S_{2}=\{x+y | x\in S_{1}, y\in S_{2}\} S1+S2={x+y∣x∈S1,y∈S2} 如果 S 1 S_{1} S1和 S 2 S_{2} S2是凸集,那么 S 1 + S 2 S_{1}+S_{2} S1+S2也为凸集 两个凸集的直积(笛卡尔积)是凸的:直积(笛卡尔积)被定义为 S 1 × S 2 = { ( x 1 , x 2 ) ∣ x 1 ∈ S 1 , x 2 ∈ S 2 } S_{1} ×S_{2}=\{(x_{1}, x_{2})|x_{1}\in S_{1}, x_{2}\in S_{2}\} S1×S2={(x1,x2)∣x1∈S1,x2∈S2} 如果 S 1 S_{1} S1和 S 2 S_{2} S2是凸集,那么 S 1 × S 2 S_{1}×S_{2} S1×S2也为凸集 线性矩阵不等式的解是凸的:我们称下式为线性矩阵不等式(LMI),其中 B , A i ∈ S m B,A_{i}\in S^{m} B,Ai∈Sm A ( x ) = x 1 A 1 + x 2 A 2 + . . . + x n A n ⪯ B A(x)=x_{1}A_{1}+x_{2}A_{2}+...+x_{n}A_{n}\preceq B A(x)=x1A1+x2A2+...+xnAn⪯B LMI的解集是凸集,即 { x ∥ A ( x ) ≤ B } \{x\| A(x) \leq B\} {x∥A(x)≤B}为凸集 这是因为:构造仿射变换 S + n = f ( x ) = B − A ( x ) S_{+}^{n}=f(x)=B-A(x) S+n=f(x)=B−A(x),由于 S + n S_{+}^{n} S+n为凸集,所以经过逆仿射变换后也为凸集, f − 1 ( S + n ) = { X ∣ B − A ( x ) ≥ 0 } f^{-1}(S_{+}^{n})=\{X|B-A(x)\geq 0\} f−1(S+n)={X∣B−A(x)≥0} 二:透视变换的保凸性 (1)透视变换透视变换:定义 P P P: R n + 1 → R n R^{n+1}\rightarrow R^{n} Rn+1→Rn(降维), P ( z , t ) = z t P(z,t)=\frac{z}{t} P(z,t)=tz为透视变换,其定义域为 P = R n × R + + ( z ∈ R n , t ∈ R + + ) P=R^{n}×R_{++}(z\in R^{n},t\in R_{++}) P=Rn×R++(z∈Rn,t∈R++)。透视变换对向量进行收缩(或称为规范化),使得最后一维向量为1并舍弃 简单理解:假设有一个 n + 1 n+1 n+1维向量,将它的前面 n n n个维度除以最后一个维度,则得到了一个 n n n维向量,此 n n n维向量就是原来 n + 1 n+1 n+1维向量透视后的结果。也即 ( x 1 , x 2 , . . . , x n , t ) → ( x 1 t , x 2 t , . . . , x n t , 1 ) → ( x 1 t , x 2 t , . . . , x n t ) (x_{1}, x_{2}, ... ,x_{n}, t) \rightarrow (\frac{x_{1}}{t},\frac{x_{2}}{t},...,\frac{x_{n}}{t},1)\rightarrow(\frac{x_{1}}{t},\frac{x_{2}}{t},...,\frac{x_{n}}{t}) (x1,x2,...,xn,t)→(tx1,tx2,...,txn,1)→(tx1,tx2,...,txn) (2)透视变换的保凸性透视变换保凸性:设有凸集合C= { ( x , t ) ∣ x ∈ R n , t > 0 } \{(x, t)| x\in \R^{n}, t>0\} {(x,t)∣x∈Rn,t>0},其透视变换所得集合为 { x t ∣ x ∈ R n , t > 0 } \{\frac{x}{t}|x\in \R^{n}, t>0\} {tx∣x∈Rn,t>0},这个集合也是凸的。当然一个凸集在反透视变换下仍是凸的,即 { ( x , t ) ∈ R n + 1 ∣ x t ∈ C , t > 0 } \{(x,t)\in R^{n+1}| \frac{x}{t}\in C, t>0\} {(x,t)∈Rn+1∣tx∈C,t>0}是凸的 关于透视变换保凸性可以这样理解:假设 n = 1 n=1 n=1,那么对应的就是一个二维向量向一维向量(标量)的透视,假定此二维向量为 ( x 1 , y 1 ) (x_{1}, y_{1}) (x1,y1),代入透视变换(函数)进行计算,那么其结果就是 ( x 1 y 1 ) (\frac{x_{1}}{y_{1}}) (y1x1),如果将它前面加上符号,然后再扩充一个维度,就可以得到一个新的点 ( − x 1 y 1 , − 1 ) (-\frac{x_{1}}{y_{1}}, -1) (−y1x1,−1)。如下图,透视变换就好像把 ( x 1 , y 1 ) (x_{1}, y_{1}) (x1,y1)投影到了 y = − 1 y=-1 y=−1这块“幕布上”。这类似于小孔成像,所以如果原来的集合是凸的,成像后自然也是凸的
分式线性变换:分式线性变换是透视变换和仿射变换的复合变换 假设 g : R n → R m + 1 g:R^{n}\rightarrow R^{m+1} g:Rn→Rm+1是仿射变换 A ∈ R m × n A\in R^{m×n} A∈Rm×n b ∈ R m b\in R^{m} b∈Rm c ∈ R n c\in R^{n} c∈Rn d ∈ R d\in R d∈Rg ( x ) = ( A c T ) x + ( b d ) = ( A x + b c T x + d ) g(x)=\begin{pmatrix} A \\ c^{T}\ \end{pmatrix}x+\begin{pmatrix} b \\ d\ \end{pmatrix}=\begin{pmatrix} Ax+b \\ c^{T}x+d\ \end{pmatrix} g(x)=(AcT )x+(bd )=(Ax+bcTx+d ) 故 f : R n → R m f:R^{n}\rightarrow R^{m} f:Rn→Rm为分式线性变换 f ( x ) = A x + b c T x + d f(x)=\frac{Ax+b}{c^{T}x+d} f(x)=cTx+dAx+b 定义域: { x ∣ c T x + d > 0 } \{x|c^{T}x+d>0\} {x∣cTx+d>0} (2)分式线性变换的保凸性分式线性变换的保凸性:仿射变换和透视变换都是保凸的,那么它们的组合分式线性变换自然也是保凸的。也即,若集合 { x ∣ x ∈ R n } \{x|x\in \R^{n}\} {x∣x∈Rn}是凸集,则其分式线性变换 f ( x ) = { A x + b c T x + d ∣ x ∈ R n , A ∈ R m × n , b ∈ R m , c ∈ R n , d ∈ R , c T x + d > 0 } f(x)=\{\frac{Ax+b}{c^{T}x+d}|x\in \R^{n}, A\in R^{m×n}, b\in R^{m},c\in R^{n},d\in\R,c^{T}x+d>0\} f(x)={cTx+dAx+b∣x∈Rn,A∈Rm×n,b∈Rm,c∈Rn,d∈R,cTx+d>0} 也是凸集 |
【本文地址】
今日新闻 |
推荐新闻 |